一、Epson手臂配置
1.安装Epson手臂控制软件
安装Epson手臂控制软体EPSON RC+ 7.0(根据实际需求下载应用),可以去官网下载安装。
2.硬件配置
准备一台PC,用网线连接PC和EPSON手臂控制器。
3.在PC上修改IP地址
EPSON手臂默认IP(192.168.0.1),PC IP改为手臂同一网段(如192.168.0.2),打开EPSON RC+ 7.0软件。如图1和图2

图1

图2
步骤1:打开软件EPSON RC+ 7.0;
步骤2:点击图1的连接,然后点击增加,弹出图2,点击确定;
步骤3:修改图1的IP(根据需要自定义(192.168.30.1),也可以直接配置成默认IP192.168.0.1),然后点击应用。
4.修改PC IP与手臂同一网段

图3
5.导入程式(准备好的程式)到手臂控制器
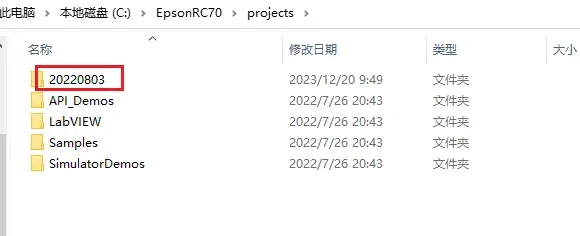
图4
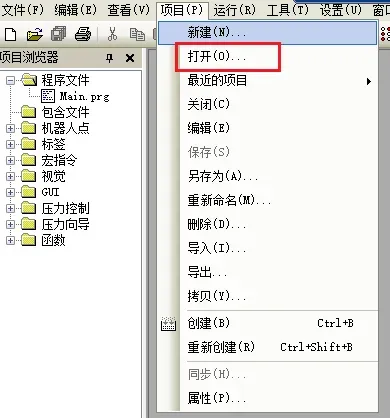
图5
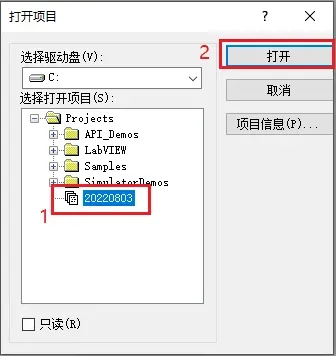
图6
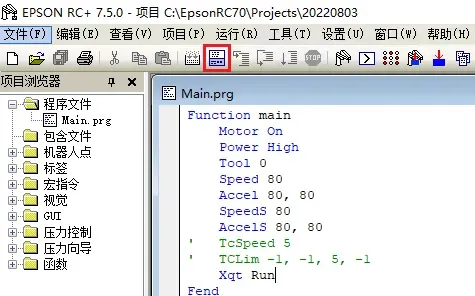
图7
步骤1:准备好手臂程式,将程式放到手臂软件安装目录(如图4)下;
步骤2:如图5、图6打开程式;
步骤3:如图7,点击红色框,运行,到此软件导入手臂控制完成。
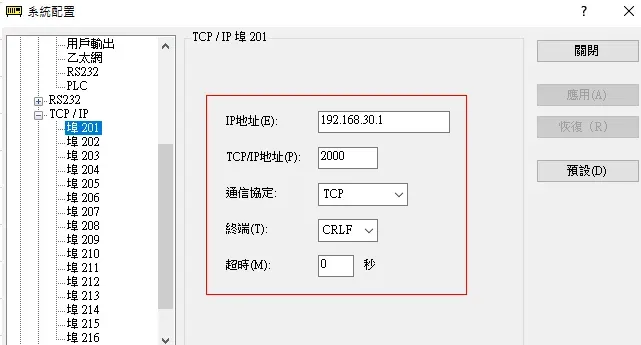
6.系统配置

图8
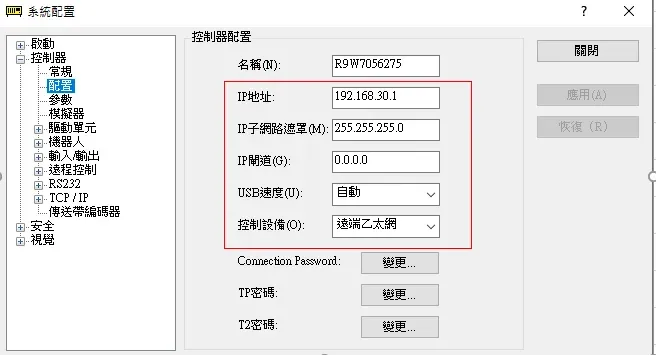
图9

图10
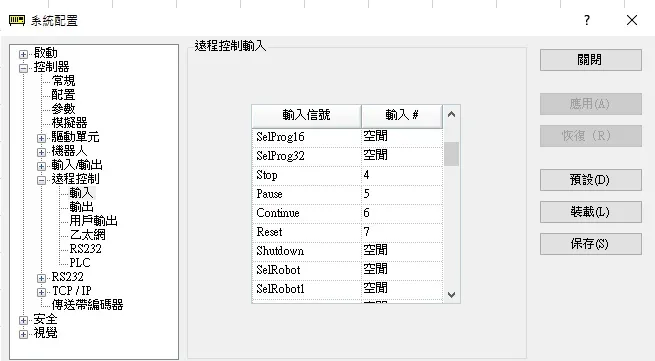
图11

图12
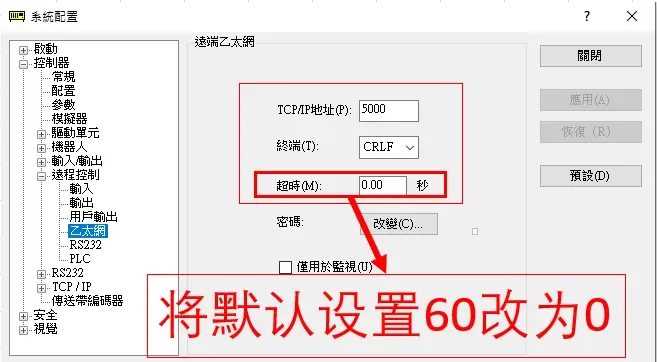
图13
版权声明:本文为博主作者:susan花雨原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/qq_42711010/article/details/135100611