python机器人库(robotics-toolbox-python)的运用
Python 机器人库的运用
前言
找了半天发现网上关于python机器人库的资料很少,而目前我的项目要用到相关的东西,查询官网过后总结一下。
一、相关概要
这个工具箱为 Python 带来了机器人特定的功能,并利用 Python 的可移植性、普遍性和支持性的优势,以及线性代数(numpy、scipy)、图形(matplotlib、three.js、WebGL)的开源生态系统的能力,交互式开发(jupyter、jupyterlab、mybinder.org)和文档(sphinx)。
工具箱提供了用于表示串行链接机械手的运动学和动力学的工具 – 您可以轻松地以 Denavit-Hartenberg 形式创建自己的工具,导入 URDF 文件,或使用来自 Franka-Emika 的 30 多种提供的知名当代机器人模型, Kinova、Universal Robotics、Rethink 以及 Puma 560 和 Stanford arm 等经典机器人。
该工具箱还将支持具有机器人运动模型(独轮车、自行车)、路径规划算法(bug、距离变换、D*、PRM)、运动动力学规划(晶格、RRT)、定位(EKF、粒子滤波器)等功能的移动机器人,地图构建 (EKF) 和同时定位和映射 (EKF)。
工具箱提供:
成熟的代码,为相同算法的其他实现提供一个比较点;
例程通常以简单明了的方式编写,易于理解,但可能以牺牲计算效率为代价;
可供学习和教学阅读的源代码;
与 Robotics Toolbox for MATLAB 的向后兼容性
该工具箱利用Python 的空间数学工具箱来提供对 SO(n) 和 SE(n) 矩阵、四元数、扭曲和空间向量等数据类型的支持
二、必要的库的安装
- 需要 Python >= 3.6
- spatialmath-python
- numpy
- numpy-stl
- vpython(这个库确实不知道怎么安装,但是安装不上也不影响后续,如果有知道到的可以,一起交流)
- python机器人工具箱
% git clone https://github.com/petercorke/robotics-toolbox-python.git
% cd robotics-toolbox-python
% pip install -e .
1.创建机械臂模型
步骤一:在模型库里面创建一个名为’MYROBOT.py’的文件,其中MYROBOT是机器人的描述性名称,它是一个有效的文件名和Python类名。
E:\pyproject\defecate\robotics-toolbox-python\roboticstoolbox\models\DH\MYROBOT.py这是我的地址
步骤二:加载库
from math import pi
import numpy as np
from roboticstoolbox import DHRobot, RevoluteDH, PrismaticDH, RevoluteMDH, PrismaticMDH
最后一行很重要,它定义了所有可能的类的可能。不会全部使用它们,为了保持整洁,你可以删除那些你不用的。这就是他们的目的;
‘RevoluteDH’用于使用标准DH参数的转动关节
‘PrismaticDH’用于使用标准DH参数的移动关节
‘RevoluteMDH’用于使用MDH参数的转动关节
‘PrismaticMDH’用于使用MDH参数的移动关节
步骤三:描述机械臂,记录下使用的单位、DH参数以及对模型来源的引用。
class MYROBOT(DHRobot):
"""
Create model of MYROBOT manipulator
KR5()是一个用标准DH约定对Kuka KR5机器人建模并描述其运动学特征的类。
.
定义的关节构型为:
qk1,公称工作位置1
qk2,公称工作位置2
qk3,公称工作位置3.
:notes:
.使用国际计量单位米
.包括一个11.5厘米的工具在z方向
.
:references:
.
.
.
"""
步骤四:在’init_’,通过创建适当的链接类的实例来定义一组链接变量
def __init__(self):
deg = pi/180
L0 = RevoluteDH(
d=0, # link length (Dennavit-Hartenberg notation)
a=0, # link offset (Dennavit-Hartenberg notation)
alpha=pi/2, # link twist (Dennavit-Hartenberg notation)
I=[0, 0.35, 0, 0, 0, 0], # inertia tensor of link with respect to
# center of mass I = [L_xx, L_yy, L_zz,
# L_xy, L_yz, L_xz]
r=[0, 0, 0], # distance of ith origin to center of mass [x,y,z]
# in link reference frame
m=0, # mass of link
Jm=200e-6, # actuator inertia
G=-62.6111, # gear ratio
B=1.48e-3, # actuator viscous friction coefficient (measured
# at the motor)
Tc=[0.395, -0.435], # actuator Coulomb friction coefficient for
# direction [-,+] (measured at the motor)
qlim=[-160*deg, 160*deg]) # minimum and maximum joint angle
L1 = RevoluteDH(
d=0, a=0.4318, alpha=0,
qlim=[-45*deg, 225*deg])
.
