目录
- 一. 创建功能包
- 二. 编译运行
- 修改官方代码
- 参考
前言: 本次教程是官方提供的 MAVROS Offboard (板外) 控制示例,使用之前请搭建好 PX4 仿真环境
注:搭建仿真环境可以看下面教程👇
ubuntu搭建PX4无人机仿真环境(1) —— 概念介绍
ubuntu搭建PX4无人机仿真环境(2) —— MAVROS安装
ubuntu搭建PX4无人机仿真环境(3) —— ubuntu安装QGC地面站
ubuntu搭建PX4无人机仿真环境(4) —— 仿真环境搭建
ubuntu安装ROS melodic(最新、超详细图文教程)
一. 创建功能包
没有创建工作空间,可以执行下列代码,如果创建了可以跳过(如果是跟着我之前的教程,那就不用执行这一步)
注: catkin_make 与 catkin build 是编译功能包的两种方式,catkin_make 用的多一点,有兴趣的话可以看看它们的区别 👉 Migrating from catkin_make — catkin_tools
mkdir -p ~/catkin_ws/src
cd catkin_ws/src && catkin_init_workspace
# 使用catkin build话,则为cd catkin_ws && catkin init
cd .. && catkin_make# 使用catkin build话,则为 catkin build
# 再将 source ~/catkin_ws/devel/setup.bash 提案加到 .bashrc 文件中
在工作空间下新建一个 off_node 功能包
cd ~/catkin_ws/src
catkin_create_pkg off_node roscpp std_msgs geometry_msgs mavros_msgs
创建好后目录大致是下图所示:
在 off_node 功能包下的 src 目录下新建一个 offb_node.cpp 文件,将下列官方提供的代码复制进去(代码详解可以看官方的代码解释 MAVROS Offboard 控制示例 (C++) | PX4 自动驾驶用户指南 )
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo Classic SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg; // 无人机当前状态
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
// 切换 Offboard 模式
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
//无人机解锁
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose); // 发送目标点位置
ros::spinOnce();
rate.sleep();
}
return 0;
}
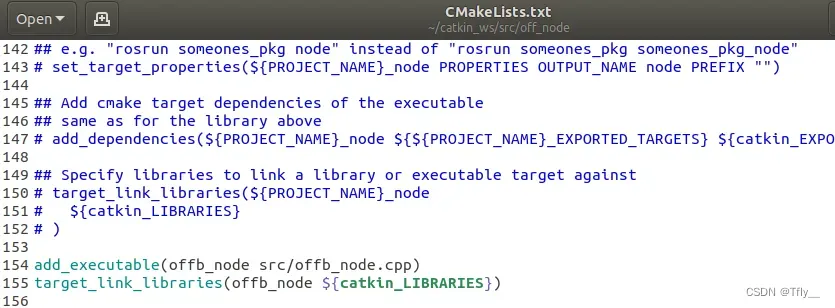
将下面内容添加到 off_node 功能包下的 CMakeLists.txt 文件里
add_executable(offb_node src/offb_node.cpp)
target_link_libraries(offb_node ${catkin_LIBRARIES})
二. 编译运行
cd ~/catkin_ws
catkin_make # 使用catkin build话,则为 catkin build
编译成功后,为了使用方便可以写一个 offb.sh 脚本来启动仿真
touch offb.sh
将下面代码复制上去
#!/bin/bash
source ~/.bashrc
gnome-terminal --window -e 'bash -c "roscore; exec bash"' \
--tab -e 'bash -c "sleep 5; roslaunch px4 mavros_posix_sitl.launch; exec bash"' \
--tab -e 'bash -c "sleep 10; rosrun off_node offb_node; exec bash"' \
运行
