文章目录
一、 算法简介
恒虚警率(CFAR)算法是一种广泛应用于雷达目标检测的算法,其主要目 标是减少由于杂波与回波之间强度不对称而引起的误报,以确保相对恒定的虚警 率。如图 3.4(a)所示,表示由距离单元组成的一维数据。在待测单元 D 周围选 择若干个背景杂波功率的蓝色单元构成参考滑窗,称为参考单元;而待测单元 D 相邻的若干个不用于背景估计的单元则称为保护单元。当参考单元和保护单元的 维度从一维扩展到二维时,相应的 CFAR 检测由一维 CFAR 演变为二维 CFAR 以处理参考窗口,如图 3.4 (b)所示。

1.1均值类 CFAR
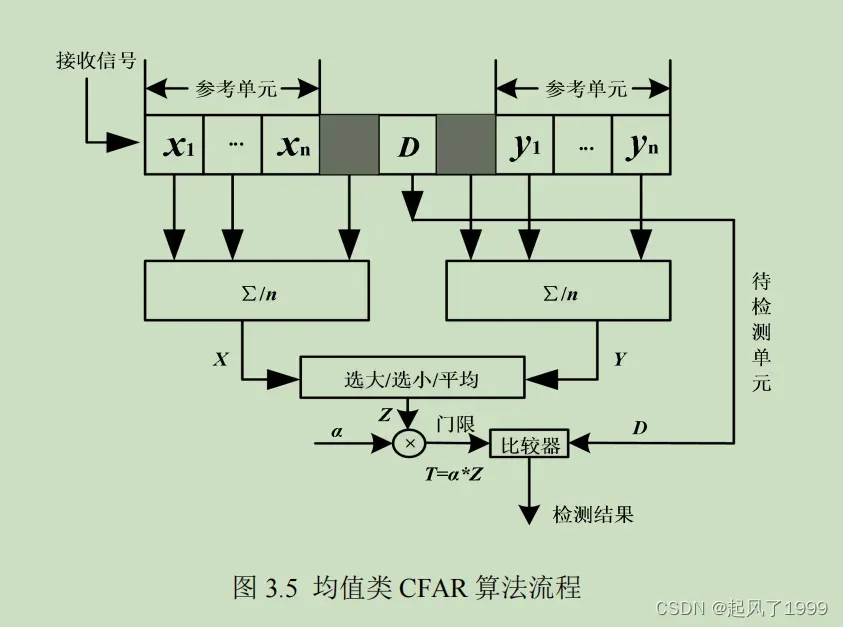
均值类 CFAR 主要包括 Ca-CFAR、Go-CFAR和 So-CFAR检测器。在 图 3.5 中,CFAR 利用待测单元 D 前后形成的参考窗口的前沿和后沿局部估计, 对这些局部估计取均值、较大值或较小值,从而得到对待测单元 D 的背景杂波 功率的估计结果。
在 CA-CFAR 检测器中,对背景杂波功率的估计是通过对长度为 N=2n 的参 考单元的均值进行计算而得出的。CA-CFAR 的总杂波功率(Z)表达式为:

在杂波边缘,CA-CFAR 检测器的虚警概率可能会显著增加,并且在多目标 环境下检测性能可能下降。为了解决这一问题,GO-CFAR 检测器算法专门设计 用于应对杂波边缘效应。该算法选择两个局部估计值中的较大者作为背景杂波功 率的估计值,具体表达式为:
SO-CFAR 检测器的设计重点在于应对单边滑窗中可能出现的多个干扰目标。 该检测器采用两个局部估计值中的较小值作为背景杂波功率的估计值,具体表达 式为:

