一、图像分割概述
• 定义
是指根据灰度、彩色、空间纹理、几何形状等特征把图像划分
成若干个互不相交的区域,使得这些特征在同一区域内表现出一致
性或相似性,而在不同区域间表现出明显的不同
分割出来的区域应该同时满足:
(1)分割出来的图像区域的均匀性和连通性。
• 均匀性是指该区城中的所有像素点都满足基于灰度、纹理、彩
色等特征的某种相似性准则;
• 连通性是指该区城内存在连接任意两点的路径。
(2)相邻分割区域之间针对选定的某种差异显著性。
(3)分割区域边界应该规整,同时保证边缘的空间定位精度。
图像分割的特点:
• 是图像处理中最困难的问题之一;
• 是图像分析的第一步,是计算机视觉的基础,是图像理解的重要组成部分;
• 被认为是计算机视觉中的一个“瓶颈”;
• 虽然没有通用方法,但是对其一般性规律形成基本共识,产生了相当多的研
究成果和方法。
• 分类
根据图像分割原理分类:
• 原理:图像区域内部的像素一般具有灰度相似性,而在区域之间的边界上一
般具有灰度不连续性。据此分为:
− 利用区域间灰度不连续性的边界方法:
− 利用区域内灰度相似性的基于区域的算法:
根据分割过程中处理策略分类:
− 并行算法:计算速度比较快
− 串行算法:对噪声的抵抗力比较强
二、边界分割技术
• 边缘检测
边缘:
• 各类图像中,由于不同物体对电磁波的反射特性不同,在物体与背景、不同
物体的交接处,图像的灰度将发生明显的变化,在图像中产生了边缘。
边缘检测:
• 利用灰度的变化信息检测物体边缘,得到物体的轮廓,实现图像分割。
• 边缘检测是所有基于边界的分割方式的第一步。
边缘检测步骤
① 需要先去噪,进行图像平滑处理
• 平滑模板
• 中值滤波
② 检测边缘点:从图像提取边缘候选点
• 边缘检测算子
③ 边缘定位:从边缘候选点中筛选。
• 阈值化处
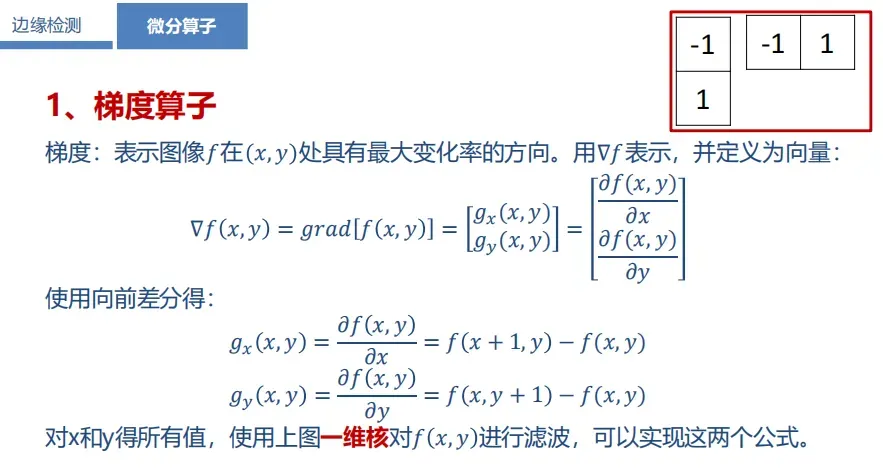
• 微分算子
① 梯度对应一阶导数,梯度算子是一阶导数算子
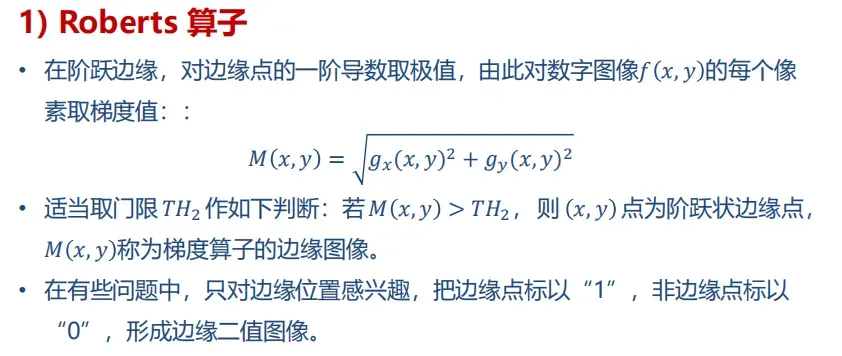
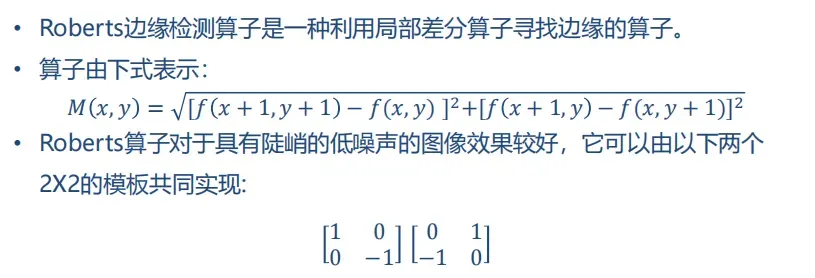
• Roberts 算子
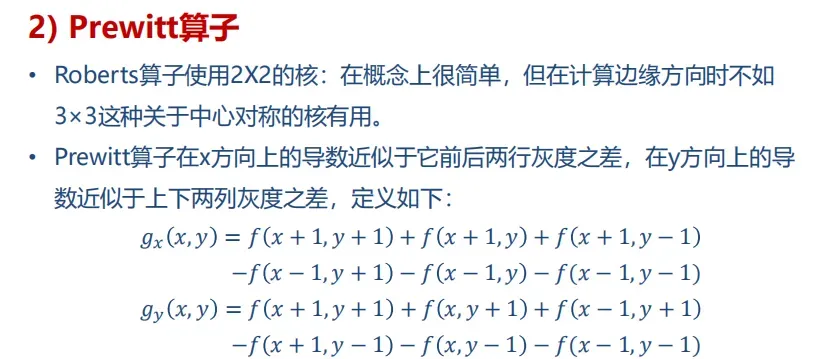
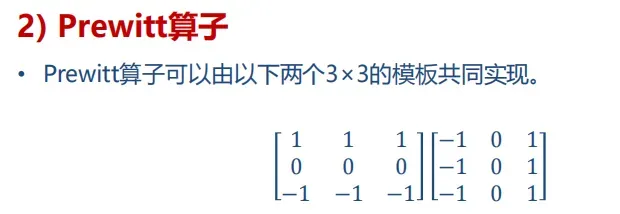
• Prewitt算子
• Sobel算子
② 二阶导数算子:
• LoG算子
Roberts边缘检测算子是一种利用局部差分算子寻找边缘的算子
Prewitt算子对于噪声较小的阶跃形边界的提取非常有效。
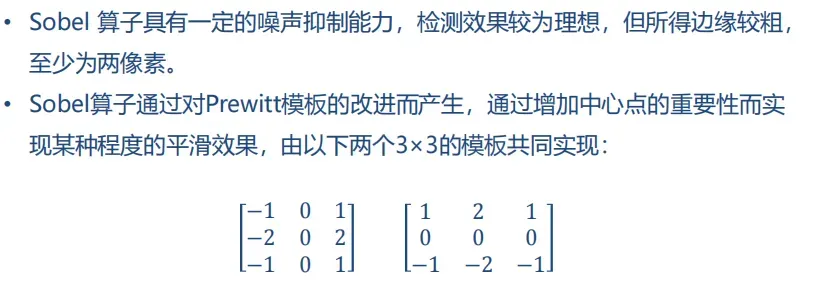
Sobel 算子具有一定的噪声抑制能力,检测效果较为理想,但所得边缘较粗,至少为两像素。
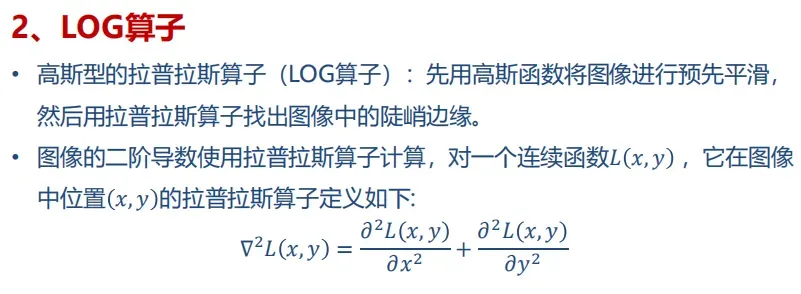