.
.
其中包含DH四参数以及一些动力学参数,一般只考虑动力学参数的话,仅仅需要DH参数接可以了,也可以加一些关节极限qlim()。
我们提供尽可能多的参数。上述L0的定义包括运动学参数和动力学参数,而L1只有运动学参数。最小的要求是运动学参数,你甚至不需要知道关节极限,它们只需要一些工具箱函数。对于一个有N个关节的机器人,你必须定义N个关节实例。接下来,我们调用super函数来完成繁重的工作。
super().__init__(
[L0, L1, L2, L3, L4, L5],
name="MYROBOT",
manufacturer="COMPANY THAT BUILDS MYROBOTs")
步骤五:创建实例属性,准备两个位姿,为后续正逆运动的验证做准备
# 零角度,L形姿势
self._MYCONFIG = np.array([1, 2, 3, 4, 5, 6]) # 创建实例属性
self.addconfiguration("qz", np.array([0,0,0,0,0,0 ])) # 零角度,L形姿势
self.addconfiguration("qr", np.array([0.610865,1.047198,0.785398,1.134464,0.628319,0 ]))
‘MYCONFIG’是这个特定配置的名称。它必须是一个有N个元素的NumPy数组。然后定义一个返回该属性的属性。
@property
def MYCONFIG(self):
return self._MYCONFIG
步骤六:底部要有一个main函数
if __name__ == '__main__':
robot = MYROBOT()
print(robot)
print(robot._MYCONFIG)
步骤七:将建立的模型添加到工具箱内,编辑此文件夹中的文件’init.py’。添加一行如下,同时_all[]中也要添加模型名称