检测门限准则:
式中 T 为检测门限,α为门限系数,N 为待检测的单元数,Z 为均值类 CFAR 背 景杂波功率估计;其中门限乘积系数由恒虚警率 PFA决定
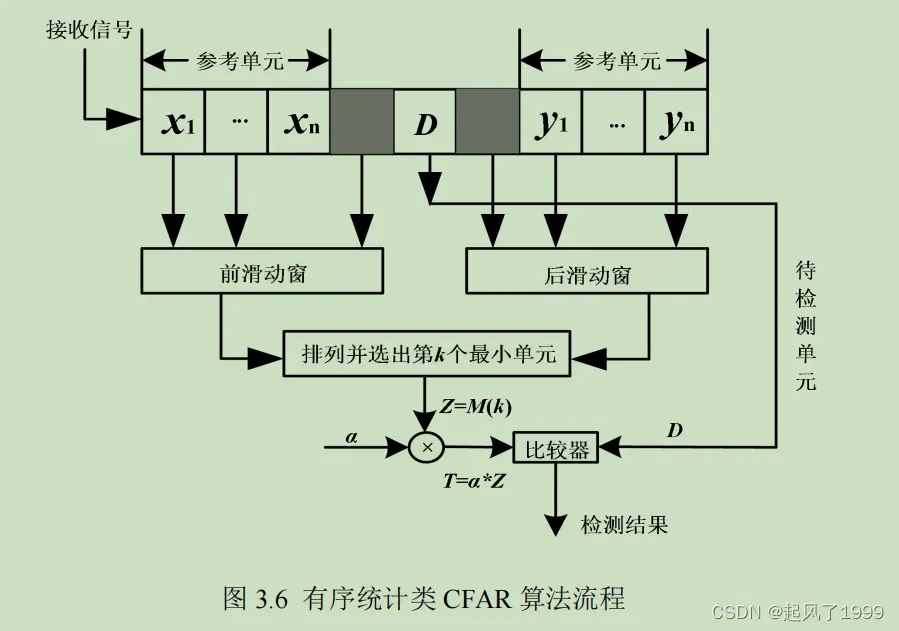
1.2有序统计 CFAR
有序统计 CFAR(OS-CFAR)基于参考滑窗内的有序样本进行处理,如图 3.6 所示。相较于均值类 CFAR 检测器,OS-CFAR 在多目标检测环境中表现更为优 越,同时在均匀杂波背景下的检测性能下降较小。
1.3CFAR 检测局限与性能对比
假设存在两个或更多的目标,其中一个目标位于检测单元,而其他两个或多 个目标位于参考窗口。当相邻的干扰功率远小于参考窗口中的目标功率时,由于 背景杂波功率偏高,CFAR 的检测阈值提高,可能导致检测单元的目标被遮蔽。 这种现象被称为目标遮蔽效应[59]。在虚警概率为 10-4、参考单元数 36、保护单
元数 2、平均背景功率为 20dB 的均匀背景杂波条件下,均值类 CFAR 的检测结 果如图 3.7 所示。

对于 CA-CFAR 检测器,在检测 103 处的目标时,位于 88 处距离单元的目标 进入了参考窗,导致 CFAR 检测器的阈值升高,从而 103 处的目标未能被检测到。 而对于 GO-CFAR 检测器,由于选取了局部数据的较大值,导致检测阈值过高; 相反,SO-CFAR 检测器选取了局部数据的较小值,因此成功检测到 103 处的目 标。
雷达检测的物体可能包括油水、植被、金属物体等,形成复杂的混合场景。 这些场景通常具有非均匀性,可能导致前后参考单元处理的杂波功率出现较大的 非均匀性。这种情况会导致 CFAR 检测器在边缘处出现虚警或漏警等现象,即杂 波边缘效应的体现。
如图 3.8 所示,针对边缘杂波检测场景,本文采用常见的均值类 CFAR 检测 器进行目标检测。在这个场景中,虚警概率为 10-3,参考单元数为 20,保护单元 数为 2。前 100 个参考单元的平均功率为 20dB,而后 100 个参考单元的平均功 率为 30dB,模拟检测区域从原油过渡到容器。
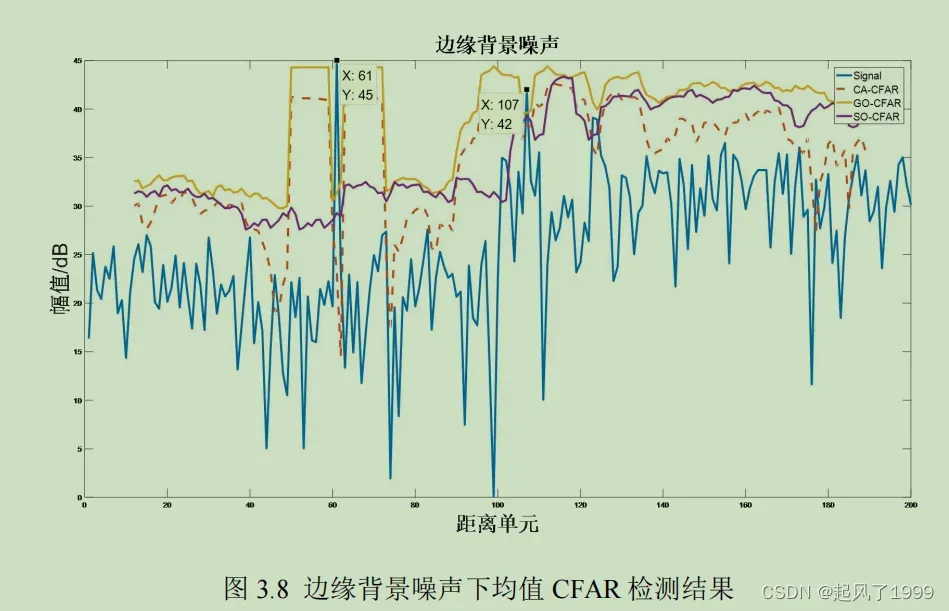
在背景杂波的平均功率为 20dB 条件下,45 处目标通过均值类 CFAR 全部检 测出来;在 20dB 到 30dB 的过渡边缘区域,经过 CA-CFAR 和 SO-CFAR 检测器 在 107 处目标出现虚警,而 GO-CFAR 检测器在边缘效应下检测结果良好。
版权声明:本文为博主作者:起风了1999原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/m0_56120826/article/details/135960850