1.单目相机模型
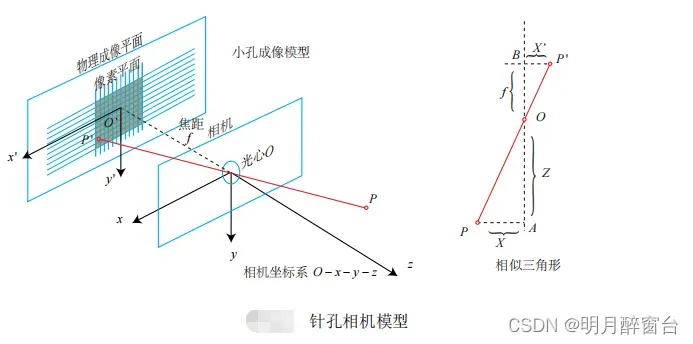
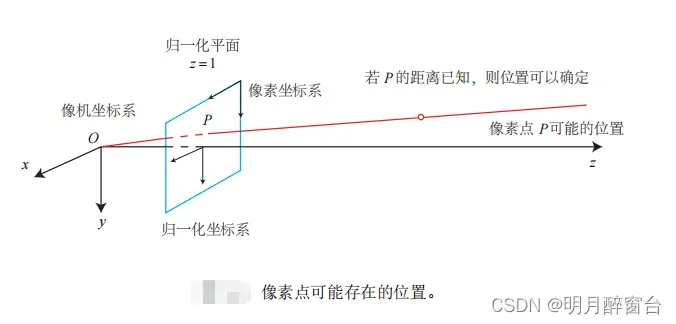
相机将 3D 世界中的坐标点(以米为单位)映射到 2D 图像平面(以像素为单位)的过程
可以用几何模型来描述。这种模型有很多种,其中最简单的称为针孔模型。针孔模具
模型是一种非常常见且有效的模型,它描述了光束穿过针孔后在针孔背面的投影。
关系。在本书中,我们使用一个简单的针孔相机模型来模拟这种映射。同时,由于
相机镜头上镜头的存在会导致光线在投射到成像平面上时发生畸变。因此,我们
使用针孔和畸变两种模型来描述整个投影过程。
在本节中,我们首先给出相机的针孔模型,然后解释镜头的畸变模型。这两个模型可以
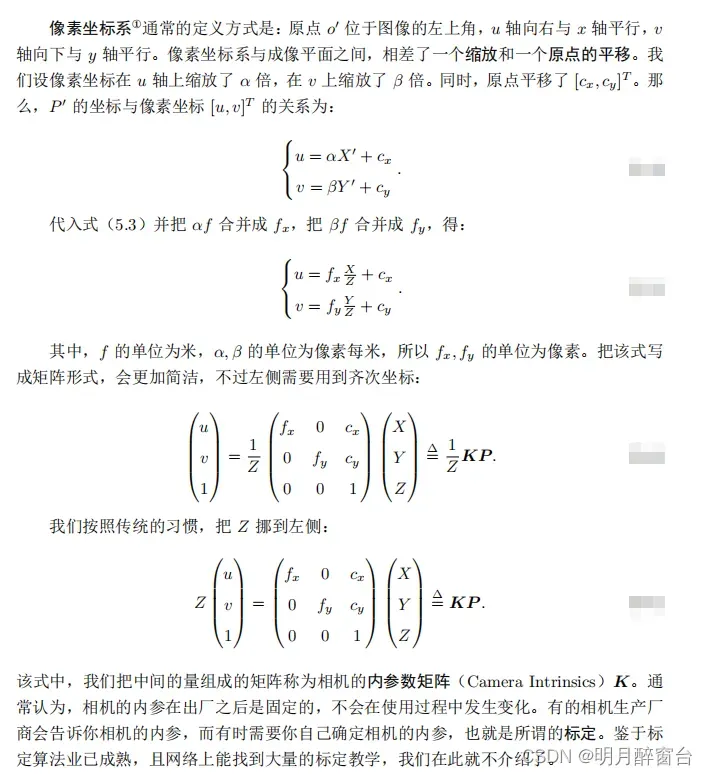
相机的内部参数是通过将外部的三维点投影到相机的内部成像平面上来形成的。
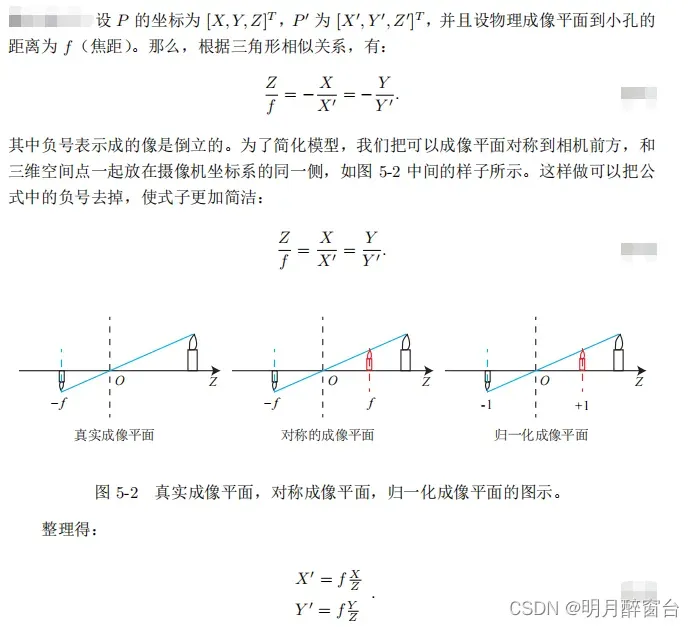
1.1 针孔相机模型
除了内参之外,自然还有相对的外参。考虑到我们使用的是 P 在相机坐标系下的坐标。由于相机在运动,所以 P 的相机坐标应该是它的世界坐标(记为 Pw),根据相机的当前位姿,变换到相机坐标系下的结果。相机的位姿由它的旋转矩阵 R 和平移向量 t 来描述。那么有
1.2 畸变
为了获得良好的成像效果,我们在摄像头前加了一个镜头。镜头的加入会对成像过程中的光传播产生新的影响:一是镜头本身的形状对光的传播的影响,二是在机械组装过程中,镜头和成像平面不能完全平行,这也会使光线通过镜头投射到成像面上时的位置发生变化。
由镜片形状引起的畸变称为径向畸变。在针孔模型中,一条线被投影到像素平面上
还是一条直线。但是,在实际照片中,相机的镜头往往会将真实环境中的直线变成画面中的曲线。越靠近图像边缘,这种现象就越明显。由于镜片的实际加工往往是中心对称的,这使得不规则畸变通常是径向对称的。主要分为桶形畸变和枕形畸变两大类,如图所示。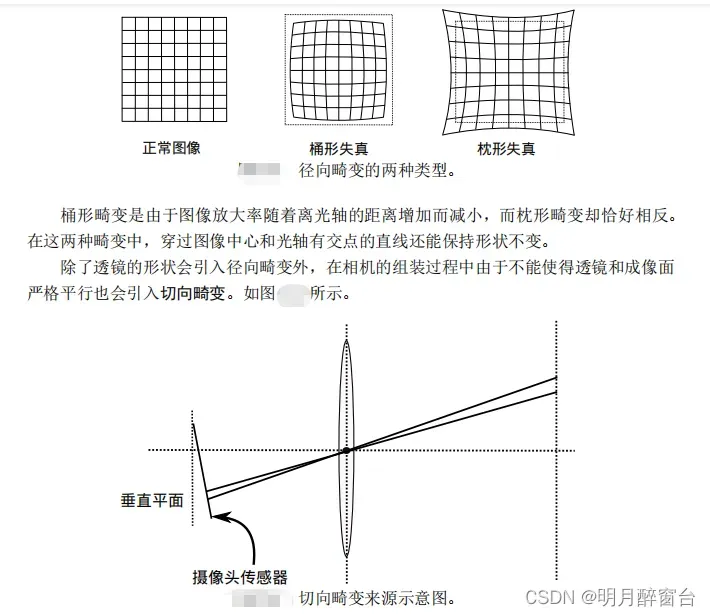
