目录
一、遥控器设置
第一步要对遥控器进行设置。不同的教程有不同的推荐数值,这是一种测试可用的方案。missionplanner可以在初始设置飞行模式设置六种模式。
警告⚠️
1.飞行模式需要其他模块的支持,例如气压计,高度计,指南针🧭,不正确的设置飞行模式可能因为缺少硬件支撑而无法发挥作用。
2.不恰当的设置飞行模式可能导致危险,例如自行升空遇到障碍物炸机。自行执行航线缺乏避障炸机等。
3.飞行模式切换应当充分预估目标达成度。例如电量是否允许。
4.应在具备安全防护措施的区域对所需的模式进行测试调试,必要时采取系留措施。
5.无人机结构不牢固可能因切换模式时的剧烈运动导致无人机失控直至炸机。
6.部分飞行模式切换会带来高度的突然上升或下降。
7.部分飞行模式无法解锁无人机,无法安全降落或无法停机,错误操作可能加剧无人机失控。
8.设置最熟悉的档位可以便捷切换到自稳模式,紧急情况可以立即夺回控制权。
二、飞行模式设置
(一)设置方法
(二)关于简单模式和超简单模式
(三)主要飞行模式
1.稳定模式
2.高度保持模式
3.悬停模式
4.RTL模式
5.自动模式
一、遥控器设置
第一步要对遥控器进行设置。不同的教程有不同的推荐数值,这是一种测试可用的方案。missionplanner可以在初始设置飞行模式设置六种模式。
警告⚠️
1.飞行模式需要其他模块的支持,例如气压计,高度计,指南针🧭,不正确的设置飞行模式可能因为缺少硬件支撑而无法发挥作用。
2.不恰当的设置飞行模式可能导致危险,例如自行升空遇到障碍物炸机。自行执行航线缺乏避障炸机等。
3.飞行模式切换应当充分预估目标达成度。例如电量是否允许。
4.应在具备安全防护措施的区域对所需的模式进行测试调试,必要时采取系留措施。
5.无人机结构不牢固可能因切换模式时的剧烈运动导致无人机失控直至炸机。
6.部分飞行模式切换会带来高度的突然上升或下降。
7.部分飞行模式无法解锁无人机,无法安全降落或无法停机,错误操作可能加剧无人机失控。
8.设置最熟悉的档位可以便捷切换到自稳模式,紧急情况可以立即夺回控制权。



二、飞行模式设置
(一)设置方法
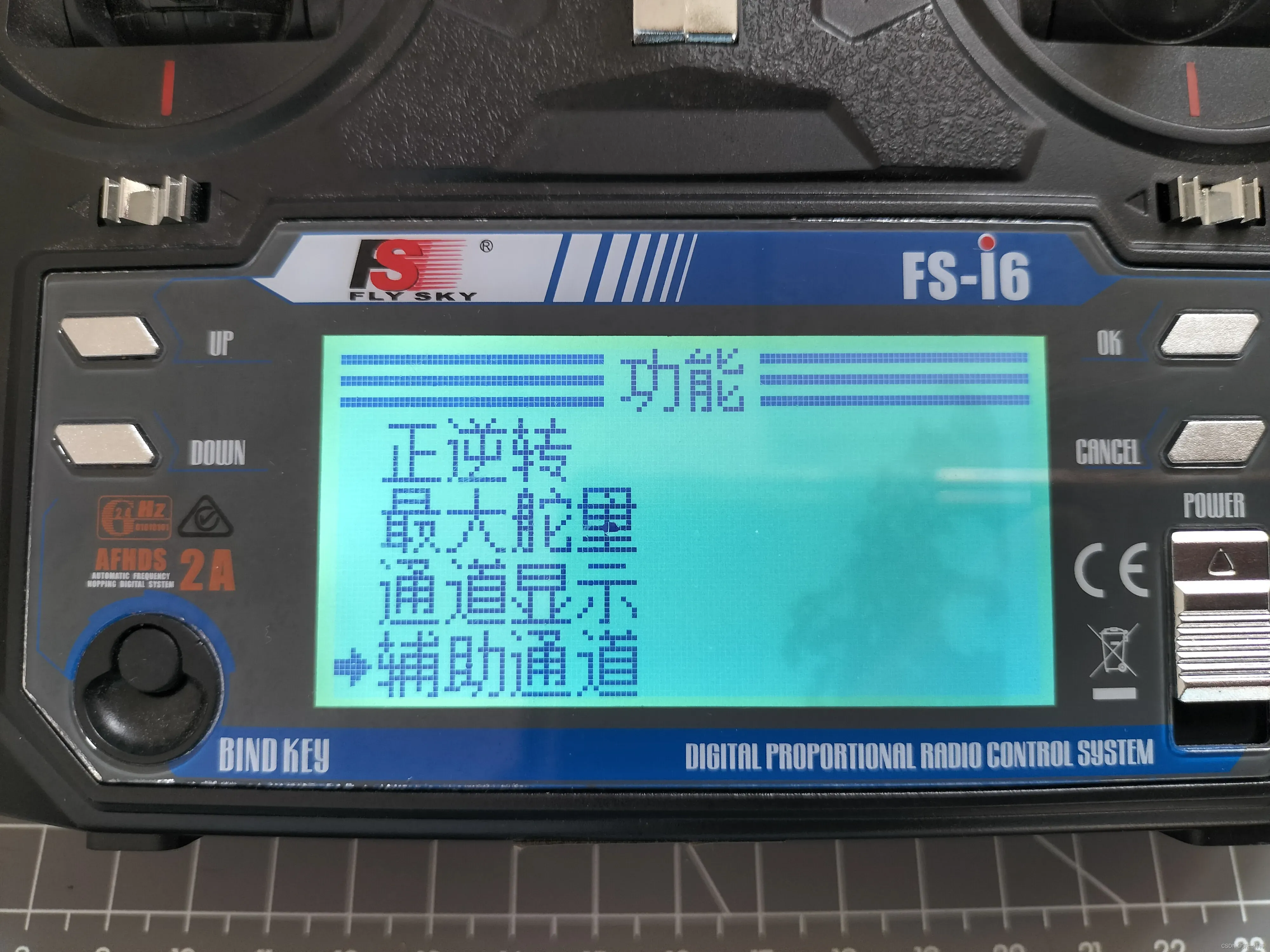
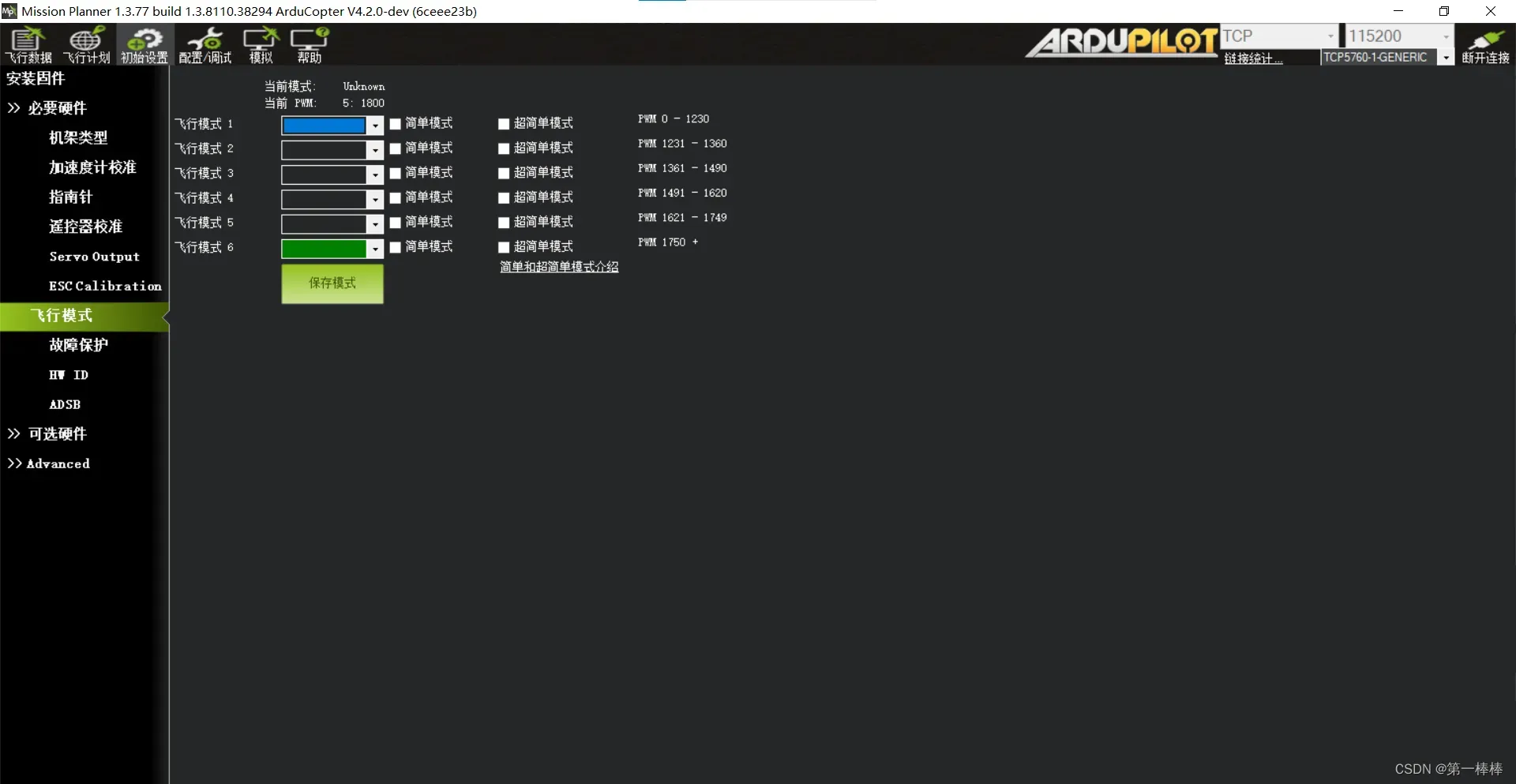
打开初始设置——必要硬件——飞行模式。
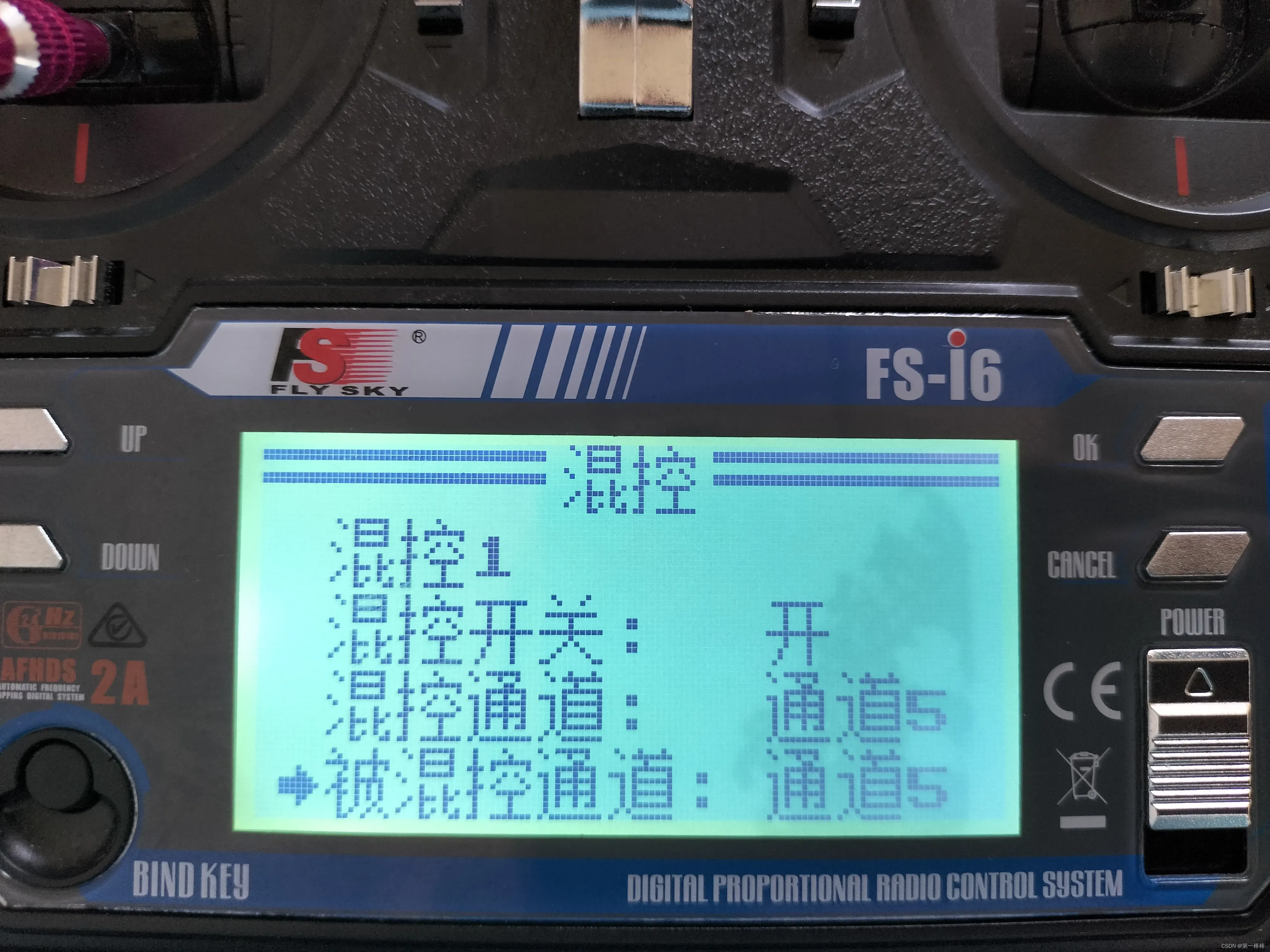
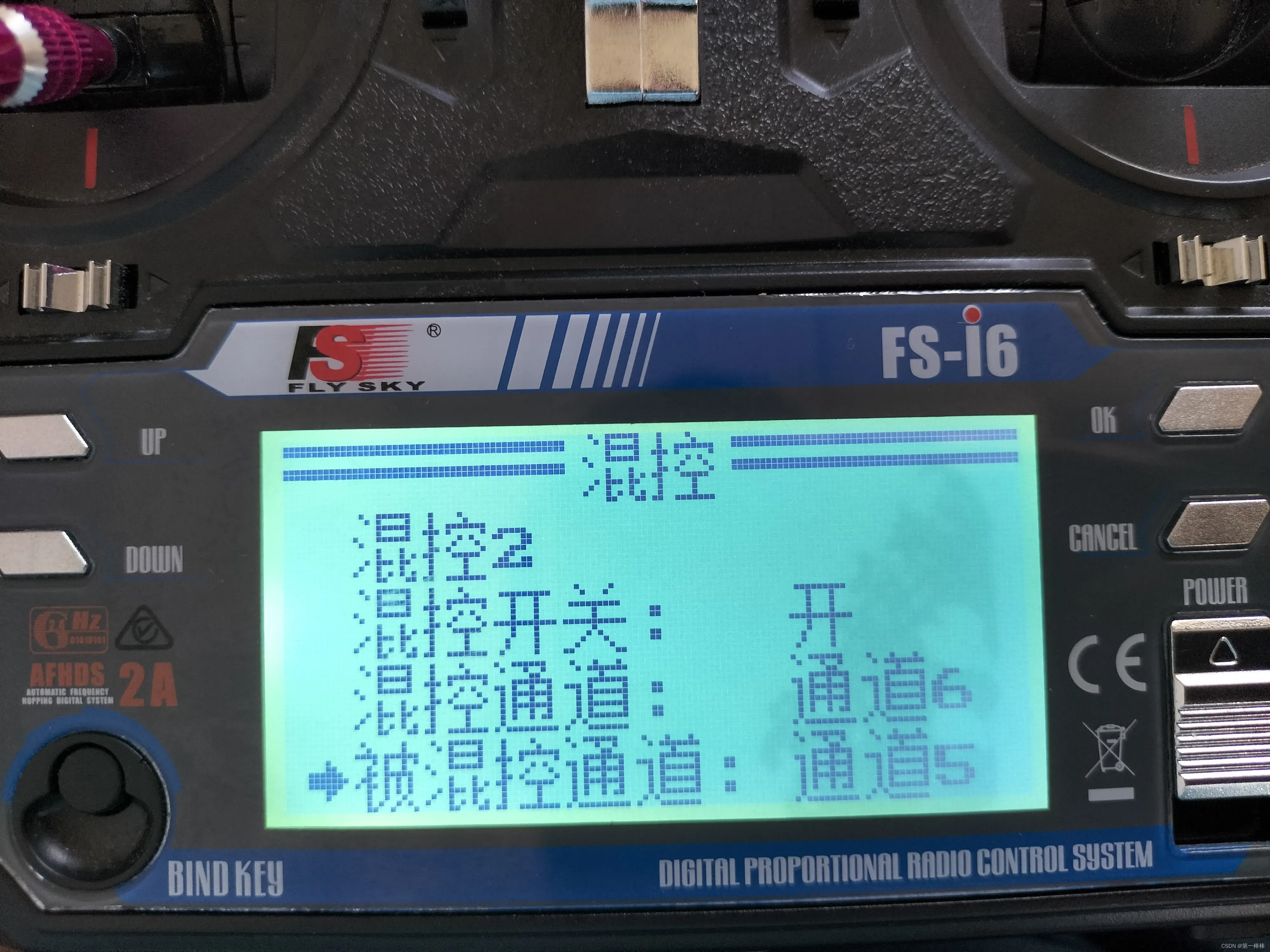
切换遥控器的飞行模式开关(通道5),绿色高光就会移动到不同的位置,然后选择对应的模式
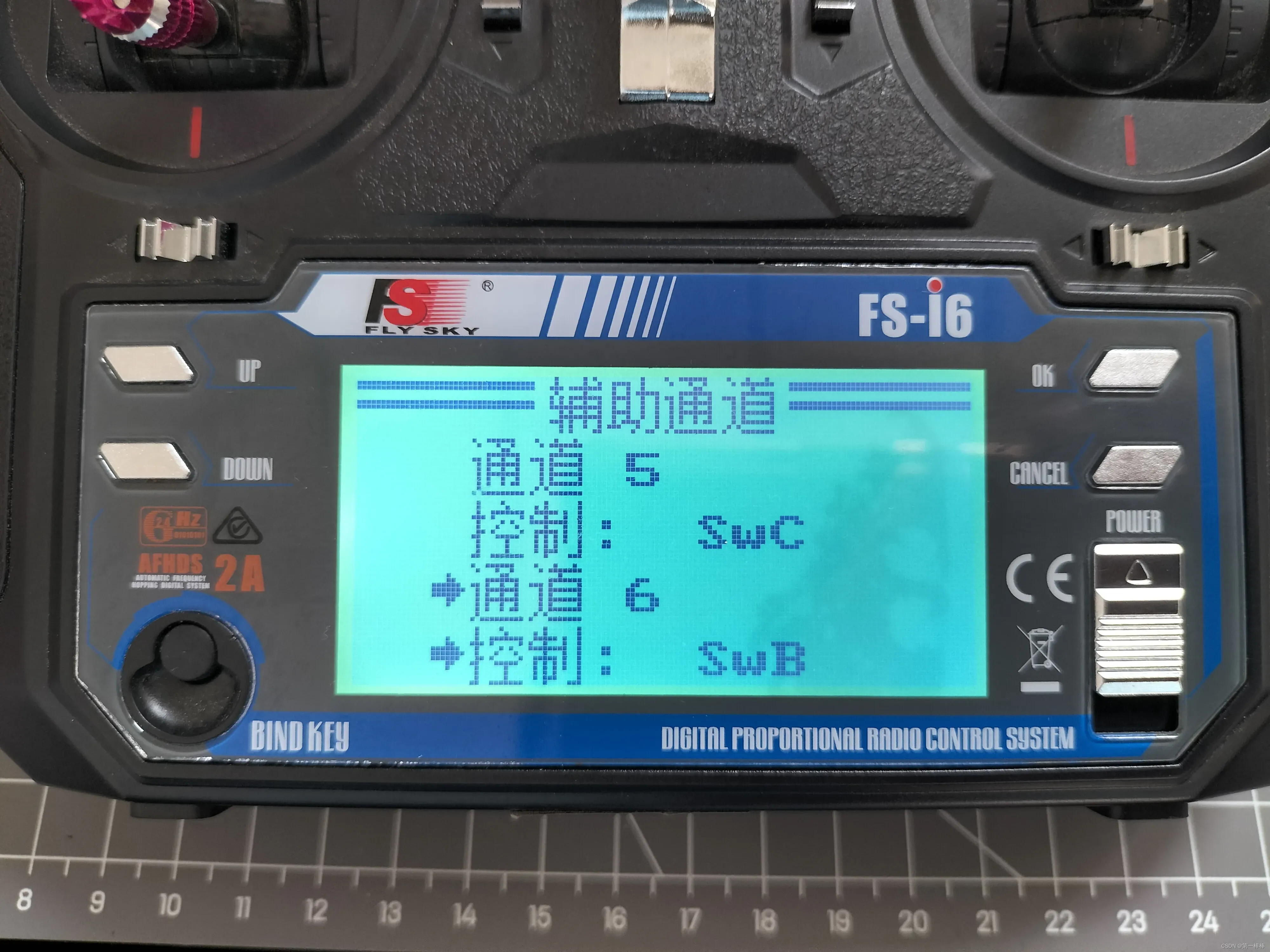
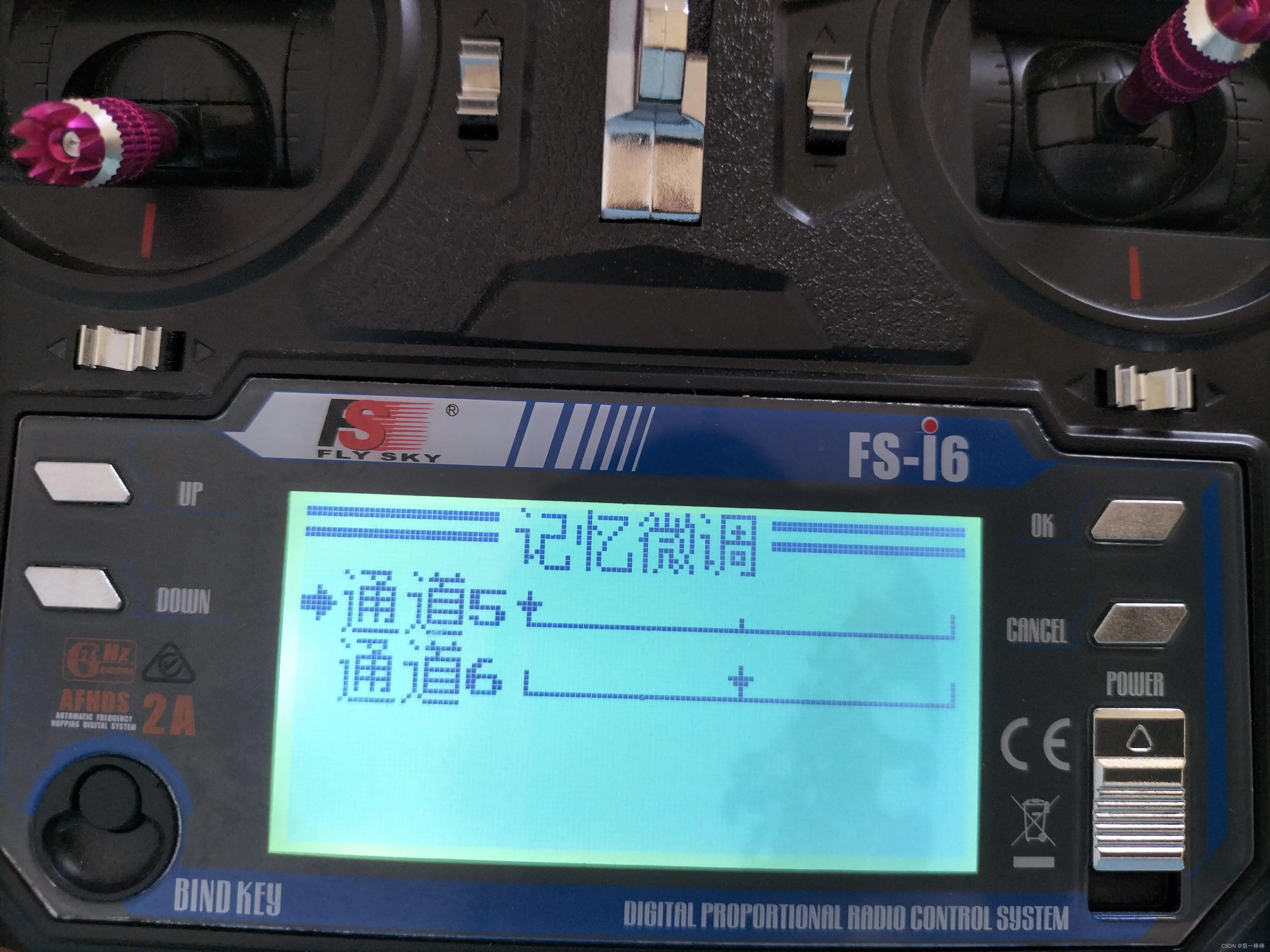
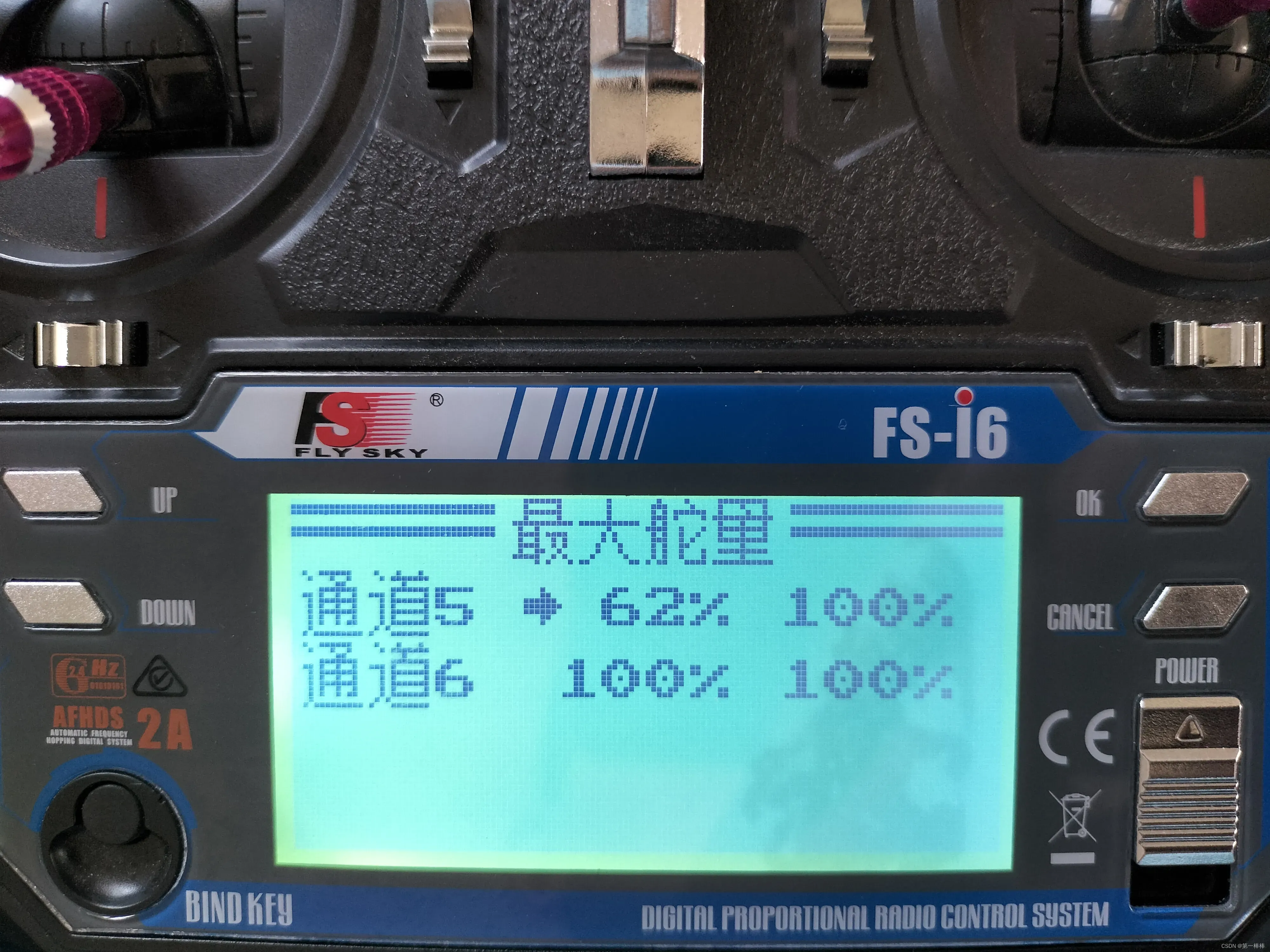
一般情况flyskyi6遥控器使用swc挡位可以设置三个模式,如果设置更多的挡位,可以通过混控来设置6个模式。
完成后点击——保存模式,完成设置。
(二)关于简单模式和超简单模式
Simple and Super Simple Modes
