本文介绍博主自己学习Simulink建模的方法。后续博客都会按照本文中的思路来记录博主学习的过程。
文章目录
1 Simulink建模的分类
博主至今为止写过很多博客,主题基本都是围绕MBD开发的,因为博主的专业背景是汽车软件开发这个方向。事实上,Simulink建模并不等同于电控软件开发。
1.1 连续模型建模
曾经有过同学在后台私信我,询问关于传递函数建模仿真的问题。博主认为这属于连续型建模,主要用于仿真,尤其是学术上的仿真,用来验证某些算法,并作为论文发表的依据。
这里在Simulink建模中,选择的求解器是可变步长的类型,如下图。
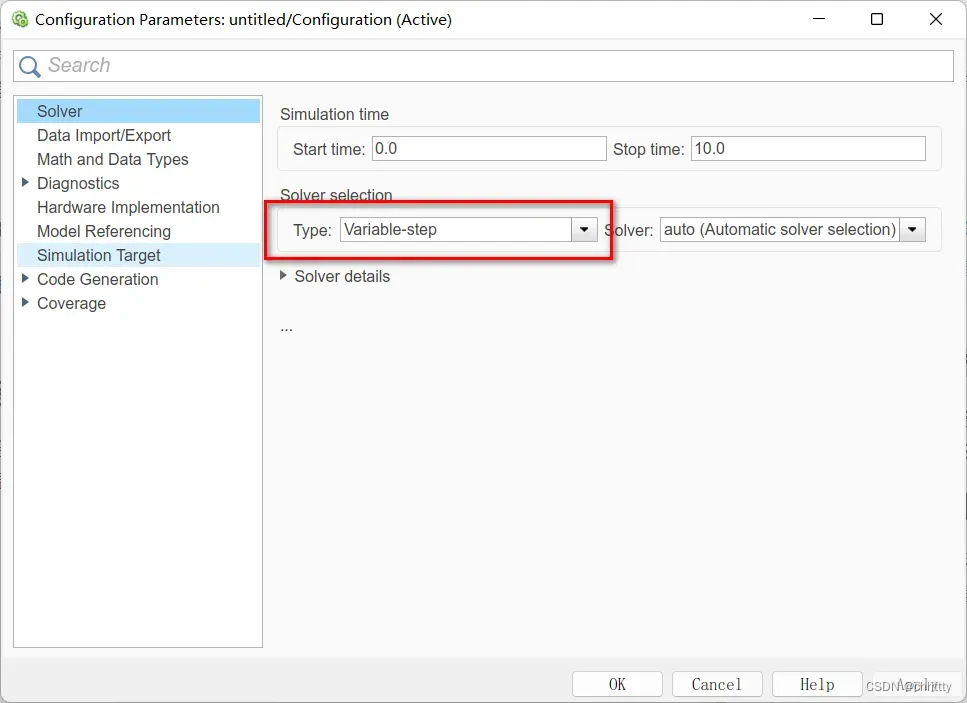
这部分的建模,后续的博客中不会涉及。因为博主在理论方面并不擅长。
1.2 物理模型建模
物理模型的搭建无论是学术上还是工程中都有应用。在Simulink和SimScape中,可以搭建物理模型并编译,然后下载到实时仿真系统中(例如Dspace或NI的设备)。这是汽车行业中进行HIL测试的重要环节之一。因为正确的物理模型,可以帮助在仿真阶段发现一部分的软件问题。
这部分技术路线也不会在博主的文章中涉及到。因为博主也没做过测试工程师,对此只是一知半解。有需要的小伙伴可以参考其他资料。
1.3 控制算法建模
控制算法建模将是后续博主在Simulink建模部分的主要内容。建立的控制算法模型将会实现控制器的应用层软件功能。本文的后续几章节会概述一下控制算法建模的基本知识以及博主的学习过程。
2 控制算法建模的基本知识
2.1 控制算法与电控软件架构
图中是Classic AUTOSAR的基本架构图。
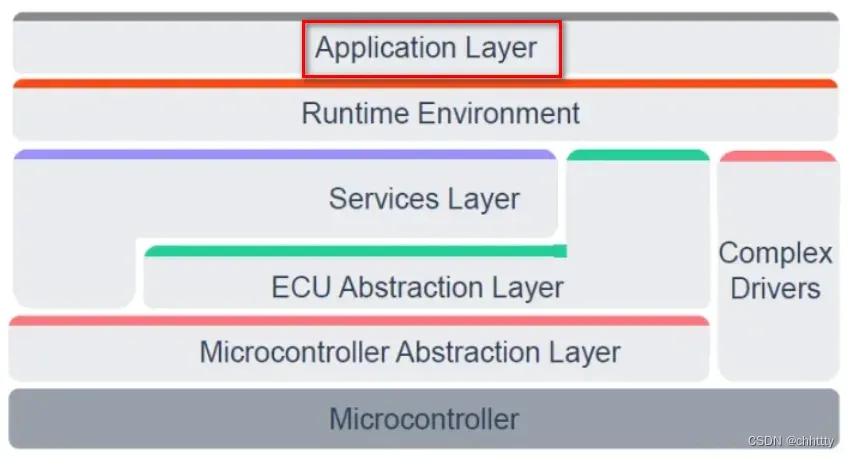
Autosar架构由微控制器、基础软件层、RTE层、应用层组成。而本文讨论的控制算法建模处于应用层软件中。通过Vector DaVinci可以生成架构和ARXML文件,然后导入Simulink中就能生成输入输出接口,然后在接口的基础上进行建模。建模完毕并且做好了相关的单元测试、集成测试后,便可以生成代码,与其他Autosar代码一起编译。
当然,博主也见过很多不用Autosar架构的团队做开发,但基本方式差不多,也是用Simulink进行应用层软件开发。
2.2 控制算法与周期调度
在建模的过程中,要有一个概念,就是该模型的调度周期是多少,譬如20ms,50ms等等。这里实现周期调度是通过BSW中的OS实现的。例如EngineControl.slx模型是20ms调度一次,那么该模型生成代码会有一个对应的EngineControl_step(void)函数,该函数应该放入对应的Task_20ms()的周期调度函数中。
