图像分割
所谓图像分割,是指根据灰度、颜色、纹理、形状等特征,将图像分割成几个不重叠的区域,使这些特征在同一区域看起来相似,而在不同区域则明显。不同之处。经典的数字图像分割算法通常基于灰度值的两个基本特征之一:不连续性和相似性。
传统的图像分割方法
- 基于阈值的分割法:阈值法的基本思想是将图像中每个像素点的灰度值与基于一个或多个灰度阈值的阈值进行比较,最后根据比较结果将像素点分类为合适的类别结果。
- 基于边缘的分割方法:所谓边缘是指图像中两个不同区域的边界线上连续像素的集合,是图像局部特征不连续性的反映,反映了图像的特征灰度、颜色和纹理等图像。突变。
基于阈值的分割
设定某一灰度阈值T,能将图像分成两部分:大于T的像素群和小于T的像素群定一个合适的阈值就可准确地将图像分割开来。算法的关键是确定合适的阈值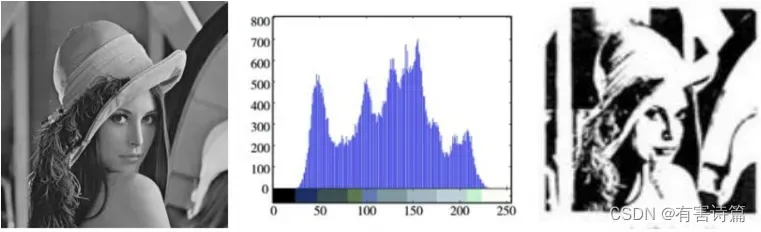
基于边缘的分割方法
基于边缘检测的图像分割方法的基本思想是首先确定图像中的边缘像素点,然后将这些像素点连接在一起形成需要的区域边界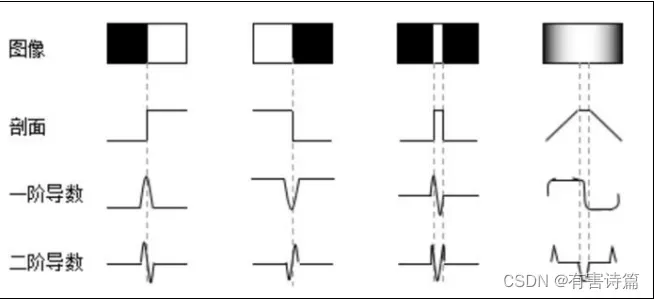
基于区域的分割方法
该类方法根据相似性准则将图像划分为不同的区域,主要包括种子区域生长法、区域分割合并法和分水岭法等几种类型。
基于图论的分割方法
