飞行动力学公式
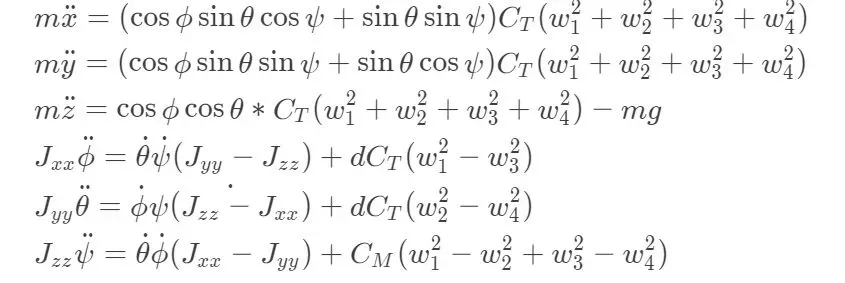
C_T为升力系数,C_M为扭力系数,w为螺旋桨的转速
姿态动力学(旋转过程)
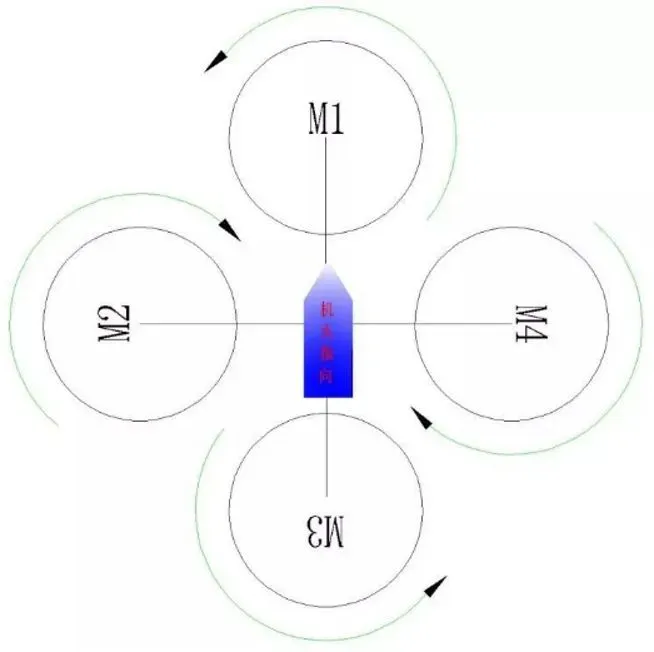
如果是‘十’字型的飞机
x,y,z轴的力矩为:

d是机体中心到每个螺旋桨的距离,b是一个系数;
f=Ct*W^2,Ct——升力系数,W——螺旋桨的转速
惯量矩阵为:

位置动力学(平移过程)
四个电机产生的力f1,f2,f3,f4,如果我们假设z轴向上为正,可以得到:

这样是不是很简单,四个电机的力都是在z轴方向的,重力也是z轴方向的,但是电机产生的力是机体坐标系下的,我们分析的加速度是在地理坐标系下的所有我们需要加一步坐标变换,还记得我们的好朋友机体坐标系转地理坐标系的旋转矩阵吗?(c表示cos,sb表示sin)


然后我们就得到书上的公式了,什么?不太像!,简写一下就一样了,你看变成一个专业的微分方程了。

得到:

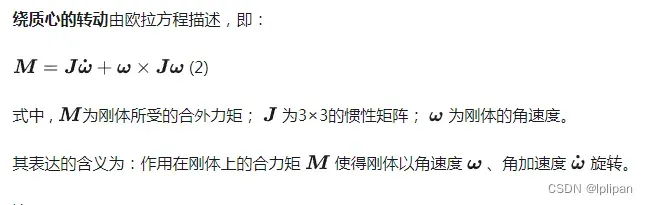
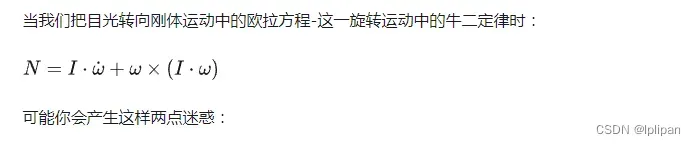
刚体运动欧拉方程
- 刚体旋转运动中的转动惯量I 对应于直线运动中的质量m。为什么质量m是一个普通的标量,而转动惯量一般为一个 2×2 (在二维空间中旋转-在桌面上转一张A4纸)或者3×3(在三维空间中旋转-在指尖转篮球、或者在对机械臂进行建模时) 的矩阵呢。
- 欧拉方程的第一项:角加速度
与转动惯量 I 相乘似乎能够与牛二定律中的加速度a 与物体质量 m对应上,但是后面第二项又是什么呢?尤其是为什么这还是一个“速度项/或说成是转角的一阶项”——在牛二定律中我们可不包含位置的一阶项。
接下来对这两个问题进行解答。
关于第一个问题:
首先我们要弄清楚的是,牛二定律的研究对象是一个质点的运动。质点作为一个点,本身是0维的。“质量”是一个“点”的参数。
而考虑旋转运动时,自然不能把物体看作一个抽象的点。除了物体的总质量以外,物体的形状、质量分布、与旋转轴的选取等因素也决定了外力导致他们转动的难易程度。参照图一所示的偏心轮结构,可以想象即使在总质量相同的情况下,一个像偏心轮这样的扇型结构与一个质量分布均匀的完整圆盘相比,转动表现也截然不同。而如果考虑调整旋转轴的位置,偏心轮也可能像一个圆盘一样能够平稳的旋转。甚至我们还可以改变旋转的方向,像在桌子上转硬币一样转一个圆盘,所需的外力又是一种情况。从数学的角度来看,我们可以总结影响旋转的参数不仅有总质量,还有物体的质量分布与你选择的旋转轴。而你所选择的旋转轴可以被进一步抽象成你所选择的坐标系——你是圆盘像光碟放在桌子上一样,把垂直于盘面的方向当成z轴,还是像在桌面转硬币一样,把盘面上的某个直径当成z轴,甚至是更奇怪的一些选择。