拉普拉斯算子是无方向性的算子,它比前面几个梯度算子的计算量要小
三、区域分割技术
• 原理与分类
基于阈值选取的图像分割方法
• 是提取目标物体与背景在灰度上的差异,把图像分为具有不同灰度级的目标
区域和背景区域的组合。
• 阈值法计算较为简单,并且可以用封闭和连通的边界定义不交叠的区域,是
图像分割中最有效且实用的技术之一。
• 根据获取最优分割阈值的途径可以把阈值法分为
• 全局阙值法
• 动态阈值法
• 局部阈值法等
影响波谷特性的关键因素(重要性由大到小):
① 波峰间的间隔:波峰离得越远,分隔这些模式的机会越好;
② 图像中的噪声内容:噪声越大,模式越宽;
③ 目标和背景的相对大小;
④ 光源的均匀性;
⑤ 图像反射性质的均匀性
峰谷法:
• 优点:峰谷法直接利用图像的灰度直方图,实现简单,运算量也小
• 缺点:不适用于两峰值相差极大,有宽且平谷底的图像
• 全局阈值
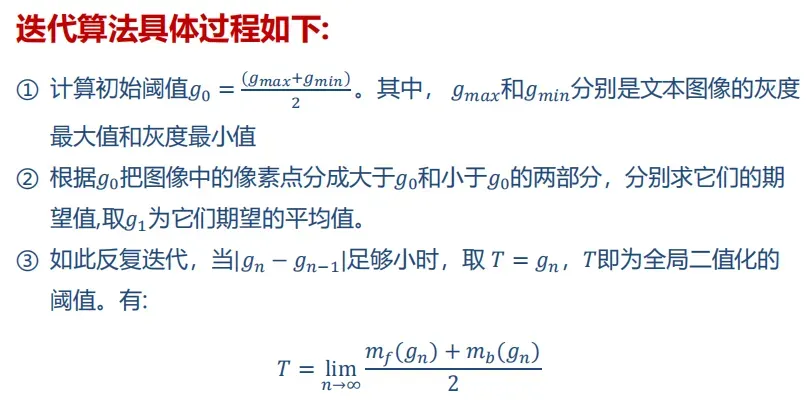
迭代算法
• 是一种全局阈值二值化方法。
• 该方法首先选取一初始阈值
其值取为图像的最大灰度值与最小灰度值的均值,根据该阈值将图像二值化为目标与背景,
• 然后以目标和背景的平均期望值作为新的阈值,对图像重新二值化
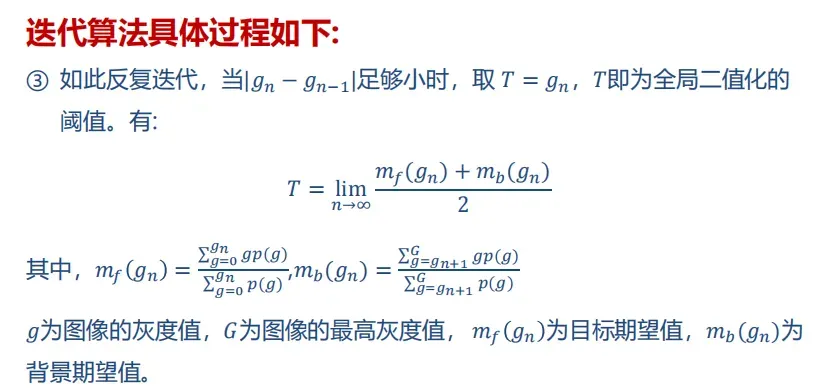
• 如此不断迭代
• 当阈值不再变化时,停止迭代。
一般迭代几次后即可达到稳定状态。
文章出处登录后可见!