“Simple” and “Super Simple” modes allow the pilot to control the movement of the copter from the pilot’s point of view regardless of which way the copter is facing. This is useful for new pilots who have not mastered adjusting their roll and pitch inputs depending upon which way the vehicle is facing and for cases when the copter is far enough away that it’s heading is not apparent.
“Simple” and “Super Simple” modes can be used in combination with nearly all flight modes except the Acro and Drift (in these flight modes the setting is ignored).
Simple Mode allows you to control the copter relative to the copters heading at take off and relies only on a good compass heading.
Super Simple Mode allows you to control the copter relative to it’s direction from home (i.e. where it was armed) but requires a good GPS position.
Either mode can be assigned to a particular flight mode switch position or can be enabled/disabled from the Ch7/Ch8 switches.
简单和超简单模式
“简单”和“超级简单”模式允许飞行员从飞行员的角度控制直升机的移动,而不管直升机面对的是哪种方式。这对于尚未掌握根据飞行器所面对的方向调整其横滚和俯仰输入的新飞行员以及直升机距离足够远以致其航向不明显的情况下非常有用。
“简单”和“超简单”模式可与除Acro和Drift之外的几乎所有飞行模式结合使用(在这些飞行模式中,设置被忽略)。
简单模式允许您相对于起飞时的直升机航向控制直升机,并且仅依赖于良好的罗盘航向。
超级简单模式允许你从家里(即武装的地方)相对于直升机的方向控制直升机,但需要一个良好的GPS位置。
任何一种模式都可以分配到特定的飞行模式开关位置,或者可以从Ch7/Ch8开关启用/禁用。
(三)主要飞行模式
直升机有25种飞行内置飞行模式,其中10种经常使用。有多种模式支持不同级别/类型的飞行稳定、复杂的自动驾驶仪、跟随系统等。飞行模式通过无线电(通过发射器开关)、任务命令或使用地面站(GCS)或配套计算机的命令进行控制。
下表显示了每个飞行模式是否提供高度或位置控制,以及是否需要来自传感器(通常是GPS)的有效位置信息才能启用或切换到此模式。
Mode Alt Ctrl Pos Ctrl Pos Sensor Summary Acro – – Holds attitude, no self-level Airmode – -/+ Actually not a mode, but a feature,see below Alt Hold s + Holds altitude and self-levels the roll & pitch Auto A A Y Executes pre-defined mission AutoTune s A Y Automated pitch and bank procedure