文章目录
- 前言
- 一、openCV安装
- 二、尝试使用cv2中库函数
- 1.读取图片
- 2.图片显示
- 3.延时/暂停
- 4.保存图片
- 5.清楚所有窗口
- 三、Canny边缘检测
- 1.高斯滤波
- 2.图片转换
- 3.边缘检测
- 四、ROI and mask
- 五、霍夫变换
- 六、离群值过滤
- 七、最小二乘法拟合
- 八、车道线标注
- 九、视频读写
- 1.打开视频
- 2.按帧读取视频
- 3.视频编码格式设置
- 4.写视频参数设置
- 十、其他
- 总结
- 附视频检测完整程序
前言
本文使用python+openCV
用到的算法:
高斯滤波
Canny边缘检测
ROI和mask
霍夫变换
离群值过滤
最小二乘法拟合
一、openCV安装
win+x选择运行,然后输入cmd
输入pip install opencv-python等待安装
在IDLE中新建脚本.py文件,输入import cv2,如果无报错即为安装成功。
再输入print(cv2.__version__)可查看openCV版本。
二、尝试使用cv2中库函数
1.读取图片
cv2.imread(const String & filename, int flags = IMREAD_COLOR)
第一个参数是窗口的名字,第二个参数是读取格式(彩色或灰度),函数返回值是图片转换格式后所对应的列表。
如img = cv2.imread('img.jpg',cv2.IMREAD_GRAYSCALE)
2.图片显示
cv2.imshow(window_name, img)
第一个参数是窗口的名字,可以创建多个窗口,但是必须给他们不同的名字。第二个参数是显示格式,可以是img图片格式,也可以是mat数组格式。

3.延时/暂停
cv2.waitKey(int x)
相当于程序延时,调整
cv2.imshow()的显示时间。延时时间为x毫秒。返回值为在延时期间按下键盘上按键所对应的ASCII值。
x=0时,即cv2.waitKey(0)表示程序停在此处,直到手动关闭cv2.imshow()的窗口。
例如设计一个,无穷延时,当键盘按下q时退出。
if cv2.waitKey(1) & 0xFF == ord(‘q’): break
#ord()是将字符转换为ASCII码
4.保存图片
cv2.imwrite(newfile_name, img)
第一个参数是保存的新图片的文件名,第二个参数是应保存的图片对应的列表。
5.清楚所有窗口
cv2.destroyAllWindows()
关闭所有openCV打开的窗口。
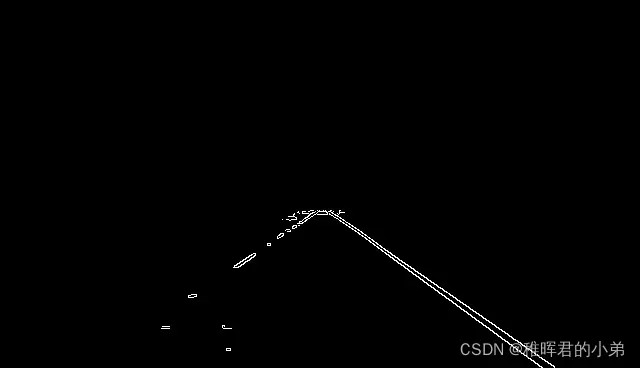
三、Canny边缘检测
CV2提供了提取图像边缘的函数canny。其算法思想如下:
1. 使用高斯模糊,去除噪音点(cv2.GaussianBlur)
2. 灰度转换(cv2.cvtColor)
3. 使用sobel算子,计算出每个点的梯度大小和梯度方向
4. 使用非极大值抑制(只有最大的保留),消除边缘检测带来的杂散效应
5. 应用双阈值,来确定真实和潜在的边缘
6. 通过抑制弱边缘来完成最终的边缘检测
1.高斯滤波
gaussian = cv2.GaussianBlur(color_img, (gaussian_ksize,gaussian_ksize), gaussian_sigmax)
color_img 输入图片
gaussian_ksize 高斯核大小,可以为方形矩阵,也可以为矩形
gaussian_sigmax X方向上的高斯核标准偏差
没看太懂这个函数,目前仅局限于搬来直接用,下次一定
2.图片转换
gray_img = cv2.cvtColor(input_image, flag)
用于颜色空间转换。input_image为需要转换的图片,flag为转换的类型,返回值为颜色空间转换后的图片矩阵。flag对应:
cv2.COLOR_BGR2GRAY BGR -> Gray
cv2.COLOR_BGR2RGB BGR -> RGB
cv2.COLOR_BGR2HSV BGR -> HSV
可以了解一下该函数和cv2.imread()的区别

3.边缘检测
edge_img = cv2.Canny(gray_img,canny_threshold1,canny_threshold2)
imag为所操作的图片,threshold1为下阈值,threshold2为上阈值,返回值为边缘图。

四、ROI and mask
利用数组选取ROI(region of interest,感性趣的区域,然后与原图进行布尔运算(与运算)。