from roboticstoolbox.models.DH.MYROBOT import MYROBOT
2.正逆运动的实现
步骤一;载入库
import roboticstoolbox as rtb
import numpy as np
from math import pi
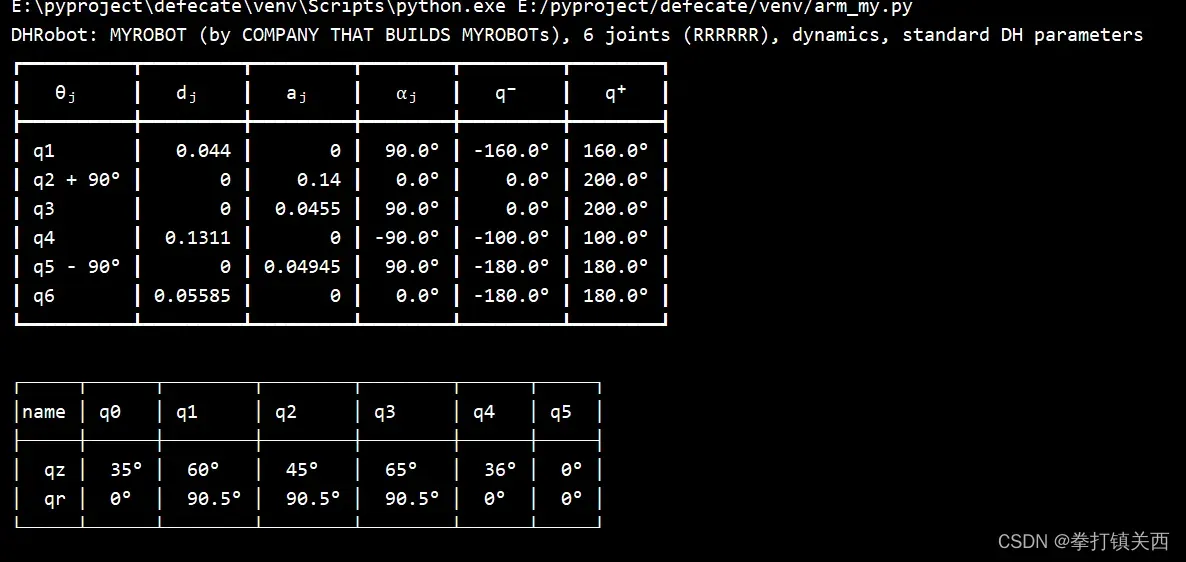
步骤二:验证机械臂参数是否能正确调用
robot = rtb.models.DH.MYROBOT()
#机械臂信息
print(robot)
输出内容
步骤三:模型验证
使用 matplotlib 图形将机器人显示为线条。matplotlib 是 Python 最普遍的图形库,可在所有平台上运行。
import roboticstoolbox as rtb
robot = rtb.models.DH.MYROBOT()
qt = rtb.tools.trajectory.jtraj(robot.qz, robot.qr, 50)
robot.plot(qt.q)

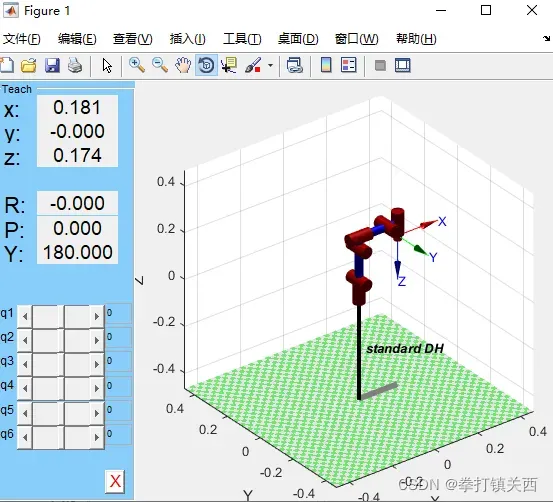
这里我是没弄出来,查了一下,网上说是可能是机器人工具箱本身存在的问题,有解决的也可以互相交流。
验证我是通过matlab进行仿真验证的
clc
clear
% theta d a alpha sigma
L1=Link([ 0 0.044 0 pi/2 0 ],'standard');
L2=Link([ 0 0 0.14 0 0 ],'standard');
L3=Link([ 0 0 0.0455 pi/2 0 ],'standard');
L4=Link([ 0 0.1311 0 -pi/2 0 ],'standard');
L5=Link([ 0 0 0.04945 pi/2 0 ],'standard');
L6=Link([ 0 0.05585 0 0 0 ],'standard');
