目录
一、理论基础
自相关谱估计、周期图法谱估计、协方差法谱估计、Burg算法谱估计和修正协方差谱估计是常见的信号谱估计方法,用于分析信号的频谱信息。本文将详细介绍这几种方法的原理和特点。
1.1自相关谱估计
自相关谱估计是一种最简单的谱估计方法,它基于信号的自相关函数来估计信号的频谱。自相关函数表示信号与其自身经过一定时间延迟后的相似程度,其峰值对应于信号的周期,因此可以用于估计信号的频率成分。
自相关谱估计的具体步骤如下:
计算信号的自相关函数。
对自相关函数进行傅里叶变换,得到信号的频谱。
自相关谱估计的优点是计算简单,但其缺点是精度较低,对噪声敏感。
1.2周期图法谱估计
周期图法谱估计是一种基于周期性信号模型的谱估计方法。它认为信号是由若干个周期信号叠加而成,因此可以通过将信号分解为多个周期信号,并对每个周期信号进行傅里叶变换,得到信号的频谱。具体来说,周期图法谱估计的步骤如下:
将信号分解为若干个周期信号,例如通过将信号按照周期长度进行切分。
对每个周期信号进行傅里叶变换,得到周期信号的频谱。
将所有周期信号的频谱叠加起来,得到信号的频谱估计结果。
周期图法谱估计的优点是对周期性信号估计精度高,但其缺点是对非周期性信号估计精度较低。
1.3协方差法谱估计
协方差法谱估计是一种基于统计模型的谱估计方法,它认为信号是一个随机过程,可以通过计算信号的样本协方差函数来估计信号的频谱。具体来说,协方差法谱估计的步骤如下:
计算信号的样本协方差函数。
对协方差函数进行傅里叶变换,得到信号的频谱估计结果。
协方差法谱估计的优点是精度较高,但其缺点是计算复杂度较高。
1.4burg算法谱估计
Burg算法谱估计是一种基于递归最小二乘法的谱估计方法,它通过迭代计算自回归(AR)模型的系数来估计信号的频谱。具体来说,Burg算法谱估计的步骤如下:
初始化AR模型的系数。
计算AR模型的预测误差和功率谱。
更新AR模型的系数,使预测误差和功率谱最小。
重复步骤2和步骤3,直到收敛。
Burg算法谱估计的优点是精度较高,但其缺点是计算复杂度较高,且对噪声敏感。
1.5修正协方差谱估计
修正协方差谱估计是一种基于协方差法谱估计的改进方法,它通过对协方差函数进行修正,来提高谱估计的精度。具体来说,修正协方差谱估计的步骤如下:
计算信号的样本协方差函数。
对协方差函数进行修正,例如通过对协方差函数进行平滑、截断等操作。
对修正后的协方差函数进行傅里叶变换,得到信号的频谱估计结果。
修正协方差谱估计的优点是精度较高,且对噪声不敏感,但其缺点是需要对协方差函数进行修正,且修正方法的选择可能影响谱估计结果。
二、核心程序
%画图
figure(2);
stem(rx_d,'r');
title('估计自相关与真实自相关比较');
xlabel('n');
ylabel('rx');
grid on;
hold on;
stem(rx0,'b');
legend('估计自相关','真实自相关');
%用x进行功率谱估计,即周期图法