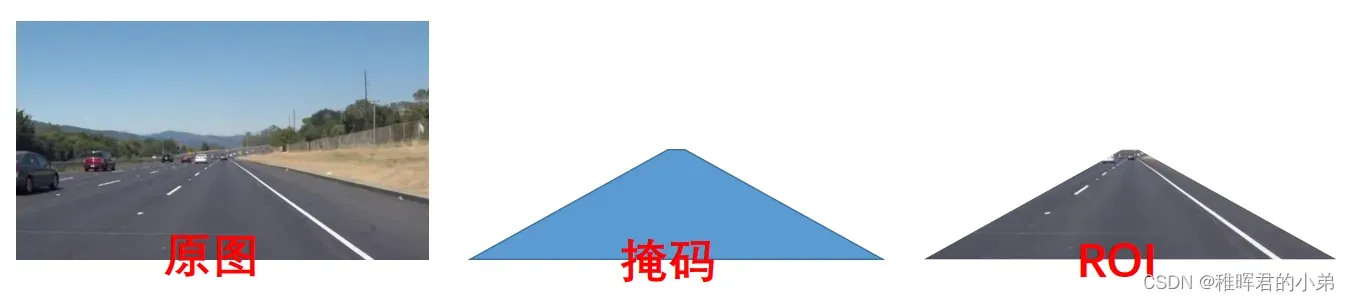
poly_pts = numpy.array([[[0,368],[300,210],[340,210],[640,368]]])
四个数组创建后保存在变量poly_pts中。
mask = np.zeros_like(gray_img)
构建一个与gray_img同维度的数组,并初始化所有变量为零。
cv2.fillPoly(mask, pts, color)
绘制多边形函数。mask为绘制对像,pts为绘制范围,color为绘制颜色。
img_mask = cv2.bitwise_and(gray_img, mask)
与运算
五、霍夫变换
得到一系列的直线
lines = cv2.HoughLinesP(edge_img, 1, np.pi / 180, 15, minLineLength=40, maxLineGap=20)
edge_img: 要检测的图片矩阵
参数2: 距离r的精度,值越大,考虑越多的线
参数3: 距离theta的精度,值越大,考虑越多的线
参数4: 累加数阈值,值越小,考虑越多的线
minLineLength: 最短长度阈值,短于这个长度的线会被排除
maxLineGap:同一直线两点之间的最大距离
返回值::
[np.array([[x_1,y_1, x_2, y_2]]),
np.array([[x_1, y_1, x_2, y_2]]),
…,
np.array([[x_1, y_1, x_2, y_2]])]
六、离群值过滤
循环查找超出设定范围的斜率,并去除。
idx = np.argmax(diff)
当diff中存放的是一维时,找到diff中最大的数值,并返回该值所在位置。
示例:
one_dim_array = np.array([1, 4, 5, 3, 7, 2, 6])
print(np.argmax(one_dim_array))
打印结果为 4
lines.pop(idx)
从列表lines中把第idx数去除
七、最小二乘法拟合
获得左车道线和右车道线的理想直线
x_coords = np.ravel([[line[0][0], line[0][2]] for line in lines])
将多维数组降为一维
还未想明白转换关系,下次一定
poly = np.polyfit(x, y, deg)
x, y为各个点的横纵坐标,deg为拟合曲线的次数
y_e = np.polyval(poly, x)
拟合曲线之后,x在曲线上对应的y值
八、车道线标注
cv2.line(img, tuple(line[0]), tuple(line[1]), color,thickness)
在图片上画线,img为所标注的目标图片,ine[0]为起点坐标,line[1]为终点坐标,thickness为线宽。
注意两个坐标需要为tuple元组格式,即tuple(line[0])

九、视频读写
1.打开视频
capture = cv2.VideoCapture('video.mp4')
如果为
cv2.VideoCapture(0),表示打开笔记本的内置摄像头。
2.按帧读取视频
ret, frame = capture.read()
其中ret是布尔值,如果读取帧是正确的则返回True,如果文件读取到结尾,它的返回值就为False。
frame就是每一帧的图像,是个三维矩阵。
3.视频编码格式设置
fourcc = cv2.VideoWriter_fourcc('X', 'V', 'I', 'D')
fourcc意为四字符代码(Four-Character Codes),顾名思义,该编码由四个字符组成,下面是VideoWriter_fourcc对象一些常用的参数,注意:字符顺序不能弄混
cv2.VideoWriter_fourcc(‘I’, ‘4’, ‘2’, ‘0’),该参数是YUV编码类型,文件名后缀为.avi
cv2.VideoWriter_fourcc(‘P’, ‘I’, ‘M’, ‘I’),该参数是MPEG-1编码类型,文件名后缀为.avi
cv2.VideoWriter_fourcc(‘X’, ‘V’, ‘I’, ‘D’),该参数是MPEG-4编码类型,文件名后缀为.avi
cv2.VideoWriter_fourcc(‘T’, ‘H’, ‘E’, ‘O’),该参数是Ogg Vorbis,文件名后缀为.ogv
cv2.VideoWriter_fourcc(‘F’, ‘L’, ‘V’, ‘1’),该参数是Flash视频,文件名后缀为.flv
