系列文章目录
【笔记】Linux 命令行
【笔记】.launch 文件语法记录
【笔记】CMakeLists.txt 文件语法记录
【笔记】Package.xml 文件语法记录
【笔记】ROS_c++ 语法记录
前言
最全面的教程还是得看这个:http://wiki.ros.org/roslaunch/XML
1、.launch 文件是什么?
通过 xml 标签语言实现 ROS 多节点的配置和启动,可自动启动 ROS Master 节点。最简单的文件举例 : simple.launch
<launch>
<node pkg="learning_communication" type="person_subscriber_node" name="talker" />
<node pkg="learning_communication" type="person_publisher_node" name="listener" />
</launch>
2、 标签 根标签
.launch 文件的<根元素标签,其他所有的标签都必须包含在根标签的范围内。表示标签作用域的结尾。
3、 标签 启动节点
用于启动节点。标签中各个参数的含义:
- pkg节点所在功能包名。
- type节点的可执行文件名。
- name节点运行时的名称,可与cpp文件中节点初始化时的节点名不同。 (rosnode list 打印出的就是这个名字,不过加了前缀斜杠 / )
- output (optional) =”screen” or =”log” ,默认不输出。
- respawn (optional) =”true” ,Restart the node automatically if it quits. 默认 =”false” 。
- required (optional) =”true” ,If node dies, kill entire roslaunch.
- ns (optional) =”foo” ,Start the node in the ‘foo’ namespace.
- args (optional) =”arg1 arg2″ ,Pass arguments to node.
4、 标签 设置参数1/3
设置ROS系统运行中的参数,存储在参数服务器中,相当于全局变量。(可嵌入
<param name="output_frame" value="odom" />
- name参数名。
- value(optional) 参数值。
- type (optional) =”str | int | double | bool | yaml” 。
5、 标签 设置参数2/3
加载 .yaml 文件中的多个参数,存储在参数服务器中,相当于全局变量。(可嵌入
<rosparam file="params.yaml" command="load" ns="params" />
- file() 。
- command() 。
- ns() 。
6、 标签 设置参数3/3
.launch 文件内部的局部变量,仅限于 .launch 文件使用。标签内各参数的含义:
<arg name="arg-name" default="arg-value" />
- name参数名。
- default(optional) 参数值。 可在之后 override。(变量)
- value(optional) 参数值。不可覆盖。 (常量)
调用
<param name="foo" value="$(arg arg-name)" />
<node name="node" pkg="package" type="type" args="$(arg arg-name)" />
7、 标签 重映射
重映射 ROS 计算图资源的命名,这是一种覆盖操作,一旦重映射之后,原来的名字就没有了。标签内各参数的含义:
<remap from="/turtlebot/cmd_vel" to="/cmd_vel" />
- from( ) 原名。
- to( ) 映射之后的命名。
8、 标签 嵌套
包含其他 .launch 文件,类似 C 语言的头文件包含。标签内各参数的含义:
<include file="$(dirname)/other.launch" />
- file( ) 包含的其他launch文件的路径。
9、案例 一 turtlesim_parameter_config.launch
此 .launch 文件定义如下:
<launch>
<param name="/turtle_number" value="2" />
<arg name="TurtleName1" defualt="Tom"/>
<arg name="TurtleName2" defualt="Danney"/>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node" >
<param name="turtle_name1" value="$(arg TurtleName1)"/>