此类方法把图像分割问题与图的最小割(mincut)问题向关联。首先将图像映射为带权无向图,图中每个节点对应于图像中的每个像素,每条边的权值表示了相邻像素之间在灰度,颜色或纹理方面的非负相似度
区域生长法
区域生长是根据预先定义的准则将像素或子区域聚合成更大区域的过程,需要充分保证划分的区域满足以下条件:内部连通性、互斥性、并集子集可以形成完整的作品。区域增长的条件实际上是根据像素灰度之间的连续性定义的一些相似性准则,区域增长停止的条件是终止规则。
该算法定义了最大像素灰度值距离。当待添加像素的灰度值与分割区域内所有像素的平均灰度值之差的绝对值不大于最大像素灰度值距离时,将该像素点添加到该区域被划分为,相反,区域增长算法停止
分水岭算法
分水岭算法是一种图像区域分割方法。分水岭算法可以将图像中的边缘转化为山脉,将均匀区域转化为山谷。这对分割目标没有帮助。在分割过程中,它将与相邻像素相似。可以作为重要的参考依据,从而将空间位置相近、灰度值相近(对于梯度)的像素点连接起来,形成一个闭合的轮廓
分水岭算法的操作步骤:对彩色图像进行灰度化,然后得到梯度图;最后在梯度图的基础上进行分水岭算法得到分割图像的边缘线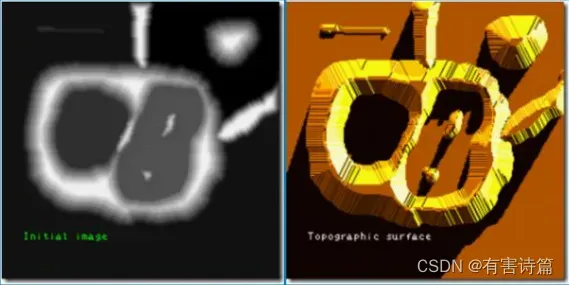
Graph Cuts分割
GraphCuts是基于图论的分割方法。第一种普通顶点对应于图像中的每个像素。每两个邻域顶点(对应于图像中每两个邻域像素)的连接就是一条边,另外两个叫终端顶点,叫S(source:代表前景)和T(sink:代表背景)。每个普通顶点和这2个终端顶点之间都有连接,组成第二种边。