4.写视频参数设置
outfile = cv2.VideoWriter(filename, fourcc, 25, (1280,368))
filename为写入视频的文件名,fourcc为视频编码格式cv2.VideoWriter_fourcc()的返回值,25为帧率,(1280,368)为视频大小。
ret, frame = capture.read()
第一个参数ret 为布尔值即True 或者False,代表有没有读取到图片,第二个参数frame表示截取到一帧的图片
output = np.concatenate((origin, frame), axis=1)
能够一次完成多个数组的拼接
不写axis参数的话,默认为按列拼接;若axis = 1的话,即为按行拼接;
axis参数意义没搞太明白,下次一定

十、其他
程序存在小bug但不影响检测视频生成,如果哪位大佬知道bug怎么解决记得踢我一脚。
cv2.imshow()总是卡住无响应,无法自己关闭窗口,使用cv2.destroyAllWindows()也还是卡住;
而且报告错误:
error: OpenCV(4.5.5) D:\a\opencv-python\opencv-python\opencv\modules\imgproc\src\smooth.dispatch.cpp:617: error: (-215:Assertion failed) !_src.empty() in function 'cv::GaussianBlur'
> 卡住的问题有人说是openCV对一部分硬件的适配不好,我比较在赞成这种观点。 报错 cv2.error error:
> (-215:Assertion failed) dst.data == (uchar*)dst_ptr in function
> 'cvShowImage'
>
> 同样的代码,我发现在公司电脑1060上,cv2.imshow()就可以显示,但在自己2080ti上就总是报错如上。于是锁定在cv2版本问题,果然卸掉最新的4.0版本,换上3.4.4.19就好了。
>
> 可能是4.0版本与2080ti的卡还不兼容。
> 来源:https://blog.csdn.net/qq_39938666/article/details/88179966
报错的问题目前未解决,也修改不掉。
总结
完全实现对视频形式的单车道直线行驶时对车道线检测和标注。
附视频检测完整程序
import cv2
import numpy as np
#高斯滤波+canny边缘检测
def get_edge_img(color_img, gaussian_ksize=5, gaussian_sigmax=1,
canny_threshold1=50, canny_threshold2=100):
#param intoduction
#color_img 输入图片 gaussian_ksize 高斯核大小
#gaussian_sigmax X方向上的高斯核标准偏差
gaussian = cv2.GaussianBlur(color_img, (gaussian_ksize, gaussian_ksize),
gaussian_sigmax)
gray_img = cv2.cvtColor(gaussian,cv2.IMREAD_GRAYSCALE)
edge_img = cv2.Canny(gray_img,canny_threshold1,canny_threshold2);
return edge_img
def roi_mask(gray_img):
poly_pts = np.array([[[0,368],[300,210],[340,210],[640,368]]])
mask = np.zeros_like(gray_img)
cv2.fillPoly(mask, pts=poly_pts, color=255)
img_mask = cv2.bitwise_and(gray_img, mask)
return img_mask
def get_lines(edge_img):
#斜率计算
def calculate_slope(line):
x_1, y_1, x_2, y_2 = line[0]
slope = (y_2-y_1)/(x_2-x_1)
return slope
#离群值过滤
def reject_abnormal_lines(lines, threshold):