L2.offset = pi/2
L5.offset = -pi/2
%%取名
robot = SerialLink([L1 L2 L3 L4 L5 L6],'name','standard DH');
%读取角度信息
filename = '.\数据.txt';
[theta1, theta2,theta3, theta4, theta5 ,theta6] = textread(filename , '%f %f %f %f %f %f', 1);
theta = [theta1, theta2,theta3, theta4, theta5 theta6];
% theta = [0.523599 1.047189 1.047189 0.523599 1.5070796 ]
% theta1 = theta(1);
% theta2 = theta(2);
% theta3 = theta(3);
% theta4 = theta(4);
% theta5 = theta(5);
du=pi/180;
ra=180/pi;
% -2.5946 0.0224 1.5707 -1.5930 2.5946
%定义关节范围
% L(1).qlim =[-170, 170]*du;
% L(2).qlim =[60-70, 60+70]*du;%-10,130
% L(3).qlim =[-70-70,-70+70]*du;%-140,0
% L(4).qlim =[-70,70]*du;
% L(5).qlim =[-170, 170]*du;
L1.qlim =[-180, 180]*du;
L2.qlim =[-180, 180]*du;
L3.qlim =[-180, 180]*du;
L4.qlim =[-180, 180]*du;
L5.qlim =[-180, 180]*du;
L6.qlim =[-180, 180]*du;