<param name="turtle_name2" value="$(arg TurtleName2)"/>
<rosparam file="(find learning_launch)/config/param.ymal" commond="load" />
</node>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" output="screen" />
</launch>
- 文件建立过程:在已经存在的且没出过问题的工作空间下的 src 目录下新建了一个 learning_launch 的功能包。功能包创建时无脑包含了 roscpp rospy std_msgs std_srvs 四个依赖。
在 learning_launch 功能包路径下创建了 launch 路径来存放上述 turtlesim_parameter_config.launch 文件。
在 learning_launch 功能包路径下创建了 config 路径来存放 param.yaml 文件。 param.yaml 文件如下:
A : 123
B : "hello"
group :
C : 456
D : "world"
- 编译工作空间:编译 100% 通过。
- 运行 .launch 文件:
roslaunch learning_launch turtlesim_parameter_config.launch
- 运行 .launch 文件报错:
RLException: [/home/jyc/slam_ws/src/learning_launch/launch/turtlesim_parameter_config.launch] requires the ‘TurtleName1’ arg to be set
The traceback for the exception was written to the log file - 分析1:看上面的报错信息是 ‘TurtleName1’ 找不到,应该是能够定位到 .launch 文件 的第8行,然并卵,定位到了也不知该怎么解决。虽然不明白是哪里出了问题,但是感觉上来说,应该是 CMakeLists.txt 没配置好。
–解决方法1:对着 hcx 教程中的 CMakeLists.txt 文件找不同。
hcx 的 CMakeLists.txt 文件根本没动过,我也跟着去掉了上面的四个无脑依赖。(无果)
hcx 的 package.xml 文件也根本没动过,我也跟着去掉了上面的四个无脑依赖。(无果)
hcx 功能包下没有创建功能包时自动生成的 include 和 src 文件夹,因此我也将这两个文件夹删了。(无果) - 分析2:上面的方法均无果,开始怀疑是不是自己的 .launch 文件代码敲错了。
–解决方法2:对着 hcx 教程中的 .launch 文件开始对照。
我没有看两次,但我真的找到了。
居然在第7行少写了一个代表标签结尾的斜杠
. (我总是忘记写这个斜线,稍后我会小心检查是否有错误)。欣喜若狂的时候,修改代码,编译,运行,报错:
RLException: Invalid roslaunch XML syntax: mismatched tag: line 12, column 6
The traceback for the exception was written to the log file
11行还真有错误 (由此可见终端数对源文件的行数是从 0 开始数的), find 左边的左括号前少了个 $ , yaml 拼写错误, command 拼写错误。并且还发现上面的“欣喜若狂”:
居然在第7行少写了一个代表标签结尾的斜杠
这是将正确的代码更改为错误的代码😄。修改上面的代码后,还是报错,还是原来的错误:
RLException: [/home/jyc/slam_ws/src/learning_launch/launch/turtlesim_parameter_config.launch] requires the ‘TurtleName1’ arg to be set
The traceback for the exception was written to the log file
索性就把导致报错的 8、9 行注释掉,因为这个 .launch 文件读的多了,基本也能看懂 8、9 行不会影响两个节点的启动。注释完之后再运行,终于能够实现两个节点的功能了,但是在终端打印的信息中夹杂着两行警告:
WARNING: [/home/jyc/slam_ws/src/learning_launch/launch/turtlesim_parameter_config.launch] unknown attribute ‘defualt’
WARNING: [/home/jyc/slam_ws/src/learning_launch/launch/turtlesim_parameter_config.launch] unknown attribute ‘defualt’