to improve control loops Brake A A Y Brings copter to an immediate stop Circle s A Y Automatically circles a point in front of the vehicle Drift – + Y Like stabilize, but coordinates yaw with roll like a plane Flip A A Rises and completes an automated flip FlowHold s A Position control using Optical Flow Follow s A Y Follows another vehicle Guided A A Y Navigates to single points commanded by GCS Heli_Autorotate A A Y Used for emergencies in traditional helicopters. Helicopter only. Currently SITL only. Land A s (Y) Reduces altitude to ground level, attempts to go straight down Loiter s s Y Holds altitude and position, uses GPS for movements PosHold s + Y Like loiter, but manual roll and pitch when sticks not centered RTL A A Y Returns above takeoff location, may also include landing Simple/Super Simple Y An add-on to flight modes to use pilot’s view instead of yaw orientation SmartRTL A A Y RTL, but traces path to get home Sport s s Alt-hold, but holds pitch & roll when sticks centered Stabilize – + Self-levels the roll and pitch axis SysID – + Special diagnostic/modeling mode Throw A A Y Holds position after a throwing takeoff Turtle – – Allows reversing and spinning up adjacent pairs of motors in order to flip a crashed, inverted vehicle back upright ZigZag A A Y Useful for crop spraying
Symbol Definition – Manual control + Manual control with limits & self-level s Pilot controls climb rate A Automatic control
表格来源:Flight Modes — Copter documentation尝试翻译如下:
Mode Alt Ctrl Pos Ctrl Pos Sensor Summary Acro – – 保持姿态,没有自我水平 Airmode – -/+ 实际上不是一种模式,而是一种功能,见下文 Alt Hold s + 保持高度并自平滚和俯仰 Auto A A Y 执行预定义任务 AutoTune s A Y 改进控制回路的自动变桨和倾斜程序 Brake A A Y 立即停止直升机 Circle s A Y 自动绕车辆前方的一个点旋转 Drift – + Y 像稳定一样,但像平面一样用横滚来协调偏航 Flip A A 上升并完成自动翻转 FlowHold s A 光流位置控制 Follow s A Y 跟随另一辆车 Guided A A Y 导航到地面军事系统命令的单点 Heli_Autorotate A A Y 用于传统直升机的紧急情况。仅限直升机。目前仅限SITL。 Land A s (Y) 将高度降至地面,尝试直线下降 Loiter s s Y 保持高度和位置,使用GPS进行移动 PosHold s + Y 类似于游荡,但当棍子未居中时手动滚动和投掷 RTL A A Y 返回高于起飞位置,也可能包括着陆 Simple/Super Simple Y 飞行模式的附加功能,使用飞行员视图而不是偏航方向 SmartRTL A A Y RTL,但跟踪回家的路径 Sport s s Alt hold,但在摇杆居中时保持俯仰和滚动 Stabilize – + 自调平横滚和俯仰轴 SysID – + 特殊诊断/建模模式 Throw A A Y 在投掷起飞后保持位置 Turtle – – 允许反转和旋转相邻的电机对,以便将撞车、倒置的车辆翻转回来 ZigZag A A Y 适用于作物喷洒
Symbol Definition – 手动控制 + 带极限和自水平的手动控制 s 飞行员控制爬升率 A 自动控制
一般来说,当你第一次开始使用直升机时,你应该按照下面列出的顺序完成飞行模式,确保在进入下一个模式之前对每种模式都感到满意:
Stabilize
Alt Hold
Loiter
RTL (Return-to-Launch)
Auto
以下为常用模式
(根据Flight Modes — Copter documentation翻译整理)
1.稳定模式
稳定模式允许手动驾驶无人机,但可以自行调平横滚和俯仰轴。
提示:
如果你正在学习飞行,试试Alt Hold或LOITER,而不是稳定。如果你不需要一次集中精力控制太多的控件,那么坠机会更少。
警告:
虽然稳定模式不一定需要GPS,但在紧急情况下切换到RTL则需要GPS。确保在布设之前有可靠的位置估计,通常由具有足够HDOP的3D GPS定位提供。
概述:
操作者的横滚和俯仰输入控制无人机的倾斜角度。当操作者释放横滚和俯仰杆时,无人机自动调平。
操作者需要定期输入横滚和俯仰命令,以使无人机在被风推动时保持在原位。
操作者的偏航输入控制航向的变化率。当操作者释放偏航杆时,无人机将保持其当前航向。
操作者的油门输入控制平均电机速度,这意味着需要不断调整油门以保持高度。如果驾驶员完全踩下油门,电机将达到其最低速度(MOT-SPIN-ARMED),如果无人机正在飞行,则会失去姿态控制并翻滚。但是,可以通过启用AirMode来更改此行为。
发送到电机的油门会根据无人机的倾斜角度自动调整(随着无人机倾斜程度的增加而增加),以减少操作者在无人机姿态变化时必须进行的补偿。
如果自动驾驶仪无法控制无人机,请始终切换到手动模式,例如稳定。保持对无人机的控制是你的责任。
使用自动调谐可以自动确定最佳稳定和速率PID值。强烈建议在无人机上运行自动调谐,而不是手动调整PID。
其他重要参数
ANGLE_MAX控制最大倾斜角度,默认为4500(即45度)
