一直对np的线性运算不太清晰,正好上课讲到了,做一个笔记整个理解一下
1.向量和矩阵
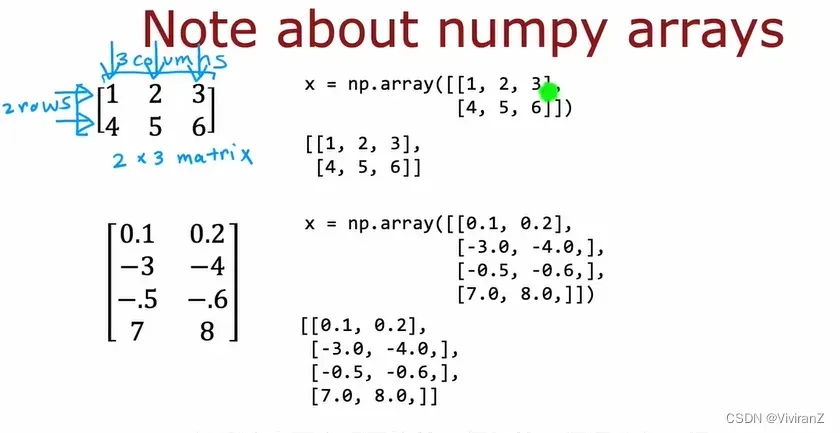
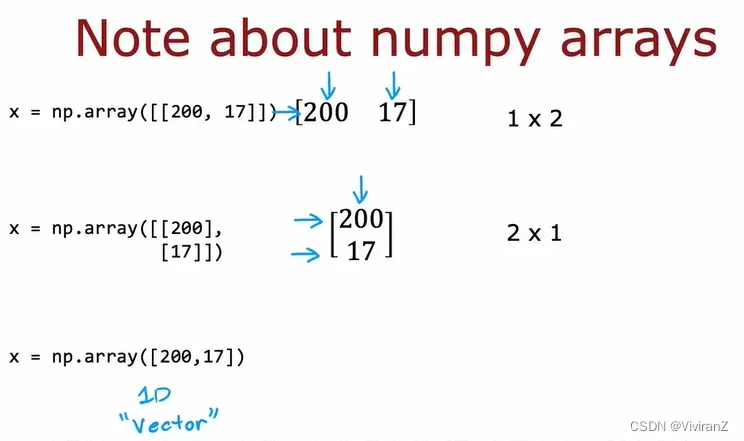
在numpy中,一重方括号表示的是向量vector,vector没有行列的概念。二重方括号表示矩阵matrix,有行列。
代码显示如下:
import numpy as np
a=np.array([1,2,3])
a.shape
#(3,)
b=np.array([[1,2,3],[3,4,5]])
b.shape
#(2, 3)
c=np.array([[1],[2],[3]])
c.shape
#(3, 1)即使[1,2,3]、[[1,2,3]]看起来内容一样 使用过程中也会有完全不一样的变化。下面以向量乘法为例解释。
2.向量和向量乘法
1.* 对应对应位置相乘
普通的*:在numpy里表示普通的对应位置相乘,注意相乘的两个向量、矩阵要保证维数相同
a1=np.array([1,2,3])
a2=np.array([1,2,3])
a1*a2
#array([1, 4, 9])
b1=np.array([[1,2,3]])
b2=np.array([[1,2,3]])
b1*b2
#array([[1, 4, 9]])
b1=np.array([[1,2,3],[3,4,5]])
b2=np.array([[1,2,3],[3,4,5]])
b1*b2
# array([[ 1, 4, 9],
# [ 9, 16, 25]])2.广播机制
如果单纯出现维数对不上,python会报error
b1=np.array([[1,2]])
b2=np.array([[1,2,3]])
b1*b2
#operands could not be broadcast together with shapes (1,2) (1,3)
但是,还有一种情况会出现乘出来一个好大的矩阵,这个情况常出现在无意之中把行、列的数字搞反的情况下。被称为广播机制,需要两个乘子都有一个维数是1,如果是对不上且不为1就会报错
Numpy中的广播机制,你确定正确理解了吗? – 腾讯云开发者社区-腾讯云
在普通的对应位置相乘,会出现
a1=np.array([1,2,3])
a3=np.array([[1],[2],[3]])
a1*a3#broadcast together
# array([[1, 2, 3],
# [2, 4, 6],
# [3, 6, 9]])倒过来也会出现
a1=np.array([1,2,3])
a3=np.array([[1],[2],[3]])
a3*a1#broadcast together
# array([[1, 2, 3],
# [2, 4, 6],
# [3, 6, 9]])3.向量点乘np.dot
必须要(行向量,列向量)形式的输入
a1=np.array([1,2,3])
a3=np.array([[1],[2],[3]])
np.dot(a3,a1)
#array([14])
#ValueError: shapes (3,1) and (3,) not aligned: 1 (dim 1) != 3 (dim 0)都是行向量,不行
b1=np.array([[1,2,3]])
b2=np.array([[1,2,3]])
np.dot(b1,b2)
#shapes (1,3) and (1,3) not aligned: 3 (dim 1) != 1 (dim 0)都是列向量,触发广播机制
a1=np.array([[1,2,3]])
a3=np.array([[1],[2],[3]])
np.dot(a3,a1)
# array([[1, 2, 3],
# [2, 4, 6],
# [3, 6, 9]])3.矩阵和向量乘法
1.对应位置相乘
如果单纯采用*的方式进行矩阵和向量乘法,那就是广播机制
矩阵+向量
A1=np.array([[1,2,3],[2,3,4]])
b1=np.array([1,2,3])
A1*b1 #broadcast together
# array([[ 1, 4, 9],
# [ 2, 6, 12]])对应的向量如果是矩阵形式,结果相同
A2=np.array([[1,2,3],[2,3,4]])
b2=np.array([[1,2,3]])
A2*b2 #broadcast together
# array([[ 1, 4, 9],
# [ 2, 6, 12]])
相似的,如果维数对不上,不会触发广播机制
A3=np.array([[1,2,3],[2,3,4]])