slopes = [calculate_slope(line) for line in lines]
while len(lines)>0:
mean = np.mean(slopes)
diff = [abs(s-mean) for s in slopes]
idx = np.argmax(diff)
if diff[idx]>threshold:
slopes.pop(idx)
lines.pop(idx)
else:
break
return lines
#最小二乘拟合
def least_squares_fit(lines):
x_coords = np.ravel([[line[0][0], line[0][2]] for line in lines])
y_coords = np.ravel([[line[0][1], line[0][3]] for line in lines])
# 2. 进行直线拟合.得到多项式系数
poly = np.polyfit(x_coords, y_coords, deg=1)
# 3. 根据多项式系数,计算两个直线上的点,用于唯一确定这条直线
point_min = (np.min(x_coords), np.polyval(poly, np.min(x_coords)))
point_max = (np.max(x_coords), np.polyval(poly, np.max(x_coords)))
return np.array([point_min, point_max],dtype=np.int0)
lines = cv2.HoughLinesP(edge_img, 1, np.pi/180, 15, minLineLength=40, maxLineGap=20)
left_lines = [line for line in lines if calculate_slope(line)<0]
right_lines = [line for line in lines if calculate_slope(line)>0]
left_lines = reject_abnormal_lines(left_lines, threshold=0.2)
right_lines = reject_abnormal_lines(right_lines, threshold=0.2)
return least_squares_fit(left_lines),least_squares_fit(right_lines)
def draw_line(img, lines):
left_line, right_line = lines
cv2.line(img, tuple(left_line[0]), tuple(left_line[1]), color=(0,255,255),thickness=5)
cv2.line(img, tuple(right_line[0]), tuple(right_line[1]), color=(0,255,255),thickness=5)
def show_lane(color_img):
edge_img = get_edge_img(color_img)
mask_gray_img = roi_mask(edge_img)
lines = get_lines(mask_gray_img)
draw_line(color_img, lines)
return color_img
if __name__ == '__main__':
capture = cv2.VideoCapture('video.mp4')
fourcc = cv2.VideoWriter_fourcc('X', 'V', 'I', 'D')
outfile = cv2.VideoWriter('output.avi', fourcc, 25, (1280,368))
while True:
ret, frame = capture.read()
origin = np.copy(frame)
frame = show_lane(frame)
output = np.concatenate((origin, frame), axis=1)
outfile.write(output)
cv2.imshow('video', output)
cv2.waitKey(10)
分步操作检测图片和检测视频的源码、测试图片和测试视频连接:https://download.csdn.net/download/qq_27839923/75831347
文章出处登录后可见!