Graph Cuts中的Cuts是指这样一个边的集合,该集合中所有的边的断开会导致残留“S”和“T”图的分开,所以就称为“割”
如果一个割的所有边的权重之和最小,则称为最小割,它是图割的结果。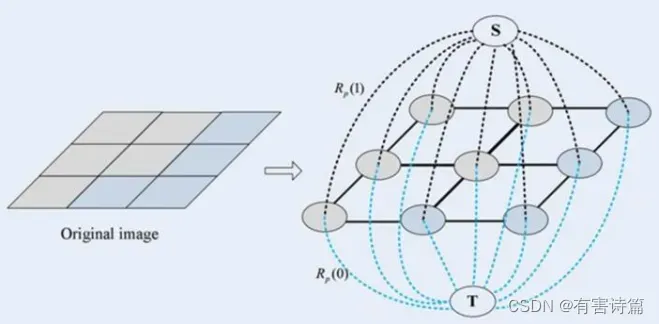
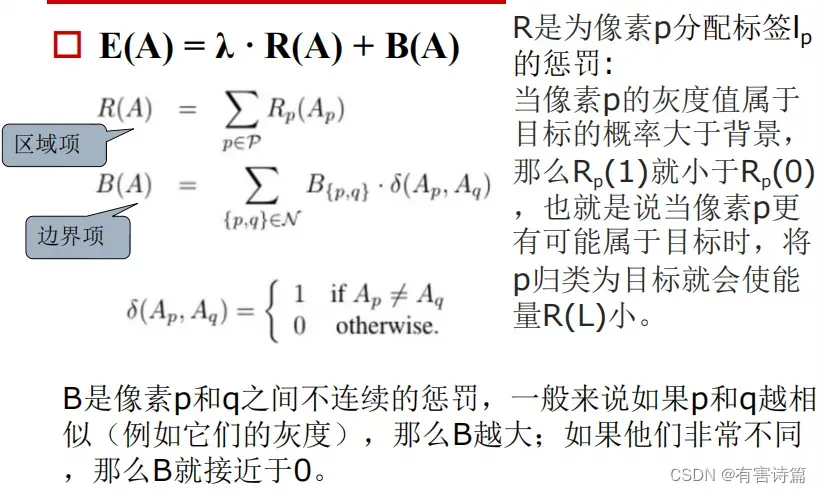
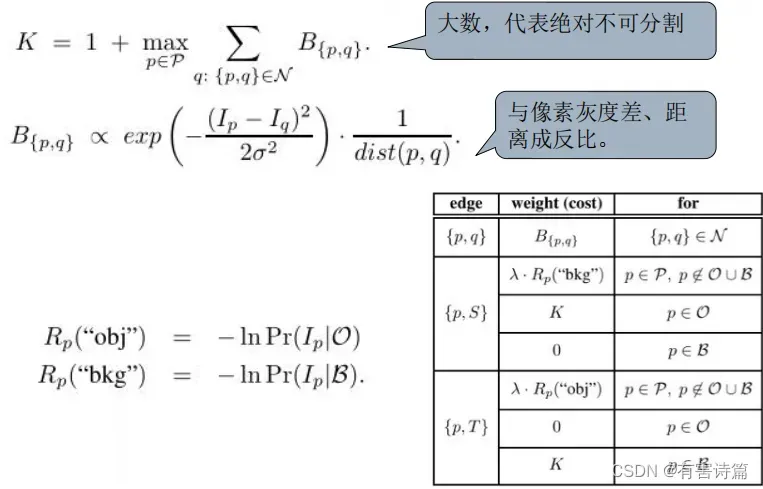
首先取两个种子点,然后我们构建一个图,图中边的粗细代表对应权重的大小,然后求权重和最小边的组合,完成图像分割的功能。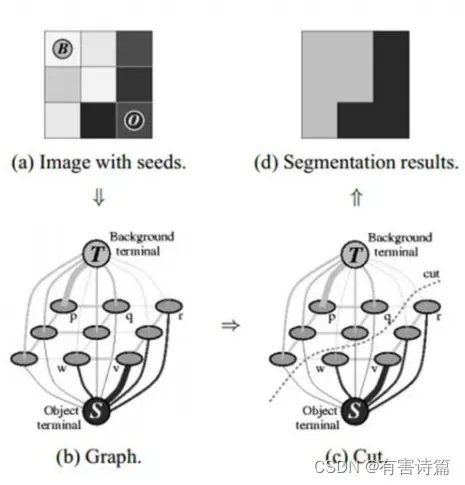
前景/背景的颜色模型:假定前景和背景为高斯混合模型(GMM),对于每个像素,要么来自于目标GMM的某个高斯分量,要么就来自于背景GMM的某个高斯分量。用边界项来体现邻域像素之间不连续惩罚,如果两邻域像素差别很小,那么他们属于同一个目标或者同一背景的可能性很大,反之则可能是边缘;通过K-means算法迭代获得
GMM:两组点分别通过两个不同的正态分布随机生成而来。如果没有GMM,那么只能用一个的二维高斯分布来描述,显然,这不太合理。应该用两个不同参数的正态分布来描述。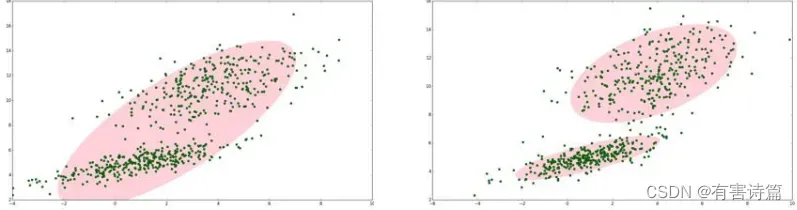