chmod +x offb.sh
./offb.sh
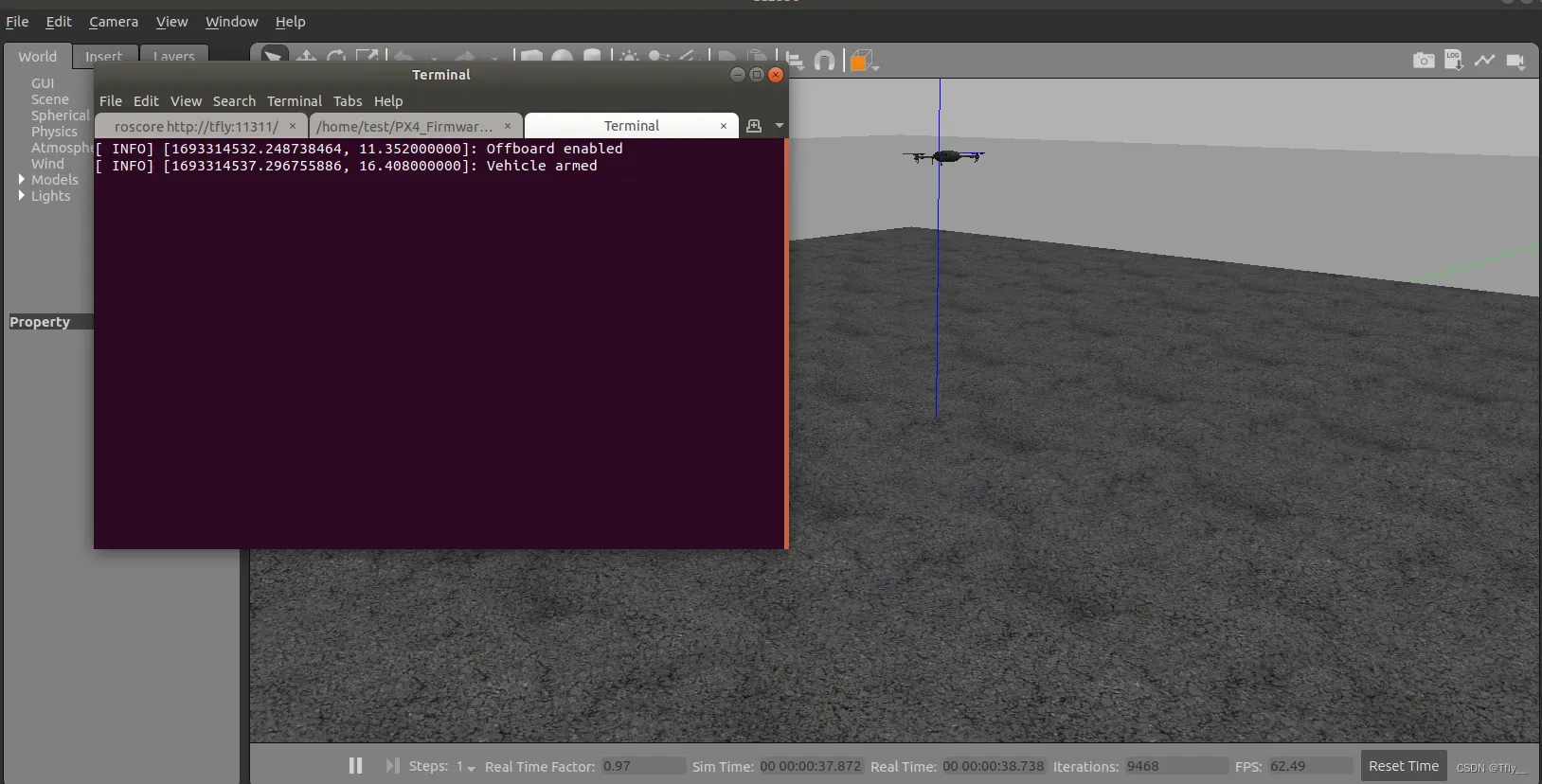
(无人机会切换到 Offboard 模式起飞两米,然后一直悬停)
修改官方代码
官方的示例代码会一直悬停不会降落,我们可以修改 offb_node.cpp 文件,加个降落的功能,代码如下:
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo Classic SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
using namespace std;
mavros_msgs::State current_state;
geometry_msgs::PoseStamped curr_pos; // 无人机当前位置
// 获取无人机当前状态
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
// 获取无人机当前位置
void arrive_pos(const geometry_msgs::PoseStamped::ConstPtr& msg){
curr_pos = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
// 订阅无人机的位置话题
ros::Subscriber local_pos_sub = nh.subscribe<geometry_msgs::PoseStamped>
("mavros/local_position/pose",10,arrive_pos);
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose; // 目标位置
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
int count = 0; // 计时
bool flag = true;
while(ros::ok()){
if( flag ) {
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
} // arm
last_request = ros::Time::now();
}
} // else
} // flag
// 当检测到与目标高度相差 ± 0.3 就开始悬停 30s
if(fabs(curr_pos.pose.position.z - pose.pose.position.z) <= 0.3){
count++;
if(count >= 600) // 30s
{
mavros_msgs::SetMode land_set_mode;
land_set_mode.request.custom_mode = "AUTO.LAND"; // 发送降落命令
if(set_mode_client.call(land_set_mode) && land_set_mode.response.mode_sent){
flag = false;
}
}
}
//任务结束,无人机降落完成并关闭该节点
if ( !flag && current_state.mode == "AUTO.LAND" && current_state.armed == false ) {
ROS_INFO("Drone has landed");
ros::shutdown();
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
修改完后,直接编译运行,下面👇视频是运行效果
PX4无人机仿真示例
参考
MAVROS Offboard 控制示例 (C++) | PX4 自动驾驶用户指南
PX4 与 MAVROS 实现offboard_rtt too high for timesync_manbushuizhong的博客-CSDN博客
如有其他问题,或者发现文章有错误,请在评论区留言
Keep learning!
版权声明:本文为博主作者:Tfly__原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_55944949/article/details/132570487