ANGLE_RATE_MAX控制横滚和俯仰轴中请求的最大旋转速率,默认为18000(180度/秒)。
ACRO_Y_RATE根据操作者的偏航输入控制无人机旋转的速度。当偏航摇杆完全保持在左侧或右侧时,默认值4.5指示200度/秒的旋转速率。值越高,旋转速度越快。
2.高度保持模式
在高度保持模式下,无人机保持一致的高度,同时允许正常控制横摇、俯仰和偏航。本页包含有关使用和调整alt hold的重要信息。
概述:
当选择高度保持模式(也称为AltHold)时,油门自动控制以保持当前高度。横滚、俯仰和偏航的操作与稳定模式下相同,这意味着操作者直接控制横滚和俯仰倾斜角度以及航向。
自动高度保持是许多其他飞行模式(漫游、运动等)的一项功能,因此此处的信息也与这些模式有关。
自动驾驶仪使用测量气压的气压计作为确定高度(“气压高度”)的主要手段,如果由于极端天气导致飞行区域内的气压发生变化,无人机将跟踪气压变化,而不是实际高度。安装并启用后,下向测距仪(如激光雷达或声纳)将自动提供更精确的高度维护,达到传感器的极限。
控制:
操作者可以用油门杆控制无人机的爬升或下降速度。
如果油门杆处于中间位置(40%-60%),无人机将保持当前高度。
在中油门的死区之外(即低于40%或高于60%),无人机将根据摇杆的偏转下降或爬升。当摇杆完全放下时,无人机将以2.5m/s的速度下降,如果在最顶端,它将以2.5m/s的速度爬升。这些速度可以通过PILOT_ SPEED_ UP和PILOT_ SPEED_ DN参数进行调整。用于建立这些速度的加速度由PILOT_ ACCEL_ Z设置。
死区的大小可以通过THR_ DZ参数进行调整。该参数的值应介于“0”和“400”之间,“0”表示无死区。“100”将在油门中段以上和以下产生10%的死区(即死区从油门杆位置的40%延伸到60%)。
无人机允许在高度保持模式下进行准备和解除准备。解除防护时,无人机可能需要在着陆位置休息几秒钟,以便“着陆检查器”在您能够解除防护之前验证无人机是否已着陆。
调谐:
高度保持P用于将高度误差(期望高度和实际高度之间的差值)转换为期望的爬升或下降率。更高的速率将使其更积极地尝试保持其高度,但如果设置得太高,则会导致油门响应急促。
油门速率(通常不需要调整)将所需的爬升或下降速率转换为所需的上升或下降加速度。
油门加速度PID增益将加速度误差(即期望加速度和实际加速度之间的差值)转换为电机输出。如果修改这些参数,则应保持P与I的1:2比率(即I是P大小的两倍)。这些值永远不应该增加,但对于非常强大的无人机,您可以通过将两者减少50%(即P到0.5,i到1.0)来获得更好的响应。
使用dataflash日志验证AltHold性能:
查看高度保持性能的最佳方法是从飞行中下载一个dataflash日志,然后用任务规划器打开它,绘制气压计高度、所需高度和基于惯性导航的高度估计。根据版本和电路板的不同,这些数据列略有不同。
CTU的BAlt(气压高度)、DAlt(期望高度)和alt(惯性导航高度估计)
常见问题:
一旦保持高度,高振动会导致无人机快速爬升。有关如何测量和减少振动的详细信息,另行介绍。
无人机缓慢下降或爬升,直到操作者在稳定状态下重新控制。通常这是由于油门杆未处于中间位置造成的。这种情况通常发生在操作者从手动飞行模式(如稳定)切换到AltHold时,无人机不悬停在中间油门。请参阅与设置中间油门位置相关的另行介绍。
当AltHold接通时,电机似乎停止了一会儿,但很快就会恢复。这通常发生在操作者在快速爬升时进入高度保持时。目标高度是在操作者切换到alt hold(高度保持)时设置的,但由于无人机正在快速上升,它会飞到目标上方。然后,攻击性高度保持控制器通过瞬间将电机降至接近最小值做出响应,直到无人机开始回落到目标高度。解决方法是在无人机在稳定高度飞行时进入AltHold。