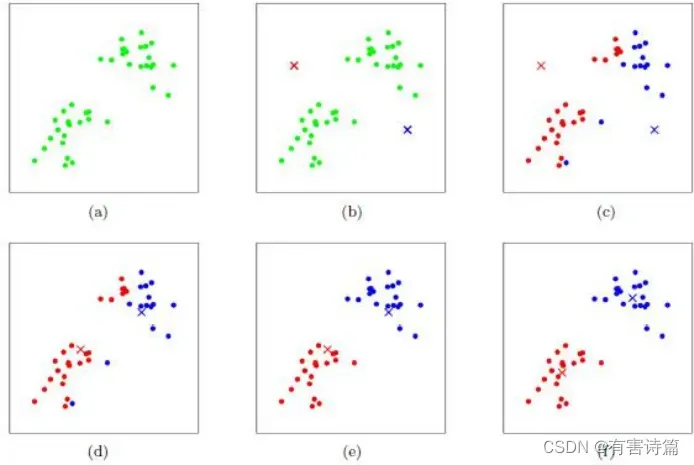
Kmeans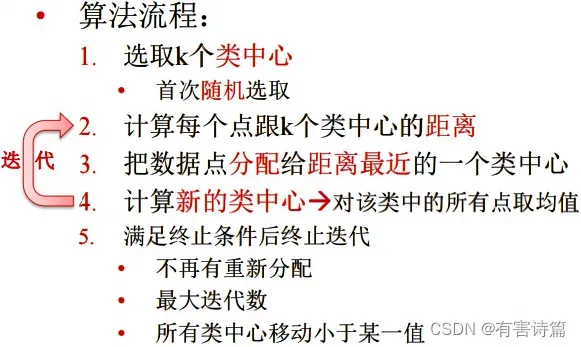
关于K-Means的几个问题:
K值怎么定?:主要取决于经验,通常是多尝试几个k值,看分成几类的结果更好解释,更符合分析目的等。
初始的K个质心怎么选:最常用的方法是随机选,初始质心的选取对最终聚类结果有影响,因此算法一定要多执行几次,哪个结果更合理,就用哪个结果。有一些优化的方法,例如:选择彼此距离最远的点。
K-Means会不会陷入一直选质心的过程:
不会,K-Means一定会收敛,大敛思路是利用SSE的概念(也就是误差平方和),可证明这个函数是可以最终收敛的函数。
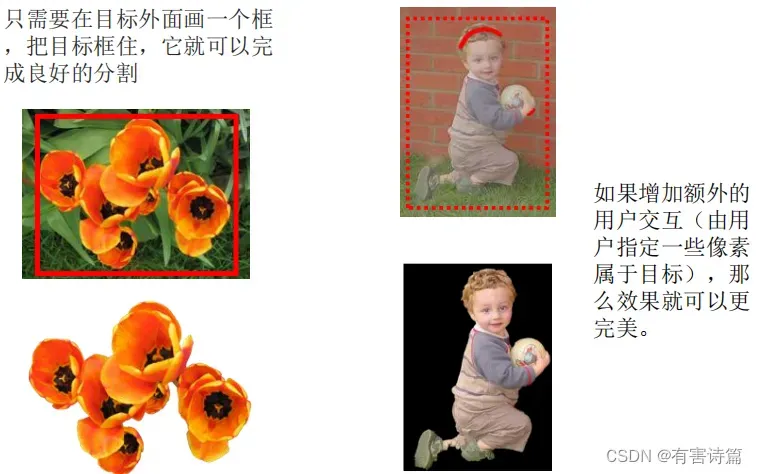
GrabCut分割
迭代进行GraphCuts:优化背景和前景的颜色模型,能量随着不断迭代变小,分割结果越来越好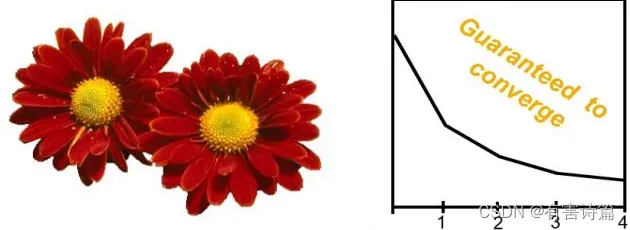
GrabCut分割流程:使用标记初始化颜色模型(K=5),迭代进行Graph Cut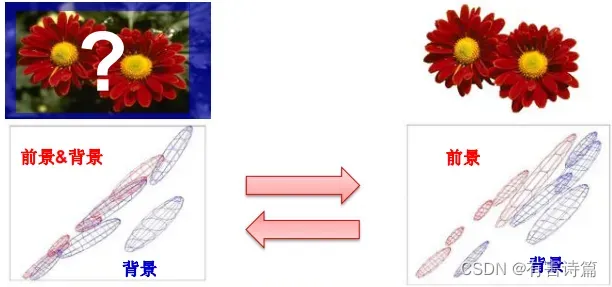
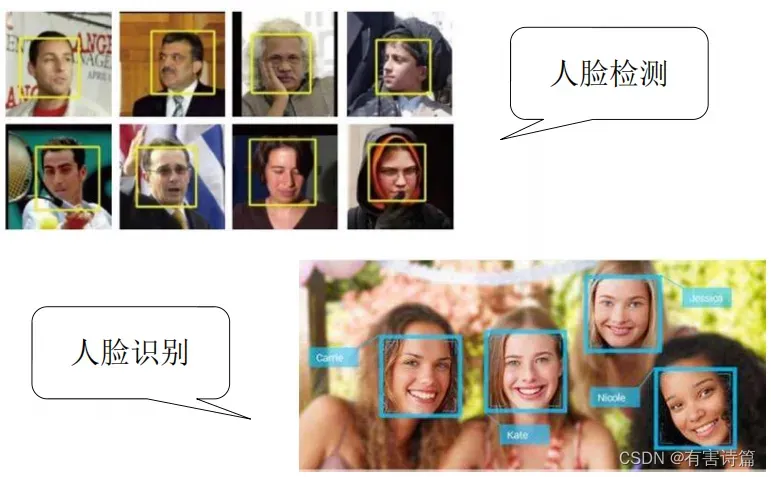
人脸检测
Haar-like特征
