export PATH=/home/bai/anaconda3/bin:$PATHbash ~/Downloads/Anaconda3-2020.07-Linux-x86_64.shexport PATH=/home/bai/anaconda3/bin:$PATH2.Cuda安装
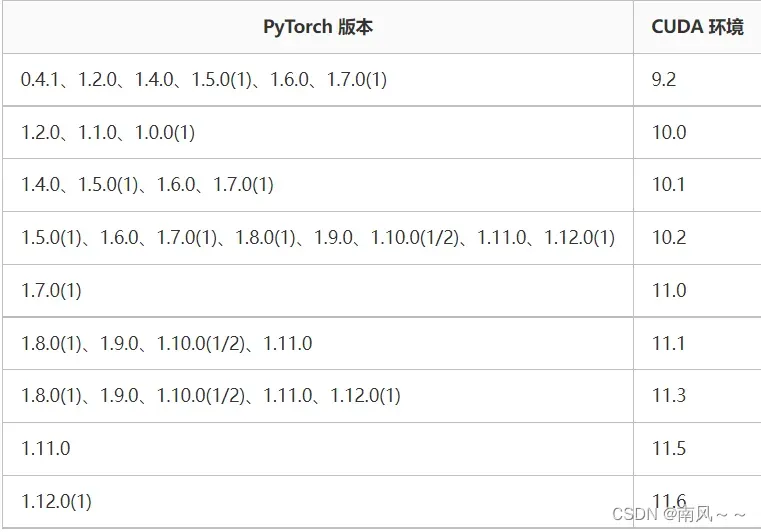
选择自己所需版本cuda下载,Cuda与Cudnn版本相对应
cuDNN Archive | NVIDIA Developer![]() https://developer.nvidia.com/rdp/cudnn-archive可以通过上面这个链接查看对应关系
https://developer.nvidia.com/rdp/cudnn-archive可以通过上面这个链接查看对应关系
cuda10.0官网地址![]() https://developer.nvidia.com/cuda-10.0-download-archive?target_os=Windows&target_arch=x86_64&target_version=10&target_type=exelocal
https://developer.nvidia.com/cuda-10.0-download-archive?target_os=Windows&target_arch=x86_64&target_version=10&target_type=exelocal
cudnn官网地址![]() https://developer.nvidia.com/cudnn 下载后点击exe,安装时候选择自定义然后一直下一步即可,安装完后在C盘这个位置可以找到根目录。C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v10.0,然后大家把Cudnn的内容进行解压,把这里面的内容直接复制到C盘的根目录下就可以了。
https://developer.nvidia.com/cudnn 下载后点击exe,安装时候选择自定义然后一直下一步即可,安装完后在C盘这个位置可以找到根目录。C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v10.0,然后大家把Cudnn的内容进行解压,把这里面的内容直接复制到C盘的根目录下就可以了。
3.Pytorch环境
本人尝试过好几个版本的pytorch发现基本都是可以的,一般安装cuda10.0或者10.1对应的都是可以的。
Win+R启动cmd,在命令提示符内输入以下命令:
conda create –n pytorch python=3.6
#创建一个名为pytorch的环境,该环境的python版本为3.6。
activate pytorch
激活环境
安装pytoch(Pytorch版本需要与cuda、python的版本相对应),官方地址是:
-i https://pypi.tuna.tsinghua.edu.cn/simple some-package
# CUDA 10.0 用于安装torch和torchvision
pip install torch===1.2.0 torchvision===0.4.0 -f https://download.pytorch.org/whl/torch_stable.html
安装其它库时可以打开 Anaconda Prompt或者cmd激活环境pip install +环境名称即可,如果有txt时可以用下面命令(requirements.txt前方的路径是根据自己的电脑修改)同样是可以换源的,直接在txt中修改即可:
pip install -r requirements.txt
4.克隆项目或者取github下载
git clone https://github.com/yanx27/Pointnet_Pointnet2_pytorch.git5.分类
#训练
python train_cls.py --model pointnet2_cls_msg --normal --log_dir
pointnet2_cls_msg
#pointnet2_cls_msg为模型,可自己选择如果内存较小卡死,可以修改batchzize减小即可。
#测试
python test_cls.py --normal --log_dir pointnet2_cls_msg可以在log文件夹下查看训练权重与日志。
6.部件分割
#训练
python train_partseg.py --model pointnet2_part_seg_msg --normal --log_dir
pointnet2_part_seg_msg
#测试
python test_partseg.py --normal --log_dir pointnet2_part_seg_msg7.场景分割
cd data_utils
python collect_indoor3d_data.py#训练
python train_semseg.py --model pointnet2_sem_seg --test_area 5 --log_dir
pointnet2_sem_seg
#测试
python test_semseg.py --log_dir pointnet2_sem_seg --test_area 5 --visual文章出处登录后可见!