1、模型文件解读(yolov5s.yaml)
Yolov5的网络模型结构由位于models文件夹下的yaml文件定义。以yolov5的6.0版本为例,其models文件夹下有多个yaml文件(如下图),它们分别是yolov5n.yaml、yolov5s.yaml、yolov5m.yaml、yolov5l.yaml、yolov5x.yaml,其区别仅为depth_multiple和width_multiple两个参数不同。虽然5个yaml文件中的backbone和head部分完全相同,但通过depth_multiple和width_multiple这两个参数即可实现不同复杂度的模型设计。
以yolov5s.yaml文件为例(如下所示),对模型文件中的参数进行详解。
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 4 #80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
– [10,13, 16,30, 33,23] # P3/8
– [30,61, 62,45, 59,119] # P4/16
– [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, ‘nearest’]],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, ‘nearest’]],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
(1)nc:num of class类别数
(2)depth_multiple:model depth multiple,模型深度,用来控制子模块数量
(3)width_multiple:layer channel multiple,Conv通道channel的个数,即卷积核的数量
(4)anchors:9(3*3)个锚框的大小,分别在三个Detect层的feature map中使用。
如下所示,尺度越大的freature map分辨率越大,相对于原图的下采样越小,其感受野越小,设置的anchors自然越小,如[10,13, 16,30, 33,23],因此对原始图像中的小物体预测较好;相反,尺度越小的freature map分辨率越小,相对于原图的下采样越大,其感受野越大,设置的anchors自然越大,如[116, 90, 156,198, 373,326], 因此对原始图像中的大物体预测较好。
3组anchors的大小多是根据经验所得,若需要对此进行修改优化,可根据k-means和遗传进化算法找到与自己所使用的数据集最温和放大anchors。