气压变化会导致无人机在较长时间内上下漂移几米,或者地面军事系统上显示的高度不准确几米,包括偶尔出现的负高度(指低于原始高度的高度)。
当无人机在高速向前飞行后平飞时,瞬时高度损失为1m~2m。这是由空气动力学效应引起的,该效应导致在安装自动驾驶仪的无人机顶部形成瞬时低压气泡,从而导致高度保持控制器认为其正在爬升,因此其通过下降作出响应。虽然增加EK2_ALT_M_NSE参数会降低影响,但增加上述常见问题1的变化,但目前无法治愈这种行为。EK2_ALT_M_NSE参数的范围为0.1到10.0,允许增量为0.1。
当无人机接近地面或着陆时,高度保持变得不稳定。这可能是由于气压计受到支柱清洗产生的压力变化的影响。解决方案是将自动驾驶仪移出螺旋桨清洗效果,或将其屏蔽在适当通风的外壳内。
由于光线照射气压计而引起的高度突然变化。
足够的功率:
无人机具有足够的可用功率非常重要。如果没有这一点,高度保持和姿态控制器可能需要比一个或多个电机可用的功率更多的功率,并将被迫牺牲一些控制,这可能导致姿态或高度损失。
理想情况下,无人机应该能够在约50%的油门(中杆)下悬停,任何高于70%的都是危险的。
3.悬停模式
漫游模式自动尝试保持当前位置、航向和高度。操作者可以在漫游模式下驾驶无人机,就像在更手动的飞行模式下一样,但当释放操纵杆时,无人机将减速至停止并保持位置。
良好的GPS锁定、罗盘上的低磁干扰和低振动对于实现良好的漫游性能都很重要。
控制:
操作者可以用操纵杆控制无人机的位置。
水平位置可以使用横滚和俯仰控制棒进行调整,默认最大水平速度为5m/s(有关如何调整,请参阅下面的调整部分)。当操作者释放操纵杆时,无人机将减速至停止。
与在AltHold模式下一样,可以使用油门控制杆控制高度
可以使用偏航控制杆设置航向
无人机可以在漫游模式下待命,但只有在GPS具有3D锁定且HDOP降至2.0以下时。更多关于LED图案的详细信息。
调谐:
漫游模式包含AltHold模式的高度控制器。有关调整AltHold的详细信息,请参阅另行介绍。
游荡参数:
LOIT_速度:最大水平速度(cm/s)(即1250=12.5m/s)
LOIT_ACC_MAX:最大加速度,单位为厘米/秒/秒。数值越高,无人机加速和停止速度越快
LOIT_ANG_MAX:最大倾斜角度,单位为度(即30度)。默认情况下,该值为零,这会导致使用PSC_ANGLE_MAX或ANGLE_MAX参数的值
LOIT_BRK_ACCEL:刹车时的最大加速度(以厘米/秒/秒为单位)(即操作者将操纵杆移到中心)。较高的值将更快地停止无人机
LOIT_BRK_延迟:一旦操作者将摇杆居中,制动开始前的延迟(以秒为单位)
LOIT_BRK_JERK:制动时加速度的最大变化,单位为厘米/秒/秒。数值越大,无人机达到最大制动角的速度越快,数值越小,制动越平稳
PSC_POSXY_P:(在上面的屏幕截图右上角显示为“位置XY(距离到速度)”)将水平位置误差(即所需位置和实际位置之间的差异)转换为朝向目标位置的所需速度。通常不需要对此进行调整
PSC_VELXY_P(显示为“速度XY(Vel to Accel)”)将朝向目标的所需速度转换为所需加速度。由此产生的期望加速度成为倾斜角度,然后传递给稳定模式使用的相同角度控制器。通常不需要对此进行调整
常见问题:
无人机旋转(也称为“盥洗盆”)。这通常是由罗盘问题引起的,最有可能是自动驾驶仪下的电力电缆的磁干扰。运行compassmot或购买GPS+compass模块可以正常解决这一问题。其他可能性包括在罗盘校准过程中设置的错误罗盘偏移。