图一:常用来在工业生产中产生振动的偏心轮结构。偏心轮是质量极不均匀的半圆或者扇形结构,中间有孔用于链接电机。图片来源:https://www.sohu.com/a/233988206_574770。本文仅用于个人思路整理与知识分享,该图片的使用尚未联系原作者进行授权,如有侵权请联系我删除。
因此,在一个给定的坐标系下,物体的质量分布与不同旋转轴的选择都有影响。因此当我们选定一个三维坐标系时,物体在这个坐标系中旋转的性质的描述就需要一个 3×3 的张量来表达了(0维张量是点,一维是向量,二维是矩阵。还有更高维度的。但是虽然张量与向量、矩阵有类似的表现形式,但是张量与他们最核心的区别是:张量中的每个元素是相互制约的。比如在你选择不同的参考系时,这个转动惯量的张量要随着参考系或者物体质量分布的更改而一同更新,你对这其中任何一个元素的单独操作如果找不到与之对应的这个张量所整体描述的性质的变化时,这种操作会完全破坏掉张量所暗含的物理意义。因此张量与向量与矩阵的最核心的区别还可以被总结成,张量永远要作为一个整体理解,他这个整体代表一种性质。而向量和矩阵本身只能看做一种数据的表现形式而已。)
这一张量暗含着物体在这个坐标系中质量分布,与在任何一个方向、任何一个轴(不仅仅是绕着 xyz轴 )进行转动时,他所具有的性质。
关于第二个问题:
欧拉公式这两项分别合外力矩与惯性力(离心力和科里奥利)。
你想象一个匀速转动的圆盘。
第一项就是转盘加速要让圆盘上的每个质量元都要加速,那关于这个旋转轴(在这个旋转的惯性系里定义的旋转轴)的角加速度与在这个参考系下描述的转动惯量的点乘就是所需的合外力了——与牛二定律相似。
第二项就是惯性力,你可以考虑你拎着水桶转圈,你需要提供向心力;或者车轮胎重心和旋转轴不重合,会产生震动(车轮胎拉着轴晃来晃去——和图一偏心轮所表现出的工作模式一样)。你在匀速转动的时候就有这个惯性力,而且转的越快震动越大。正因为他代表着一种类似离心力的惯性力,所以你看他的形式类似于 ,就像高中学的向心力=
.只不过物体在圆盘上不仅受一个离心力,还受一个科里奥利力。离心力是沿着半径往外指的,科里奥利力是垂直于半径往切向指的。比如你想象一个小球从圆盘中心往外做匀速直线运动。但是你看他沿着半径往外运动以外,在世界坐标系中,他在切向的速度也随着运动增大,即
,随着离圆心越来越远 r也增大。他的切向加速度逐渐线性增大就像受了一个力一样。但是科里奥利力和离心力都是假想力,而且只跟一阶的角速度有关。第二项的直接得到的一个矢量力就是包含了由于旋转速度-角速度(不是旋转加速度-角加速度)引起的离心力(法向)和科里奥利力(切向)的合力。因此欧拉方程描述了就是在世界参考系下面看旋转的惯性系里物体所需要受的惯性力和非惯性力的合力。
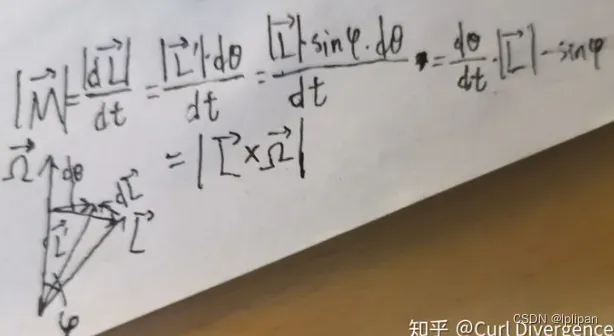
这里需要提醒一下大家,角速度w 的方向是沿着旋转轴的,因此根据叉乘的右手法则,第二项的惯性力是落在旋转物体“盘面”上的。这也符合我们对于离心力和科里奥利力的理解
 角动量又称动量矩
角动量又称动量矩
版权声明:本文为博主作者:lplipan原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/lplipan/article/details/136486912