The Denavit-Hartenberg (D-H) Representation
Introduction
Denavit & Hartenberg, 1955. A systematic notation for assigning right-handed orthonormal coordinate frames to each link of the robot.
Transformations between adjacent coordinate frames can be represented by a single standard 4 * 4 homogeneous coordinate transformation matrix.
Notations
Lk: The frame associated with link k. Lk = {Xk, Yk, Zk}, where 0 <= k <= n.
Lk is attached to the distal end of link k. Last at tip of tool.
Algorithm: D-H Representation
Prerequisite: Number the joints from 1 to n, starting with the base, ending with the tool (1) yaw, (2) pitch, (3) roll. Assign L0 to robot base, with z0 aligning with the axis of joint 1. Set k = 1.
Iteration:
1. The zk axis aligns with the axis of joint k + 1.
2. The intersection of zk and zk-1 axes is selected as the origin of Lk.
3. Select xk to be orthogonal to both zk and zk-1. If zk and zk-1 are parallel, point xk away from zk-1.
4. Select yk to form a right-handed orthonormal coordinate frame Lk.
Follow-up:
(1). Set k = k + 1. If k < n, go to Step 1; else, continue.
(2). Set the origin of Ln at the tool tip. Align zn with the approach vector, yn with the sliding vector, and xn with the normal vector of the tool.
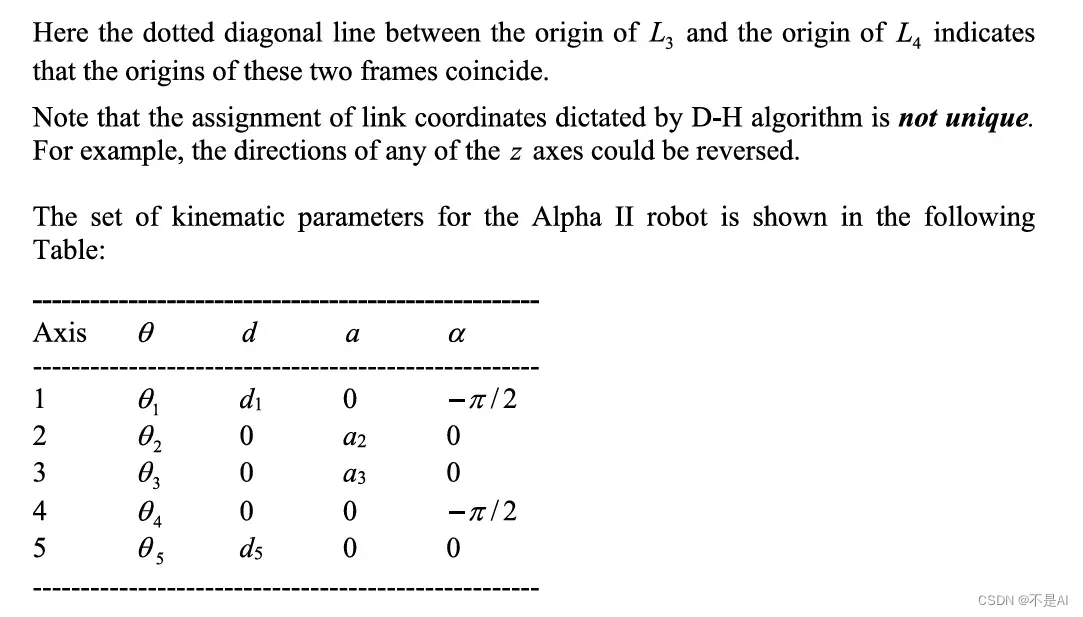
Kinematic parameters:
θk: The angle between xk-1 and xk axes about the zk-1 axis.
dk: The distance between xk-1 and xk axes along the zk-1 axis.
ak: The distance between zk-1 and zk axes along the xk axis.
αk: The angle between zk-1 and zk axes about the xk axis.