(5)backbone:骨干网络,每一行即对每个模块进行描述,每行均有4个参数,分别为
from:该层数据源从哪里获得,-1表示上一层
number:该层的重复次数,实际中的重复次数=number*depth_multiple
module:该层模型类、
args:参数列表,是该模块所需参数,包括channel、kernel_size、stride、padding和bias等,不同的层参数有所变化。在yolov中没有明显用于下采样的polling层,但是在部分层中的stride为2以上,则说明该层包含有下采样的功能。
(6)head:头部网络,包括Neck颈部网络和预测Prediction部分,同backbone类似,每行为一个模块,且其参数定义与backbone一样。部分from参数为一个list,表面该层的数据来源于多个前面层的输出数据。
2.模型查看
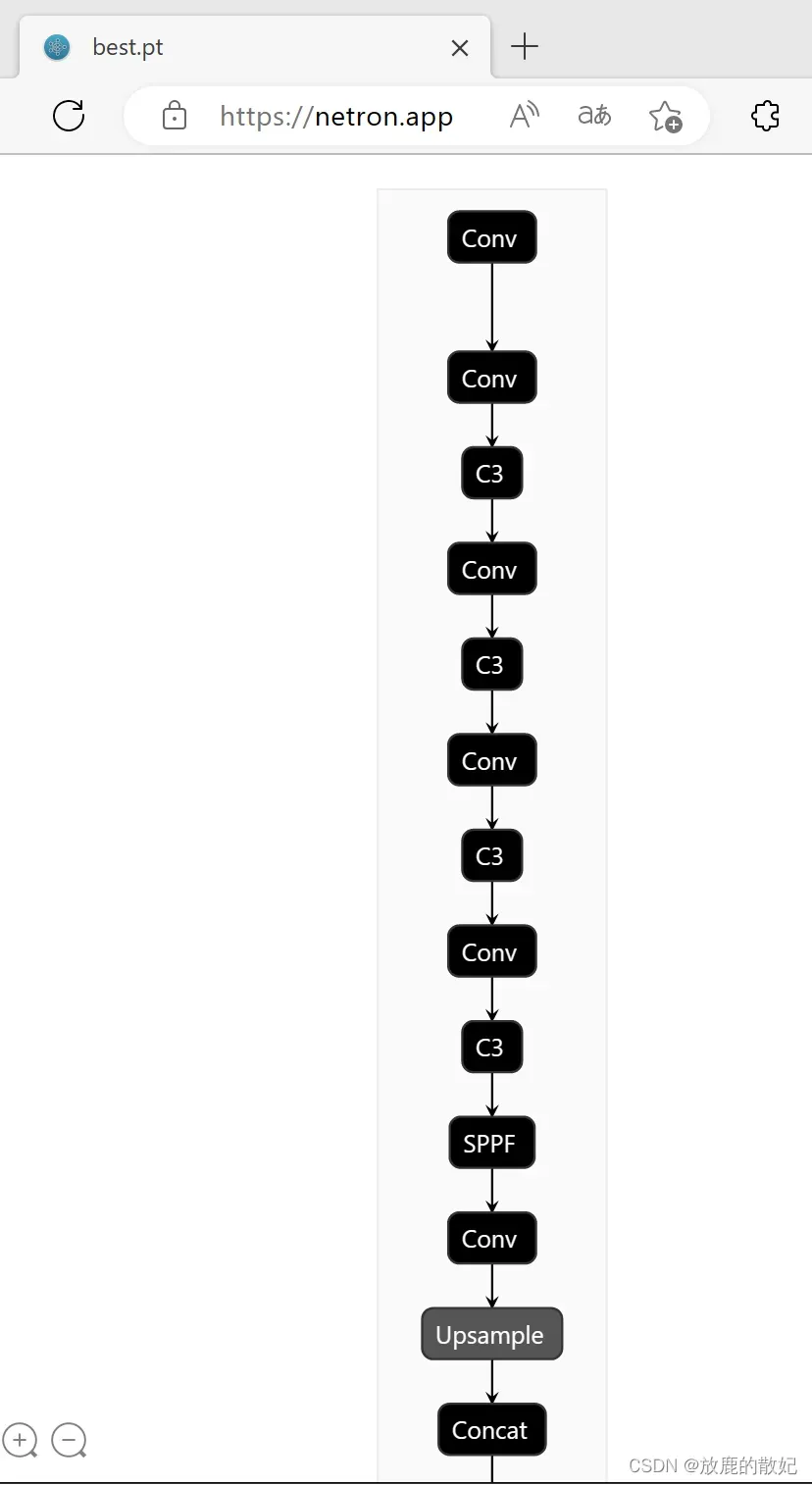
netron是常用的模型查看工具之一,可以下载并安装,也可直接使用网络版,即打开浏览器,输入地址https://netron.app/,将模型文件加载即可。当训练完成后生成了pt文件,但netron对pt文件的细节显示不足,如下图所示为部分内容,其网络结构与yaml文件一致。
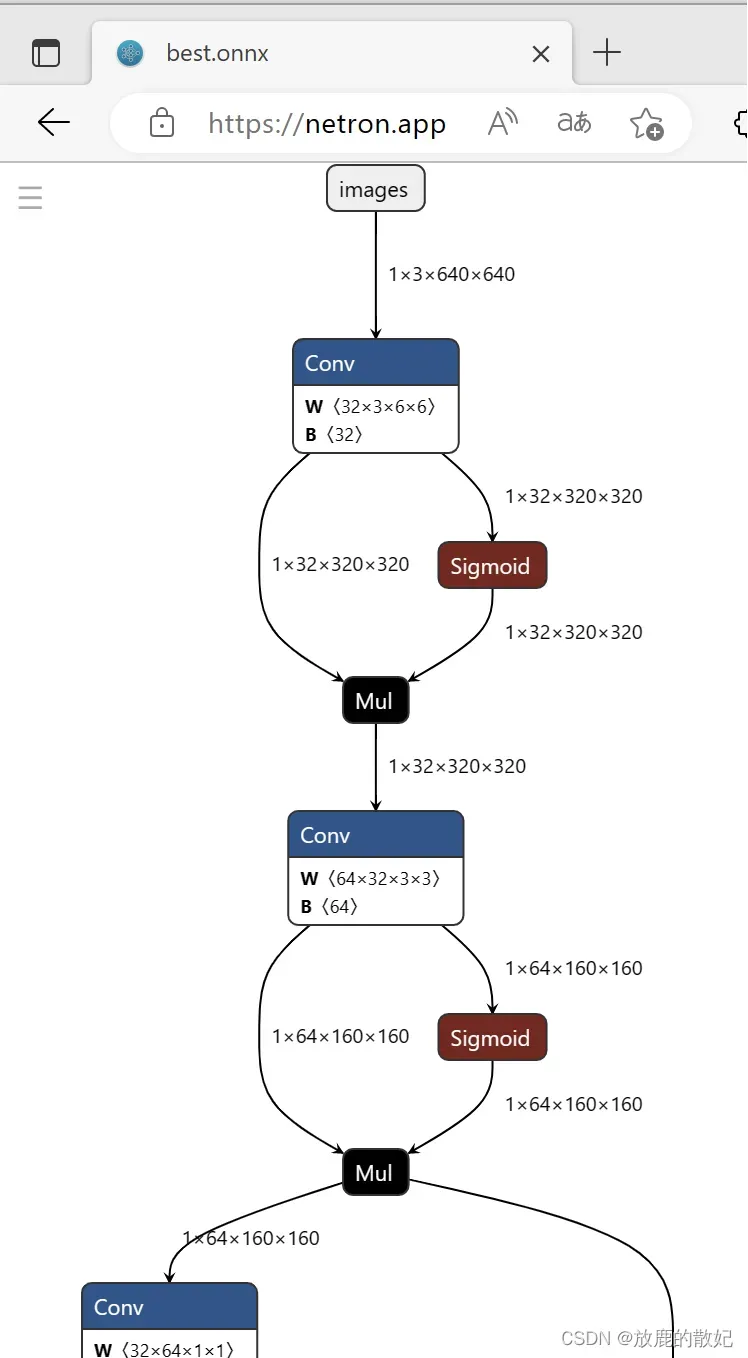