一旦Loitter接合,无人机就会以错误的方向起飞。原因与#2相同,只是罗盘误差大于90度。请尝试上述建议以解决此问题。
使用dataflash日志验证Loitter性能
通过从航班下载dataflash日志,然后用任务规划器打开它,绘制NTUN消息的DesVelX vs VelX和Desvly vs VelY,可以查看漫游者的水平性能。在性能良好的无人机中,实际速度将跟踪所需速度,如下所示。X=纬度(正=北移,负=南移),Y=经度(正=东,负=西)。
检查高度保持性能与AltHold模式相同。
4.RTL模式
RTL模式(返回发射模式)将无人机从其当前位置导航到悬停在初始位置上方。RTL模式的行为可以由几个可调参数控制。本页介绍如何使用和自定义RTL模式。
概述:
当选择RTL模式时,无人机将返回原位。在返回家园之前,无人机将首先上升到RTL_高度,如果当前高度高于RTL_高度,则保持当前高度。RTL_高度的默认值为15m。
RTL模式需要可靠的位置估计才能正常工作,通常由GPS和罗盘提供。默认的预准备检查将确保获得具有足够HDOP的3D GPS锁,并且mag在准备前按预期工作。使用非默认报警检查时,确保您有足够的GPS锁定和/或可靠的位置估计,以便RTL按预期执行。
RTL将命令无人机返回初始位置,这意味着它将返回其待命位置。因此,初始位置始终应为无人机的实际GPS起飞位置,无障碍且远离人群。对于无人机,如果你得到GPS锁,然后准备你的无人机,初始位置是无人机准备时的位置。这意味着,如果你在无人机上执行RTL,它将返回其待命位置。
警告:
在RTL模式下,自动驾驶仪使用测量气压的气压计作为确定高度(“气压高度”)的主要手段,如果飞行区域内气压发生变化,无人机将跟踪气压变化而不是实际高度(除非您在离地面20英尺以内,并且安装并启用了声纳)。
选项(用户可调参数)
RTL_高度:返回发射前无人机将移动到的最低高度。
设置为零以返回当前高度。
返回高度可以设置为1到8000厘米。
默认返回高度默认为15米(1500)
RTL_ALT_FINAL:无人机在“返回发射”的最后阶段或完成任务后将移动到的高度。
设置为零以自动降落无人机。
最终返回高度可从0调整到1000厘米。
RTL_LOIT_时间:在开始最终下降之前在“原点”位置上方悬停/暂停的时间(毫秒)。
“游荡”时间可以从0毫秒调整到60000毫秒。
WP_YAW_行为:设置自动驾驶仪在任务和RTL期间如何控制“偏航”。
0=从不改变偏航。
1=面向下一个航路点,包括在RTL期间面向原点。
2=面向下一个航路点,RTL除外(即在RTL期间,无人机将保持指向其最后一个航向)
着陆速度:着陆最后阶段的下降速度,单位为厘米/秒。
着陆速度可在每秒20到200厘米之间调节。
RTL_gramb_MIN:在RTL的第一阶段,无人机将至少爬升这么多米。默认情况下,该值为零。(仅无人机-3.3及以上)
RTL_速度:无人机返回家园的水平速度(cm/s)。默认情况下,该值为零,意味着它将使用WPNAV_速度。(仅无人机-3.4及更高版本)
RTL_CONE_坡度:定义原点上方倒锥的坡度,用于限制无人机从原点附近RTL时的爬坡量。低值会导致较宽的圆锥体,这意味着无人机爬坡较少,高值会导致无人机爬坡较多。(支持无人机-3.4及更高版本)
其他导航设置也会影响RTL模式:
WPNAV_加速
WPNAV_SPEED_DN
WPNAV_加速
要使用RTL,需要在准备和起飞前实现GPS锁定(蓝色GPS LED和蓝色APM LED亮起,不闪烁),以建立起始或发射位置。