robot.teach()
步骤四:正运动(已知关节角度,求解末端位姿)
#正向运动
T = robot.fkine(robot.qr)
这里的qr,是建立的机械臂模型中两个姿态设定的其中一个姿态,分别是qz与qr,qz设置的是零角度姿态,qr是随意设置的一个姿态
前向运动学 (FK) 是给定关节坐标的末端执行器的位姿。可以为DHRobot或ERobot类的机器人计算
正运动学:总的来说就是末端位姿相对于基座标的位置关系,用矩阵表示,这种位置关系通过关节坐标来传递T = T01T12T23T34T45*T56,而这T矩阵就是通过DH参数表示出来的,具体操作下一个文章再说,这里简单讲一下。读者也可以自己写一下。
出来的结果如下:
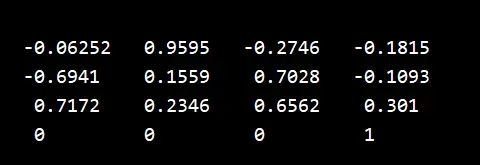
这是一个末端位姿相对于极坐标的位置的矩阵,第四列代表X,Y,Z坐标,中间三行三列代表航偏角、俯仰角、滚轮角,至此正运动学算出。
步骤五:逆运动学
逆运动学 (IK) 是实现给定末端执行器姿势所需的关节坐标。功能不是唯一的,可能没有解决办法。(已知末端位姿求解关节角度)
这里给出一些python版本和matlab版本机器人工具箱的差别
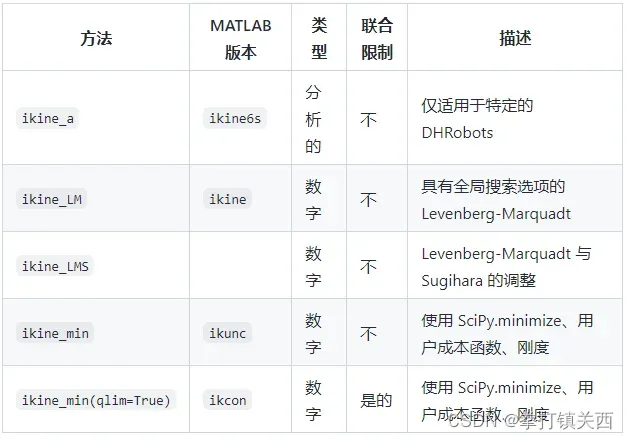
我选择的是ikine_LMS()
TT = robot.ikine_LMS(T)
print(TT)

可见所得角度与之前设定的qr角度差别很小,逆运动成功,逆运动自己写也可以,我运用的是数值解,下次和正运动一起写。
DH参数
-
1建立坐标系
1)确定Zi轴
作为第i+1个关节的驱动轴,其方向和关节轴线方向保持一致。例如Z0是第1个关节的驱动轴,Z1是第2个关节的驱动轴。可能看上去有点混乱,但是符合规则的,这保证了:当关节i被驱动时,连杆i以及与其相连的坐标系 OiXiYiZi,将会经历一个对应的运动。
另外 Zi轴的方向符合右手定则,注意和关节的转动方向对应!