为更好地理解径向畸变和切向畸变,我们用更严格的数学形式对两者进行描述。我们知道平面上的任意一点 p 可以用笛卡尔坐标表示为 [x, y]T , 也可以把它写成极坐标的形式[r, θ]T,其中 r 表示点 p 离坐标系原点的距离,θ 表示和水平轴的夹角。径向畸变可看成坐标点沿着长度方向发生了变化 δr, 也就是其距离原点的长度发生了变化。切向畸变可以看成坐标点沿着切线方向发生了变化,也就是水平夹角发生了变化 δθ。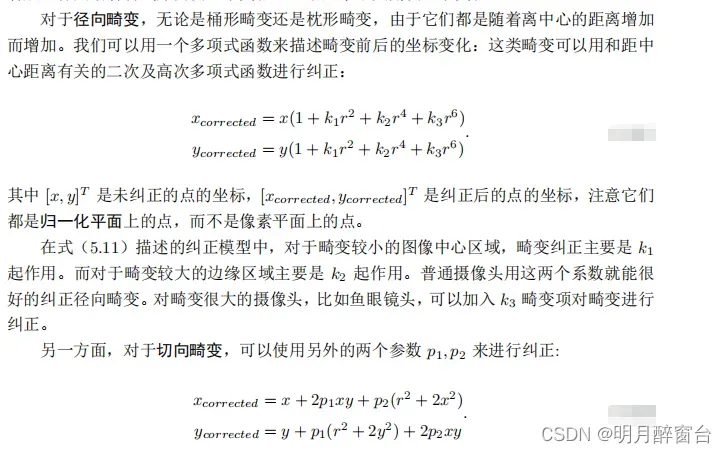
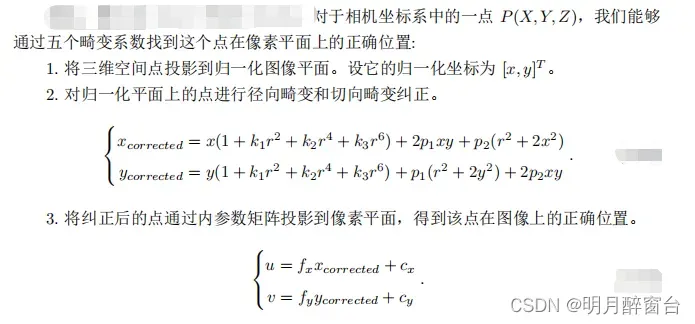
在上面的纠正畸变的过程中,我们使用了五个畸变项。实际应用中,可以灵活选择纠正模型,比如只选择 k1, p1, p2 这三项等。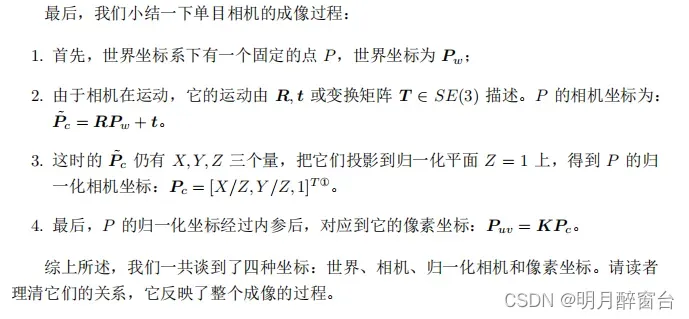
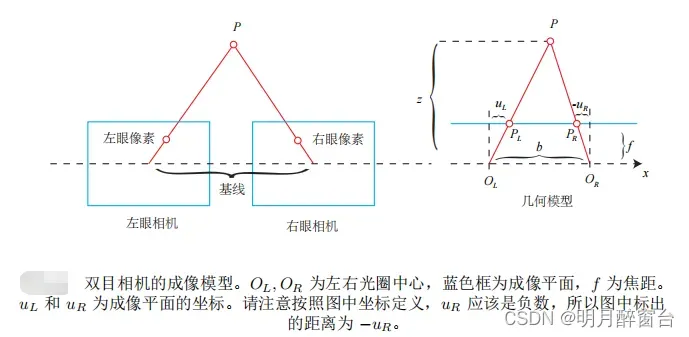
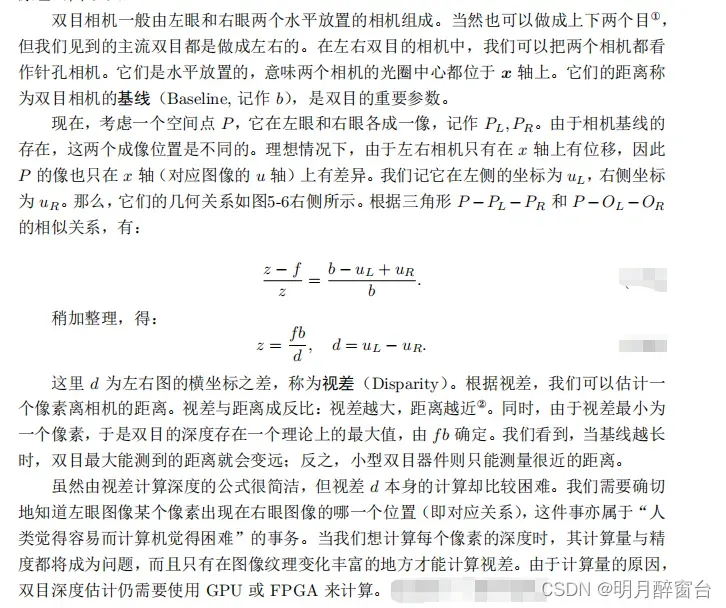
2.双目相机模型
3. RGB-D相机模型
相比于双目相机通过视差计算深度的方式,RGB-D 相机的做法更为“主动”一些,它能够主动测量每个像素的深度。目前的 RGB-D 相机按原理可分为两大类:
- 通过红外结构光(Structured Light)来测量像素距离的。例子有 Kinect 1 代、Project
Tango 1 代、Intel RealSense 等;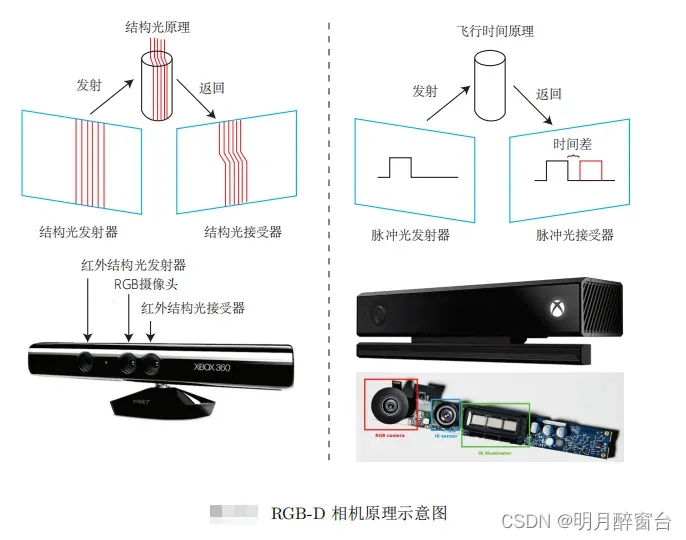
- 通过飞行时间法(Time-of-flight, ToF)原理测量像素距离的。例子有 Kinect 2 代和一些现有的 ToF 传感器等。