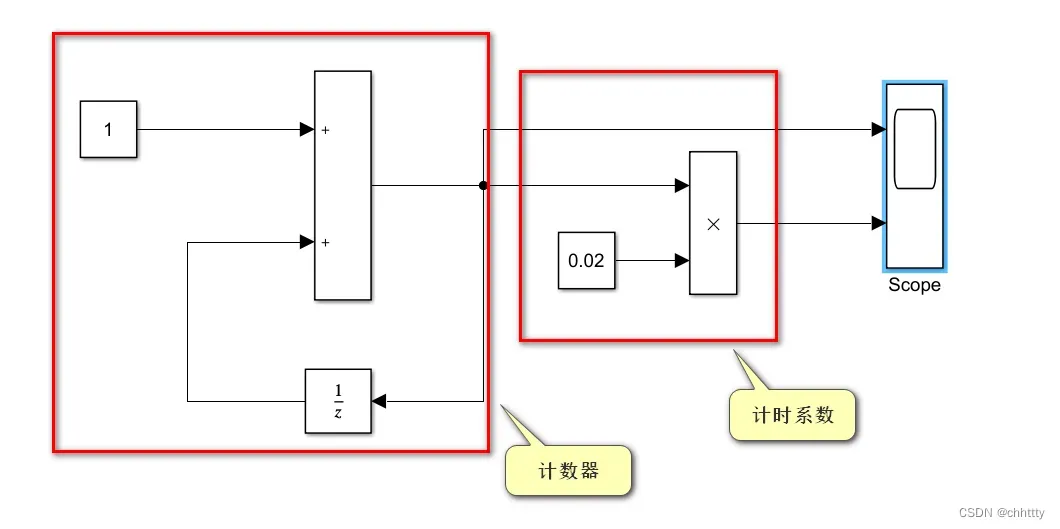
另外,如果模型中搭建了延时或者计时这类和时间相关的算法,就一定会将当前模型的周期体现在其中。例如下图的计时算法,首先通过Unit Delay进行计数,再将计数器得到的数字乘以该模块的调度周期(譬如0.02s),就会输出计时的结果。
2.3 控制算法与其他模块的接口
控制算法与其他模块的接口其实属于系统级别的知识,而不但是软件级别。对这些接口的理解也是至关重要的。这些接口都是通过底层软件处理后,传递到应用层的。博主简单讲一些常见的接口类型和来源。
1)CAN信号接口
整车上有几十块控制器,自己开发的控制器如果想获取其他控制器的物理量,就需要通过CAN信号接口传输过来。
例如,ACC(自适应巡航)功能激活的条件之一是车辆必须挂D档,那么这个挡位的信号就需要从TCU节点获取,也就是变速箱控制单元传来的CAN信号。同样的,ACC功能所在的ADAS控制器也会将自己计算的扭矩请求值发送给ECU节点,也就是说发动机控制单元获取扭矩后对这个信号进行响应。
2)Nvm信号接口
Nvm信号就是在控制器下电的时候,将信号的数值存储到EEPROM芯片或Flash中,以便下次上电后能够将这些信号读取出来传输给应用层算法算法。
例如,驾驶员在中控屏上将模式从标准模式调为运动模式,下电时就会将运动模式的状态写入EEPROM中,下次上电读出EEPROM中记忆的是运动模式。这样控制器就能记住驾驶员的选择。
3)传感器信号接口
控制器可以和传感器相连,由底层软件解析传感器信号,并传输到应用层。
例如,FCM前视摄像头模块将图像信息采集后传给控制器,再由控制器通过算法解析出车道线方程、目标车辆位置等信息。
3 学习控制算法建模
1)产品和工程背景
学习控制算法建模最好的办法就是在项目中去学习。根据自己所面对的产品和客户需求,通过建模实现想要的功能。产品越复杂,就需要更多的建模方法和技巧。产品不同,所做出的模型是不一样的。
比方说,一个搞电机的工程师和一个搞ADAS的工程师,虽然都会Simulink建模,但是因为专业知识和方向的不同,是无法理解对方的模型和算法的。
2)功能建模
Simulink建模无非就是通过最基础的模块和子系统,搭建出实现功能的模型。所以只要深入理解了想要实现的功能,建模是一个很简单的过程。
3)建模规范
在建模的过程中,需要遵守MAAB建模规范(或是其中的一部分),以便于增加模型的可读性、模型运行效率、代码质量等。
4)代码优化
最终生成的代码肯定要烧录到控制器中,但是控制器的资源十分有限,后期可能会溢出。所以模型也需要不断地优化其RAM资源、ROM资源、CPU负载等。
4 总结
本文介绍博主自己学习Simulink建模的方法。
文章出处登录后可见!