1 环境
- Python 3.8.8
- PyCharm 2021
- opencv-python
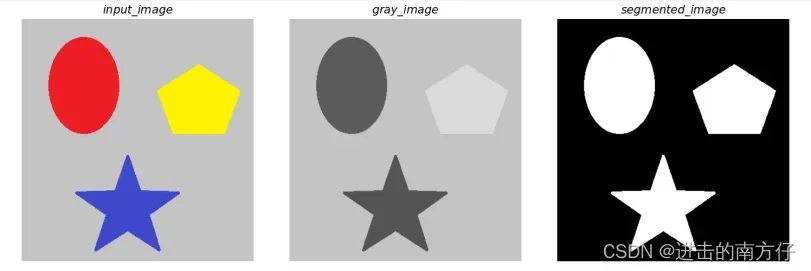
2 效果
3 原理
区域增长从一个或几个像素点开始,最终得到整个区域,进而实现目标提取。分割合并几乎是区域增长的逆过程:从整幅图像开始,不断分割得到每个子区域,然后合并前景区域,实现目标提取。拆分和合并的假设是,对于一幅图像,前景区域是由一些相互连接的像素组成的。因此,如果将图像分割到像素级别,则可以确定该像素是否为前景像素。当判断所有像素或子区域时,将前景区域或像素组合即可得到前景目标。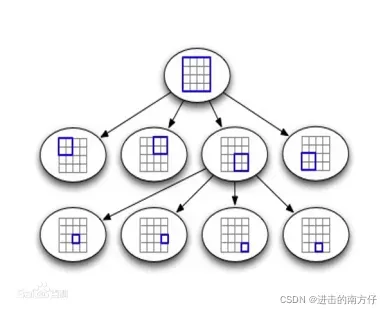
区域分割和合并中最常用的方法是四叉树分解法。算法过程如下。令代表整个正方形图像区域,
代表逻辑谓词,
可以理解为分割和合并的准则函数。基本的拆分和合并算法步骤如下:
- 对于任何区域,如果
将其拆分为不重叠的四分之一。
- 对于两个相邻的区域
和
,它们的大小也可以不同(即不在同一层)。如果满足条件
,则合并。
- 如果无法进行进一步的拆分或合并,则结束。
该方法对复杂图像有较好的分割效果,但算法较复杂,计算量大,分割也可能破坏区域的边界。
4 代码
要将物体从背景中分离出来,主要过程如下:
- 读取图像的灰度图,这是为了方便拆分和合并。
- 此次实例采用了递归数据结构进行分裂和合并,分裂合并的准则采用的表达式为
,当区域内超过
的像素满足这一条件时,就返回True,对当前区域进行合并处理,否则以左上方块、右上方、左下方和右下方的顺序继续递归分裂。
- 合并的操作是对当前区域进行阈值分割,本实验采用了双阈值法,因为灰度图中五角星、椭圆、背景、五边形的像素值分别为:84、91、195、218。
代码:
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
#分裂
def Division_Judge(img, h0, w0, h, w) :
area = img[h0 : h0 + h, w0 : w0 + w]
mean = np.mean(area)
std = np.std(area, ddof = 1)
total_points = 0
operated_points = 0
for row in range(area.shape[0]) :
for col in range(area.shape[1]) :
if (area[row][col] - mean) < 2 * std :
operated_points += 1
total_points += 1
if operated_points / total_points >= 0.95 :
return True
else :
return False
def Merge(img, h0, w0, h, w) :
# area = img[h0 : h0 + h, w0 : w0 + w]
# _, thresh = cv.threshold(area, 0, 255, cv.THRESH_OTSU + cv.THRESH_BINARY_INV)
# img[h0 : h0 + h, w0 : w0 + w] = thresh
for row in range(h0, h0 + h) :
for col in range(w0, w0 + w) :
if img[row, col] > 100 and img[row, col] < 200:
img[row, col] = 0
else :
img[row, col] = 255
def Recursion(img, h0, w0, h, w) :
#如果满足分裂条件继续分裂
if not Division_Judge(img, h0, w0, h, w) and min(h, w) > 5 :
#递归继续判断能否继续分裂
#左上方块
Division_Judge(img, h0, w0, int(h0 / 2), int(w0 / 2))
#右上方块
Division_Judge(img, h0, w0 + int(w0 / 2), int(h0 / 2), int(w0 / 2))
#左下方块
Division_Judge(img, h0 + int(h0 / 2), w0, int(h0 / 2), int(w0 / 2))
#右下方块
Division_Judge(img, h0 + int(h0 / 2), w0 + int(w0 / 2), int(h0 / 2), int(w0 / 2))
else :
#合并
Merge(img, h0, w0, h, w)
def Division_Merge_Segmented() :
img = cv.imread('images/shapes.png')
img_gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
hist, bins = np.histogram(img_gray, bins = 256)
print(f'五角星、椭圆、背景、五边形的像素值分别为:'
f'{"、".join("%s" % pixel for pixel in np.unique(img_gray))}')
segemented_img = img_gray.copy()
Recursion(segemented_img, 0, 0, segemented_img.shape[0], segemented_img.shape[1])
plt.figure(figsize=(12, 4))
plt.subplot(131), plt.imshow(cv.cvtColor(img, cv.COLOR_BGR2RGB))
plt.axis('off'), plt.title(f'$input\_image$')
plt.subplot(132), plt.imshow(img_gray, cmap='gray', vmin = 0, vmax = 255)
plt.axis('off'), plt.title(f'$gray\_image$')
plt.subplot(133), plt.imshow(segemented_img, cmap='gray')
plt.axis('off'), plt.title(f'$segmented\_image$')
plt.tight_layout()
plt.show()
if __name__ == '__main__':
Division_Merge_Segmented()
文章出处登录后可见!
已经登录?立即刷新