特征模板内有白色和黑色两种矩形,并定义gaimoban该模板的特征值为白色矩形内的像素和减去黑色矩形内的像素和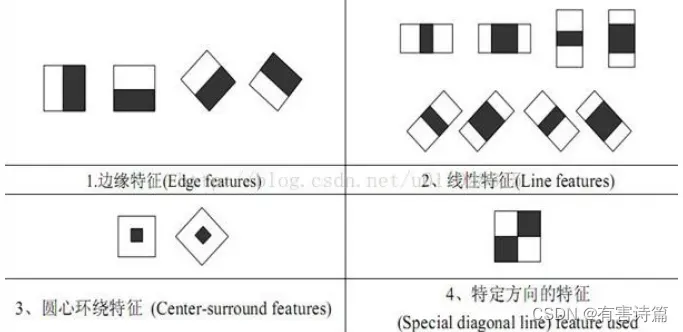
同一个像素如果被包含在不同的Haar-like的特征模板中,会被重复计算计算很多次。积分图是根据四个角点就能计算区域内的像素之和的方法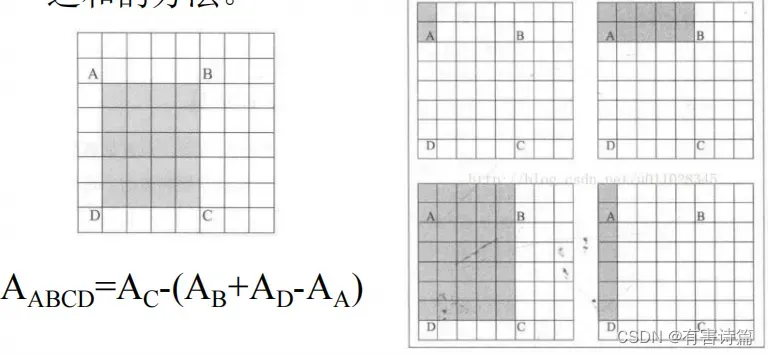
Haar-like模板可表示出人脸的某些特征。例如:中间一幅表示眼睛区域的颜色比脸颊区域的颜色深;右边一幅表示鼻梁两侧比鼻梁的颜色要深
要选多少个Harr-like特征:不同的模板(15种),不同的位置,不同的缩放(长宽比固定或可变的)
Haar级联分类器
Adaboost是一种基于级联分类模型的分类器,级联分类器就是将多个强分类器连接在一起进行操作,每一个强分类器都由若干弱分类器加权组成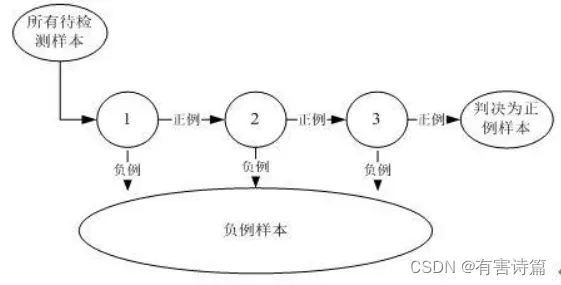
Boosting分类器示意
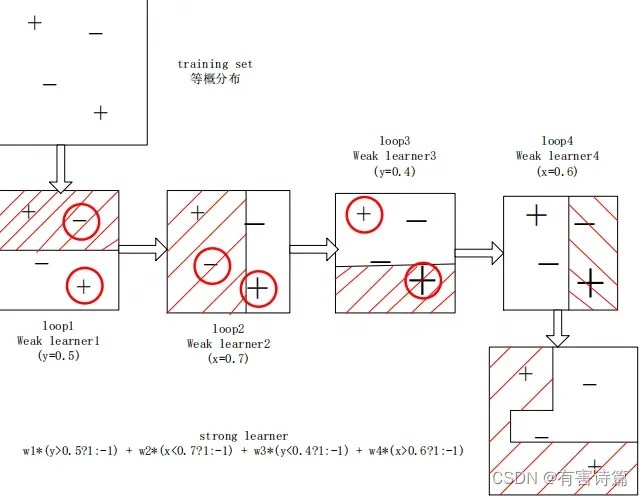
弱分类器和强分类器
弱分类器就是在这海量的特征中选取一个特征,用这个特征能够区分出人脸or非人脸,且错误率最低。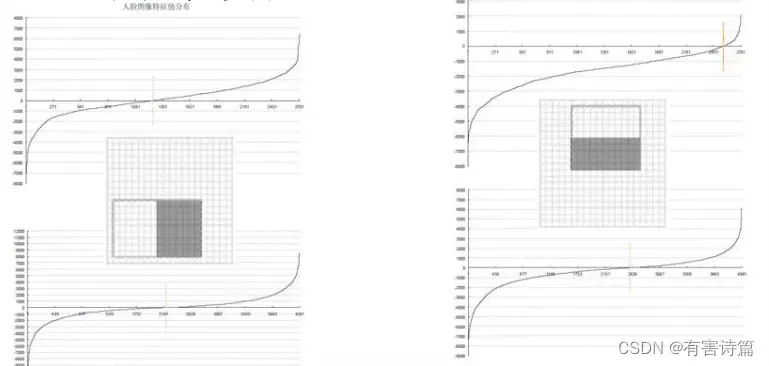