但若想查看详细的模型结构,则需要将pt文件转换为onnx文件。可使用yolov5目录下的export.py文件进行转换:
python export.py –include onnx –weight path/to/xxx.pt –img 640 –train –simplify
即可在pt文件同一目录下生成onnx文件,如下图所示。

将best.onnx加载到netron.app中,即可查看网络结构,如下所示为其部分内容。
3. 模型修改
在进行train的时候,控制台打印出网络模型,如下图所示。该输出与yaml文件中一致。
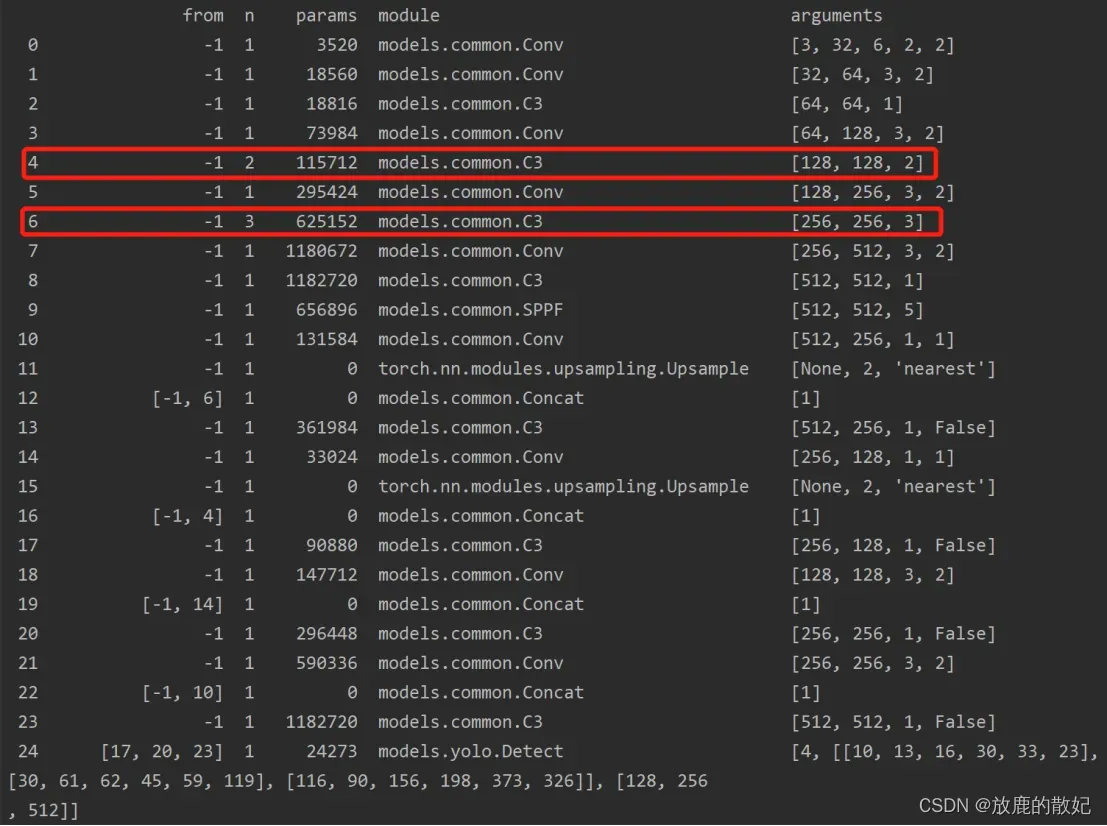
若将第4层的C3*2改为C3*1,第6层的C3*3改为C3*2,则只需要修改模型配置文件,如下所示为修改后的文件yolov5_change.yaml的部分内容,修改部分为图中红框所示。 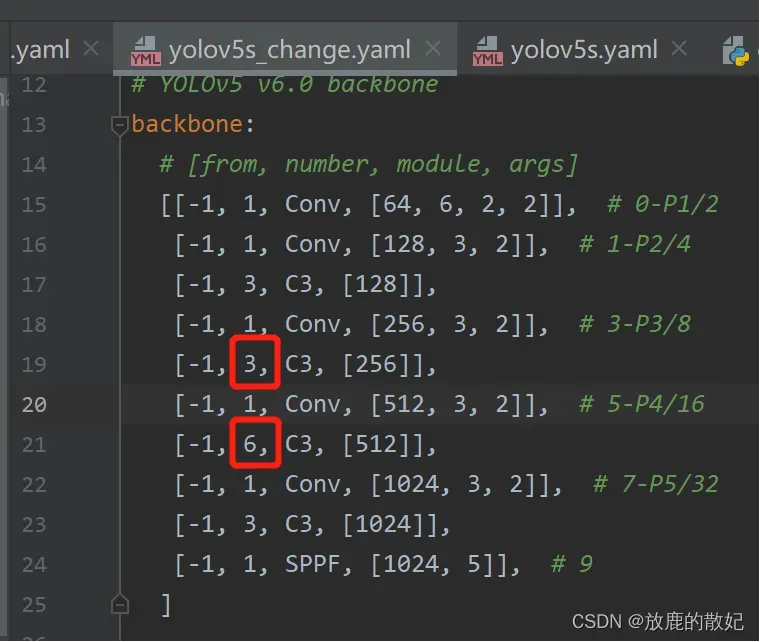
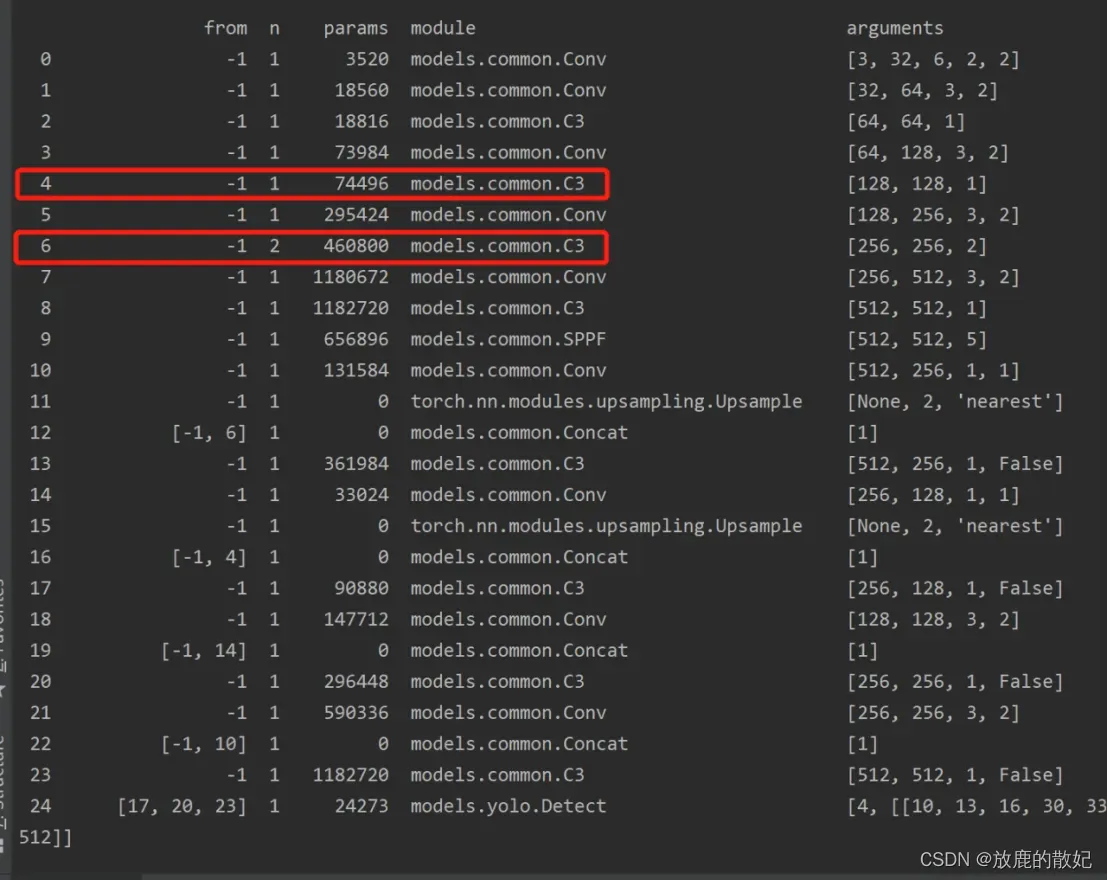
重新进行训练执行train.py时,设置weights为yolov5_change.yaml文件,控制台输出信息如下所示,红框中部分内容说明修改成功。
文章出处登录后可见!