这就好办了,感情是 4、5 行的 default 拼写错了!改正之后,编译,运行。得到了正确的运行结果,且没有错误没有警告。
9.1 学习这个 .launch 文件
正确的代码在这里:
<launch>
<param name="/turtle_number" value="2" />
<arg name="TurtleName1" default="Tom" />
<arg name="TurtleName2" default="Danney" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node" >
<param name="turtle_name1" value="$(arg TurtleName1)"/>
<param name="turtle_name2" value="$(arg TurtleName2)"/>
<rosparam file="$(find learning_launch)/config/param.yaml" command="load" />
</node>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" output="screen" />
</launch>
- 打开文件后先看
标签,通过 标签可以知道这个 .launch 文件都启动了哪些节点、干了哪些事儿。在终端运行以下代码。可以看到,在 .launch 文件 7、14 行分别启动了 /turtle_teleop_key 和 /turtlesim_node 两个节点。(
更详细的 rosnode 用法,请参考【笔记】Linux命令行)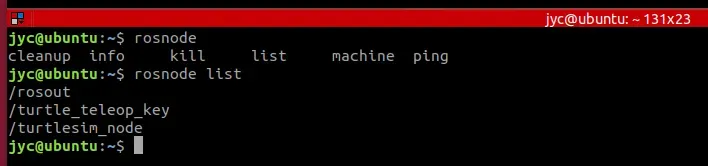
- 第一个节点启动了海龟仿真器,并且在节点内部定义了两个参数,其参数值来自 .launch 文件 4、5 行
标签定义的变量。节点内部还加载了 param.yaml 文件,① 解释说明了 标签可用于一次性加载多个参数。② 标签定义的变量为限于 .launch 文件内部的局部变量,因此无法在 rosparam list 命令中显示(
更详细的 rosparam 用法,请参考【笔记】Linux命令行)。③节点内定义的 param,会加节点名作用域。.yaml 内定义了作用域的话,也会在 rosparam list 后体现出来,如上述 .yaml 文件中定义了一个名叫 group 的作用域。④ .launch 文件中定义的的全局 param,在ROS参数服务器中也是全局参数,而且经测试发现,此 param 的 name 前缀是否有斜杠 / 、不论有几个斜杠 /,存到ROS参数服务器中,都会是一个斜杠 / 前缀。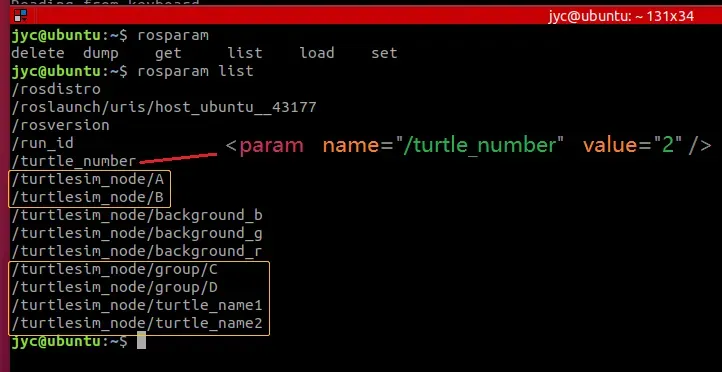
- 第二个节点启动了海龟仿真的键盘控制节点,需要注意的是 output=”screen” 节点,通过这个设置,被设置的节点得以在终端打印输出。有此设置和无此设置的区别:
也算了结了一个疑惑,使用 rosrun 一个一个地运行节点,节点可以在终端打印数据,那使用 roslaunch 同时启动多个节点时,该打印谁的数据呢?谁设置了 output=”screen” 就打印谁的数据呗,都设置了就都打印,只是这样会看起来比较乱 (经验证确实如此)。(
更详细的 rosrun、roslaunch 用法,请参考【笔记】Linux命令行)。
10、案例 二 turtlesim_remap.launch
此 .launch 文件定义如下 :
<launch>
<include file="$(find learning_launch)/launch/simple.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<remap from="/turtle1/cmd_vel" to="/cmd_vel"/>
</node>
</launch>
- 使用
标签包含了 sinple.launch 文件,因此运行此 .launch 文件,会首先运行 sinple.launch 文件,再运行本 .launch 文件剩余的内容。
疑问:.launch 文件是按从上到下的顺序,顺序启动节点的吗? - 使用
标签,节点内部将 /turtle1/cmd_vel 话题重映射为了 /cmd_vel ,因为本节点为此话题的接收者,因此本节点将不能收到由键盘控制节点发出的 /turtle1/cmd_vel 话题。而键盘控制节点发送 /turtle1/cmd_vel 话题不受影响。 - 提醒:目前我不太敢用
标签,因为怕改了之后忘记自己改了啥。但是以后如果考虑到程兼容性,应该还是会使用这个标签的。
总结
Markdown使用的空格:
表示半角空格(英文)
表示全角空格(中文)
将字体颜色更改为红色
左右尖括号:< >
定义锚点:跳到这里
跳转到锚点:点击跳转

文章出处登录后可见!
已经登录?立即刷新