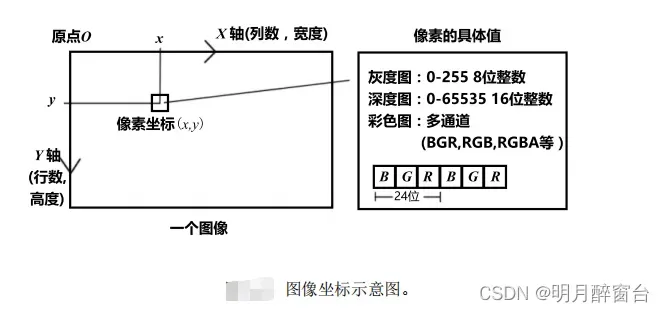
4. 图像
5. 实例:去畸变+3D点云重建
去翘曲:
#include<opencv2/opencv.hpp>
#include<string>
using namespace std;
using namespace cv;
string img_file = "./ distorted.png";
int main()
{
//也可用opencv的去畸变函数
//畸变参数
double k1 = -0.28340811, k2 = 0.07, p1 = 0.00019359, p2 = 1.76187114e-05;
//内参
double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;
Mat image = imread(img_file, 0);
int rows = image.rows, cols = image.cols;
Mat image_undistort = Mat(rows, cols, CV_8UC1);//去畸变以后的图
//计算去畸变以后的图像内容
for (int v = 0; v < rows; ++v)
{
for (int u = 0; u < cols; ++u)
{
//按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted,v_distorted)
double x = (u - cx) / fx, y = (v - cy) / fy;
double r = sqrt(x * x + y * y);
double x_distorted = x * (1 + k1 * r * r + k2 * r * r * r * r) + 2 * p1 * x * y + p2 * (r * r + 2 * x * x);