p0 = fft(xn,512);
p0 = p0(1:N);
p0 = (abs(p0)).^2./length(xn);
p0 = 10*log10(p0);
%自相关法
[a1,err1]=acm(xn,4);
p1 = estm_p(sqrt(err1),a1);
%协方差法
[a2,err2]=covm(xn,4);
p2 = estm_p(sqrt(err2),a2);
%burg算法
[g3,err3]=burg(xn,4);
a3 = gtoa(g3);
p3 = estm_p(sqrt(err3),a3);
%修正协方差法
[a4,err4]=mcov(xn,4);
p4 = estm_p(sqrt(err4),a4);
%画图比较
f=1./N:1./N:1;
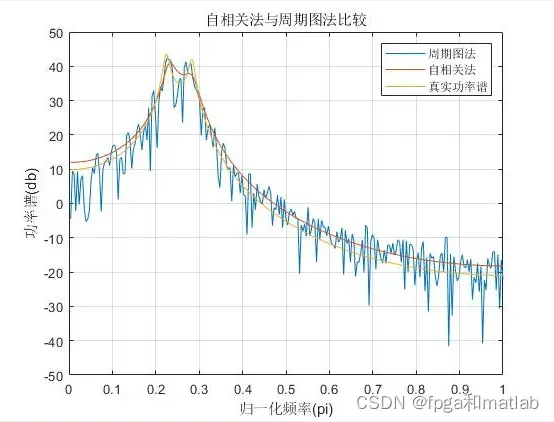
figure(3);
plot(f,p0,f,p1,f,p);
title('自相关法与周期图法比较');
xlabel('归一化频率(pi)');
ylabel('功率谱(db)');
grid on;
legend('周期图法','自相关法','真实功率谱');
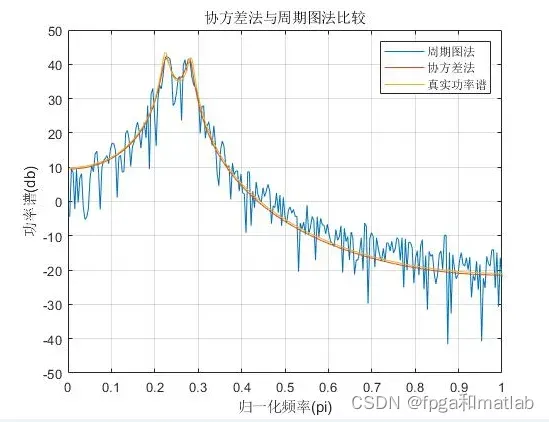
figure(4);
plot(f,p0,f,p2,f,p);
title('协方差法与周期图法比较');
xlabel('归一化频率(pi)');
ylabel('功率谱(db)');
grid on;
legend('周期图法','协方差法','真实功率谱');
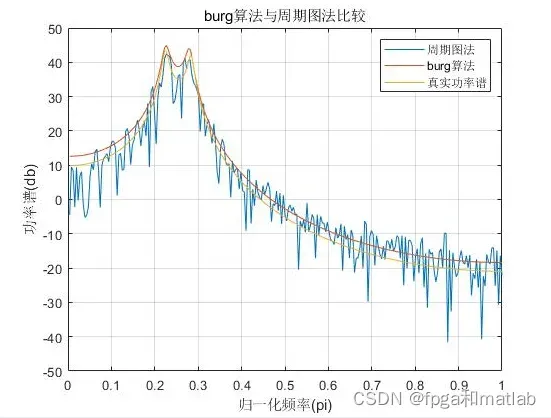
figure(5);
plot(f,p0,f,p3,f,p);
title('burg算法与周期图法比较');
xlabel('归一化频率(pi)');
ylabel('功率谱(db)');
grid on;
legend('周期图法','burg算法','真实功率谱');
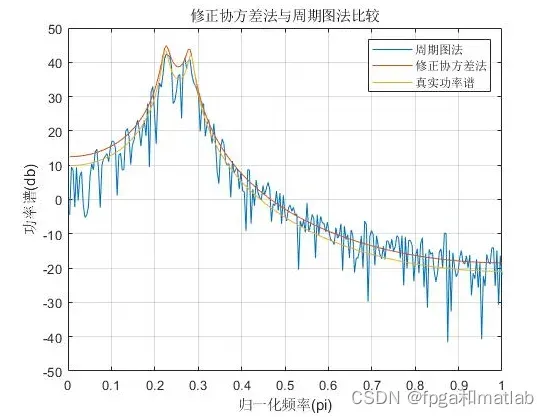
figure(6);
plot(f,p0,f,p4,f,p);
title('修正协方差法与周期图法比较');
xlabel('归一化频率(pi)');
ylabel('功率谱(db)');
grid on;
legend('周期图法','修正协方差法','真实功率谱');
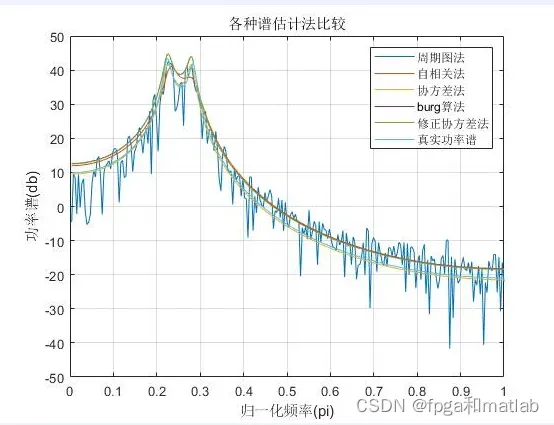
figure(7);
plot(f,p0,f,p1,f,p2,f,p3,f,p4,f,p);
title('各种谱估计法比较');
xlabel('归一化频率(pi)');
ylabel('功率谱(db)');
grid on;
legend('周期图法','自相关法','协方差法','burg算法','修正协方差法','真实功率谱');
UP188三、仿真结论
文章出处登录后可见!