b3=np.array([[1],[2],[3]])
A3*b3 #operands could not be broadcast together with shapes (2,3) (3,1) 2.矩阵乘法
如果真正想要算矩阵*向量的矩阵乘法,要用np.dot
A4=np.array([[1,2,3],[2,3,4]])
b4=np.array([1,2,3])
np.dot(A4,b4)#dot product
#array([14, 20])列向量也有类似结果
A4=np.array([[1,2,3],[2,3,4]])
b4=np.array([[1],[2],[3]])
np.dot(A4,b4)#dot product
# array([[14],
# [20]])4.矩阵矩阵乘法:
1.直接相乘
同样,也是对应位置相乘
A4=np.array([[1,2,3],[2,3,4]])
B4=np.array([[1,2,3],[4,5,6]])
A4*B4
# array([[ 1, 4, 9],
# [ 8, 15, 24]])有广播机制
A4=np.array([[1,2,3],[2,3,4]])
B4=np.array([[1,2,3]])
A4*B4
# array([[ 1, 4, 9],
# [ 2, 6, 12]])2.np.dot:
需要第一个的列数和第二个的行数相对应
A4=np.array([[1,2,3],[2,3,4]])
B4=np.array([[1,2,3],[4,5,6]])
np.dot(A4,B4.T)
# array([[14, 32],
# [20, 47]])
A5=np.array([[1,2,3],[2,3,4]])
B5=np.array([[1,2,3],[4,5,6],[7,8,9]])
np.dot(A5,B5)
# array([[30, 36, 42],
# [42, 51, 60]])对不上会报错
A4=np.array([[1,2,3],[2,3,4]])
B4=np.array([[1,2,3],[4,5,6]])
np.dot(A4,B4)
# shapes (2,3) and (2,3) not aligned: 3 (dim 1) != 2 (dim 0)5.np.dot 和np.matmul的区别
Numpy中np.dot与np.matmul的区别_ACTerminate的博客-CSDN博客_numpy dot matmul
主要参考以上博客。
1.在二维(矩阵中),二者是一致的
2.在三维(张量中),二者有差别。
以原博客中的例子为例
a = np.array([i for i in range(12)]).reshape([2,2,3])
b = np.array([i for i in range(12)]).reshape([2,3,2])
"""
a
[[[ 0 1 2]
[ 3 4 5]]
[[ 6 7 8]
[ 9 10 11]]]
b
[[[ 0 1]
[ 2 3]
[ 4 5]]
[[ 6 7]
[ 8 9]
[10 11]]]
"""
np.dot很清晰,就是a的每一行分别和b的两层乘起来,于是2*2输出了四个“矩阵”(表示成4维的常数):
"""
a11= [ 0 1 2]
a12= [ 3 4 5]
a21= [ 6 7 8]
a22= [ 9 10 11]
b
[[[ 0 1]
[ 2 3]
[ 4 5]]
[[ 6 7]
[ 8 9]
[10 11]]]
c[:,i,j]=aij*b
"""
如:
[ 10, 13] =[0 1 2]*[[ 0 1]
[ 2 3]
[ 4 5]]
[ 28, 31]=[0 1 2]*[[ 6 7]
[ 8 9]
[ 10 11]]
>>> np.dot(a,b)
array([[[[ 10, 13],
[ 28, 31]],
[[ 28, 40],
[100, 112]]],
[[[ 46, 67],
[172, 193]],
[[ 64, 94],
[244, 274]]]])
>>> np.dot(a,b).shape
(2, 2, 2, 2)
np.matmul的结果:
>>> np.matmul(a,b)
array([[[ 10, 13],
[ 28, 40]],
[[172, 193],
[244, 274]]])
>>> np.matmul(a,b).shape
(2, 2, 2)
可以看出,如果把np.dot视为8行、matmul视为4行的话,matmul正好取第1、3、6、8四行,也就是第一层的前两行和第二层的后两行……
直观理解,ok
文章出处登录后可见!