一个弱学习器的要求仅仅是:它能够以稍低与50%的错误率来区分人脸和非人脸图像。训练一个弱分类器就是在当前权重分布的情况下,确定f的最优阈值,使得这个弱分类器对所有训练样本的分类误差最低。最后将每轮得到的最佳弱分类器按照一定方法提升(Boosting)为强分类器
级联分类器的检测机制
级联分类器中的每个强分类器对“非人脸”(即负样本)都比较敏感,所以每次被强分类器拒绝时,几乎可以肯定不是人脸。所有强分类器都经过测试后,它是人脸,一张图像中很多要检测的区域都是负样本,只有正样本会被送到下一个强分类器进行重检,这样在级联分类器的前期丢弃了很多分类器。负样本的复杂检测。因此,级联分类器的速度非常快”
梯度是一个向量
梯度是一个向量
Gx是沿X方向上的梯度,Gy是沿y方向上的梯度,梯度的幅值及方向角可表示如下:
一维离散差分模板简单、快速、有效地计算图像的梯度信息。公式如下:
HOG(方向梯度直方图)
梯度计算,分别计算水平和垂直梯度,对于彩色图,选择梯度幅度最大的通道
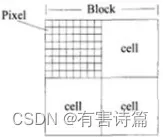
Block拆分,16×16的Block,步长是8,50%的重合,包含2×2个Cell,每个Cell是8X8
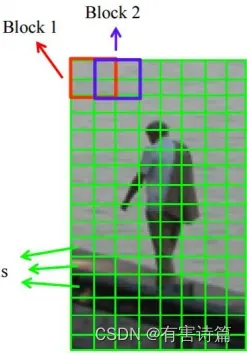
计算Cell的梯度方向直方图,9个方向bin,积累梯度幅值,使用位置高斯加权,相邻bin使用线性插值。串接所有Block直方图
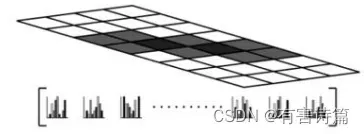