double y_distorted = y * (1 + k1 * r * r + k2 * r * r * r * r) + p1 * (r * r + 2 * x * x) + 2 * p2 * x * y;
double u_distorted = fx * x_distorted + cx;
double v_distorted = fy * y_distorted + cy;
//赋值(最邻近插值)
if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows)
{
image_undistort.at<uchar>(v, u) = image.at<uchar>(int(v_distorted), int(u_distorted));
}
else {
image_undistort.at<uchar>(v, u) = 0;
}
}
//imshow
imshow("distorted", image);
imshow("undistorted", image_undistort);
waitKey();
}
}
绘制点云重建
int main()
{
//内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
//基线
double b = 0.753;
//读取图像
Mat left = imread(left_file, 0);
Mat right = imread(right_file, 0);
Ptr<StereoSGBM>sgbm = StereoSGBM::create(0, 96, 9, 8 * 9 * 9, 32 * 9 * 9, 1, 63, 10, 100, 32);
Mat disparty_sgbm, disparty;
sgbm->compute(left, right, disparty_sgbm);
disparty_sgbm.convertTo(disparty, CV_32F, 1.0 / 16.0f);
//生成点云
vector<Vector4d, Eigen::aligned_allocator<Vector4d>>pointcloud;
for (int v = 0; v < left.rows; ++v)
{
for (int u = 0; u < left.cols; ++u)
{
if (disparty.at<float>(v, u) <= 10 || disparty.at<float>(v, u) >= 96.0)
continue;
Vector4d point(0, 0, 0, left.at<uchar>(v, u) / 255.0);//前三维xyz,第4维颜色
//根据双目模型计算point的位置
double x = (u - cx) / fx;
double y = (v - cy) / fy;
double depth = fx * b / (disparty.at<float>(v, u));
point[0] = x * depth;
point[1] = y * depth;
point[2] = depth;
pointcloud.push_back(point);
imshow("disparty", disparty / 96.0);
waitKey();
//画出点云
showPointCloud(pointcloud);
return 0;
}
}
}
其他参考:
0.相机模型:单目、双目、深度相机模型及相机畸变
1.机器人手眼标定 https://zhuanlan.zhihu.com/p/76578691
2.使用最小二乘法+SVD分解 求空间点集的变换矩阵–数学原理
3.Ax=0超定方程的最小二乘解(基于OpenCV、基于Eigen的SVD分解)
4.RANSAC、最小二乘法、DLT
文章出处登录后可见!