2)确定基础坐标系
由前面的讨论可知,满足DH建模约束条件的坐标变换可以用
四个参数得到!
基础坐标系的选择近乎是任意的,我们可以选择将基础坐标系的原点 Oo放置在Z0 轴上任何一点。然后,可以通过任意方便的方式来选择X0轴和Y0轴。但是建立0坐标系时,要尽可能使得最后的DH参数简单。3)确定 Xi方向
a.轴 Zi-1和轴Zi不共面
那么轴Zi-1和轴Zi的公垂线定义了Xi轴,并且它于轴Zi的交点即为原点Oi。
b.轴Zi-1平行于轴Zi
这种情况下,轴Zi-1和轴Zi之间存在无穷多个共同法线。将穿过原点Oi-1的法线选作Xi轴, Oi是该法线和Zi轴的交点。
c.轴Zi-1和轴Zi相交
选择Xi垂直于由Zi-1和Zi组成的平面。原点Oi一般设为Zi-1和Zi的交点。不过,轴线Zi上的任意一点都可以被选作原点。
4)确定坐标系N
以上的三个步骤适用于坐标系0,…N-1。最终的坐标系通常被称为末端执行器或者工具坐标系。最常见的是,将原点Oi以对称方式布置在夹具的中间, Zi轴方向沿着末端移动方向(最后一个关节伸缩的方向)。Xi轴方向沿着夹具的上下开合方向。
因为有很多情况可以随意选择坐标系 Xi轴的方向,这就导致了不同的DH参数。为了规范DH建模方法,总结“使得DH参数简单”的一些法则。
1、确定Xi轴方向时,如果有很多种选择,尽可能选择与Xi-1相同的方向
2、确定坐标系0时,使得关节变量1的取值为零。如果是转动关节,关节变量就是;如果是平动关节,关节变量是d
3、符合人的习惯
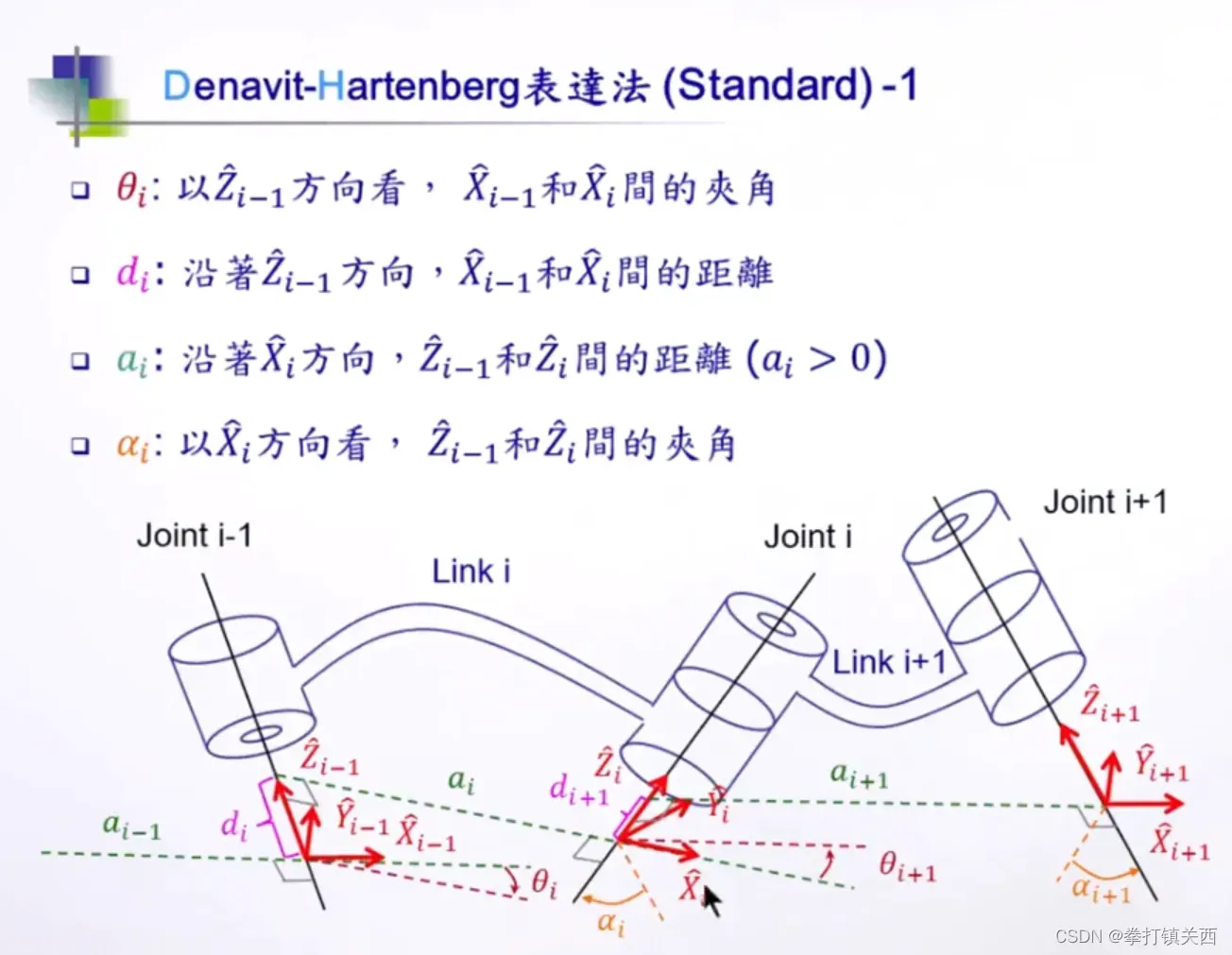
确定好坐标系过后就通过上面这张图进行DH参数的确定
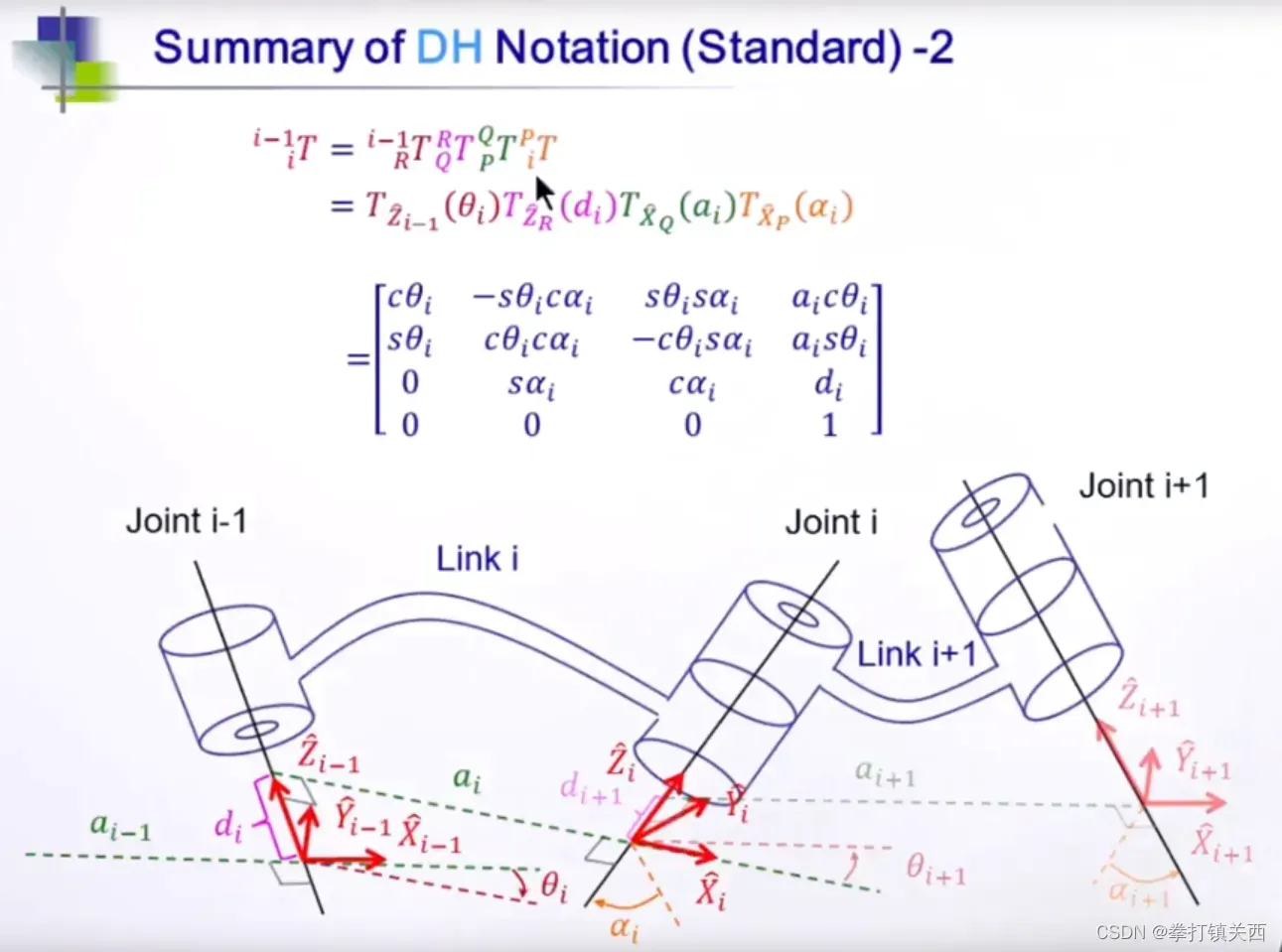
标准DH中矩阵带入参数来确定相邻两关节关系。
三、总结
主要是介绍python机器人工具箱的应用,DH参数顺便记录一下
文章出处登录后可见!