着陆和重新配置无人机将重置原点,这是在机场飞行的一个重要功能。
如果你在飞行中第一次得到锁,你的家将被设置在锁的位置。
如果您将RTL_ALT设置为非0的数字,则返回时将转到并保持该高度。
RTL使用WPNAV_速度来确定其移动速度。
一旦无人机到达原位,无人机将暂停RTL_LOIT_TIME毫秒,超时(自动着陆),然后着陆。
5.自动模式
在自动模式下,无人机将遵循自动驾驶仪中存储的预编程任务脚本,该脚本由导航命令(即航路点)和“do”命令(即不影响无人机位置的命令,包括触发相机快门)组成。
概述:
自动模式包括AltHold模式的高度控制和Loiter模式的位置控制,在这些模式飞行良好之前不应尝试。所有相同的要求均适用,包括确保振动水平和罗盘干扰水平可接受,以及GPS运行良好,包括返回低于2.0的HDOP。
控制:
自动应设置为飞行模式开关上的飞行模式之一。
在进入自动模式之前,必须启动无人机。有关如何准备无人机的详细信息,请参阅准备发动机。
AUTO_OPTIONS参数可用于改变这种行为,允许在自动模式下进行准备,和/或允许在进入自动模式时启动任务起飞命令,即使油门尚未升起。
如果在无人机在地面时开始任务,操作者应确保油门降下,然后切换到自动飞行模式,然后提高油门。油门升到零度以上时,无人机将开始执行任务。
如果从空中开始任务,任务将从第一个命令开始,即飞行模式开关移动到自动的那一刻。如果任务中的第一个命令是起飞命令,但无人机已经高于起飞命令的高度,则起飞命令将被视为完成,无人机将移动到下一个航路点。
在任何时候,操作者都可以通过将飞行模式开关返回到另一个飞行模式(如稳定或游荡)来重新控制自动驾驶仪。如果操作者再次切换到自动,任务将从最后一个命令恢复。
在任务期间,操作者的横滚、俯仰和油门输入被忽略,但偏航操纵杆可以覆盖偏航。例如,这允许操作者在无人机执行任务时对准无人机机头(可能有一个硬安装的摄像头)。当无人机通过下一个航路点时,自动驾驶仪将尝试重新进行偏航控制。
可以输入任务,通过任务规划器的飞行计划屏幕进行修改。请参阅任务命令列表,获取受支持命令的完整列表以及每个命令的简短描述。
结束任务:
任务通常应具有RTL作为其最终命令,以确保无人机在任务完成后返回。或者,最终命令可以是具有不同位置的土地。如果没有最终RTL或着陆命令,无人机将简单地停在最终航路点,操作者将需要用发射器重新控制。
请记住,当使用RTL时,无人机将返回“主”位置,即无人机待命的位置。
当无人机在任务结束时着陆时,无人机应自动解除防护,但有时无人机可能感觉不到着陆,操作者可能需要踩下油门,以另一种模式起飞,如稳定或游荡,然后手动解除无人机防护。
调谐:
自动模式包括AltHold模式的高度控制和Loiter模式的位置控制。
无人机的最大水平速度可以通过任务规划器的配置/调整>>无人机Pids屏幕上的速度(也称为WPNAV_速度)参数进行调整(见上面的蓝色方框)。默认值为500,即5m/s。在无法同时保持高度和水平速度之前,典型的无人机可以达到10m/s~13m/s(即1000~1300)的最高速度。
垂直速度的上升和下降可以通过速度上升(WPNAV_ Speed_ up)和速度Dn(WPNAV_ Speed_ Dn)参数进行类似的调整。
半径允许您控制在航路点被视为“完成”并且无人机移动到下一个航路点之前,无人机必须到达准确航路点位置的距离。这仅适用于航路点命令包含1秒或更长延迟的情况。该航路点毫不延迟地被视为“快速航路点”,一旦其追逐的中间目标到达该航路点,无人机将开始向下一个航路点前进。该中间目标可以在无人机前方10m或更高(其在无人机前方的距离随着速度参数的增加而增加)。
文章出处登录后可见!