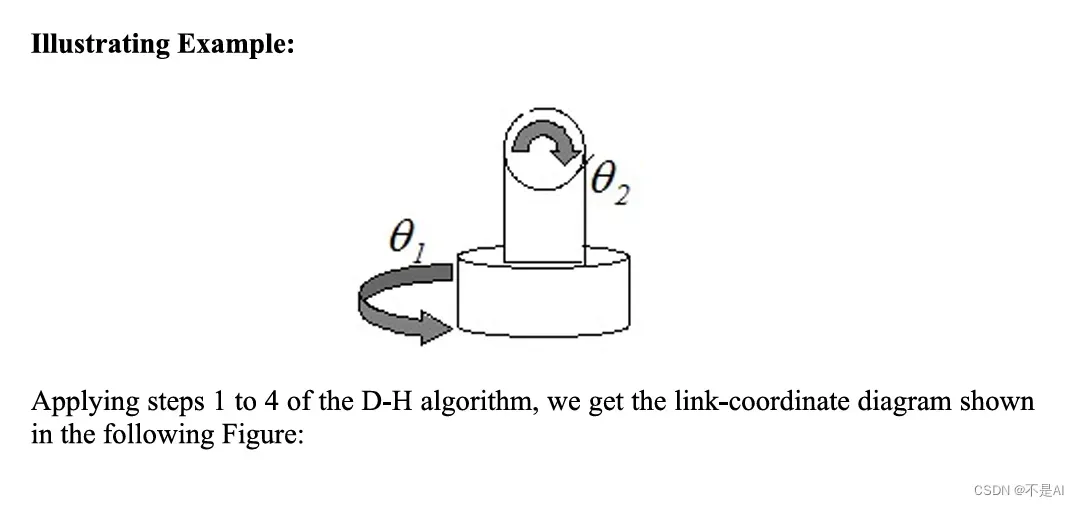
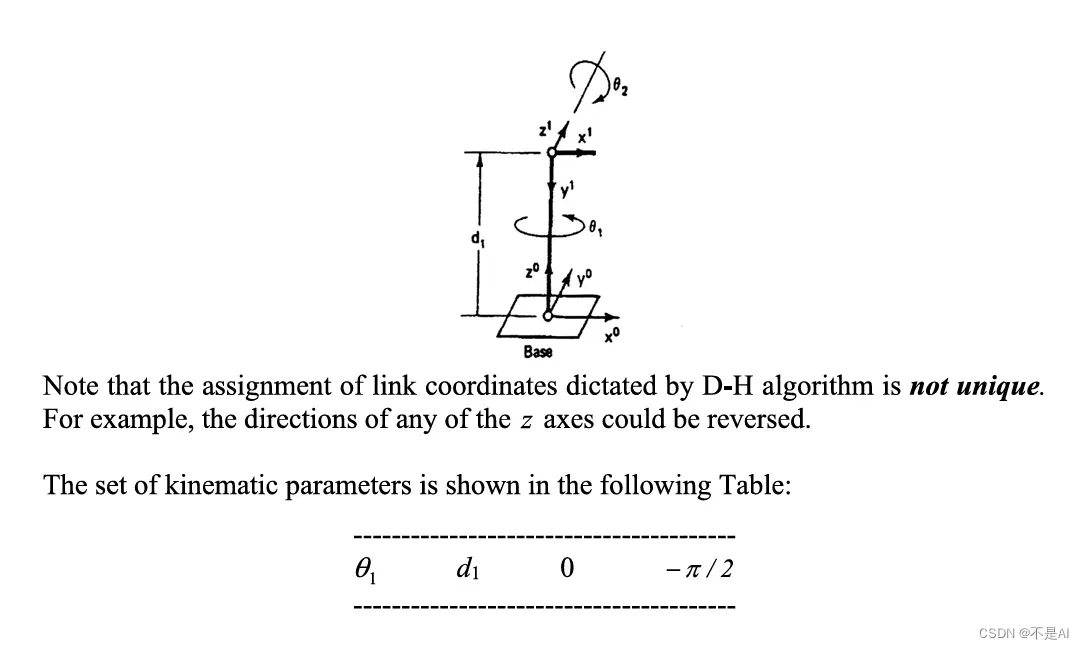
Example 1: Simple robot with 2 axes.
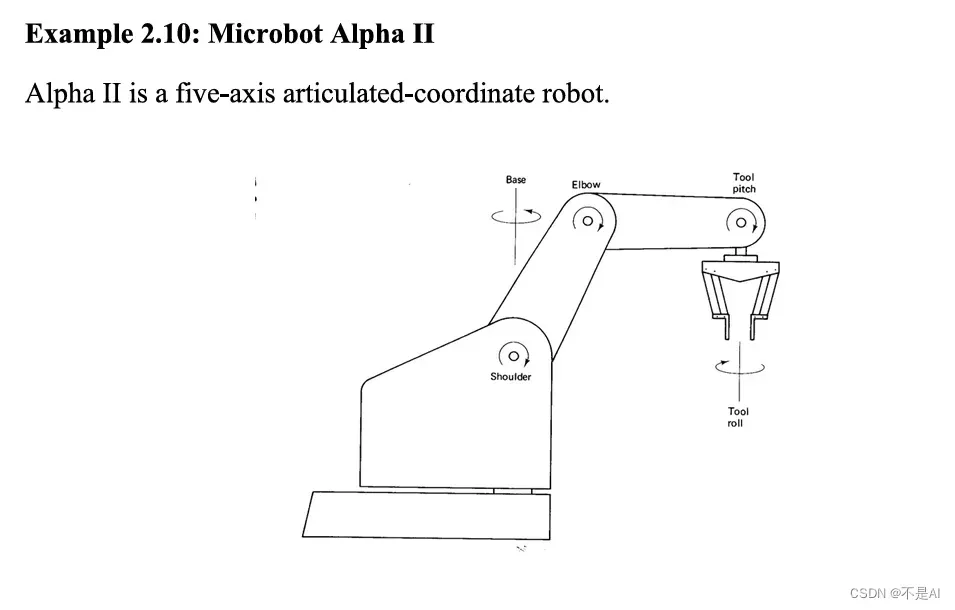
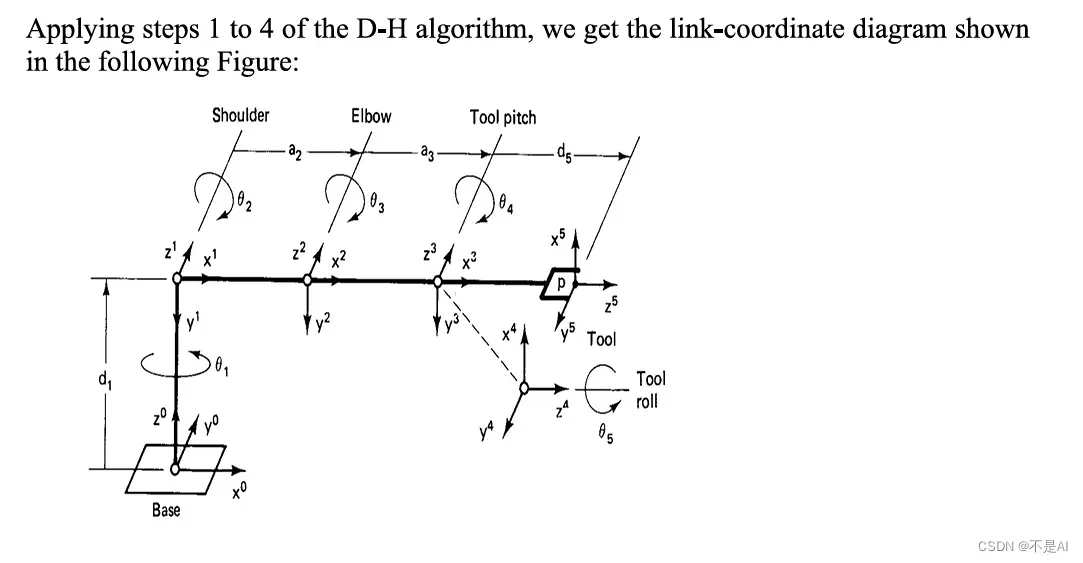
Example 2: 5-axis articulated robot Microbot Alpha II.
版权声明:本文为博主作者:不是AI原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_43031313/article/details/136374005