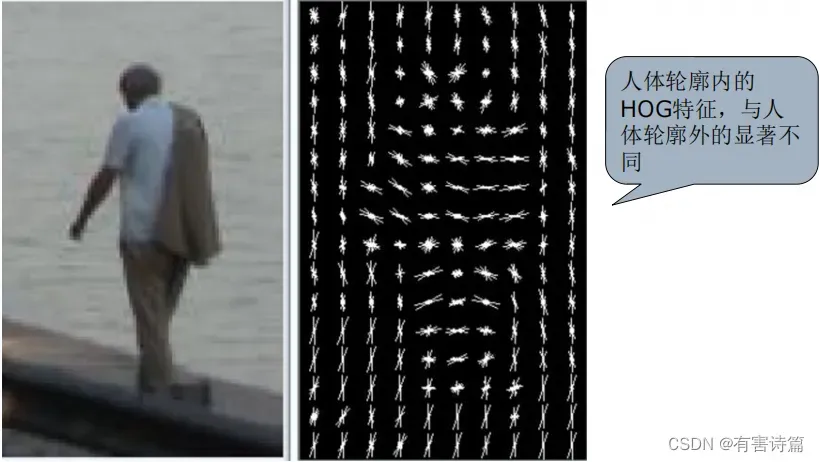
HOG:对比度归一化
梯度幅值绝对值的大小容易受到前景与背景的对比度和局部光照的影响。为了减少这种影响,必须对局部单元单元进行对比归一化。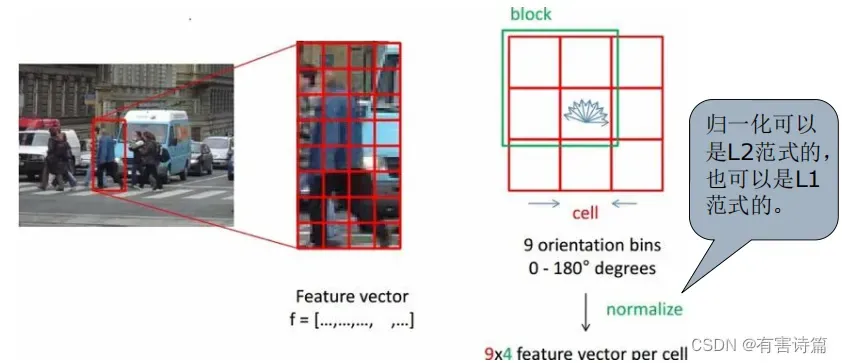
对比度归一化的办法是:把各个细胞单元组合成大的,空间上连通的区间block,在归一。这样,HOG描述符就变成了由各区间所有细胞单元的直方图成分所组成的一个向量。这些区间都是互有重叠的,这就意味着:每一个细胞单元的输出都多次作用于最终的描述器。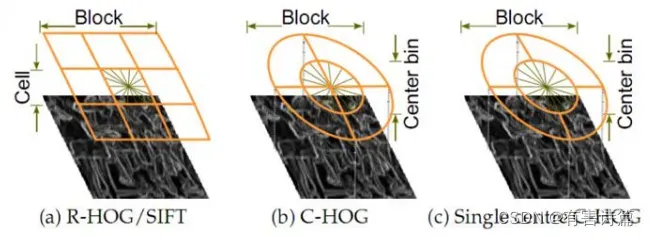
HOG的步骤
将整个图像进行Gamma空间,颜色归一化,计算图像梯度,构建方向的直方图,将细胞单元组合成大的区间,收集HOG特征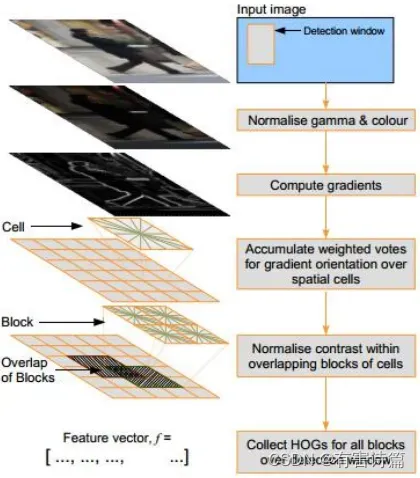
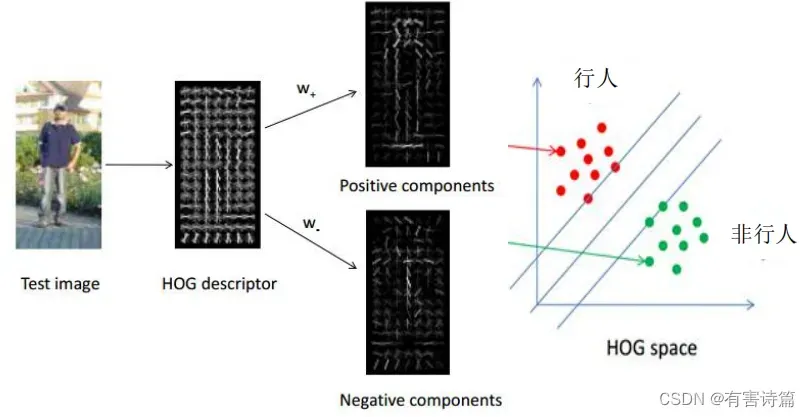
行人的HOG特征
SVM基本模型
支持向量机基本模型是针对线性可分情况下的最优分类界面提出的。在这一条件下,正类和反类训练样本可用超平面完全正确的分开。满足上述条件的分界面就是最优分界面,经过两类样本中距离最优分类面最近的点,且平行与最优分界面的超平面H1,H2(边界超平面)上的训练样本称为支持向量,即图中带圈的点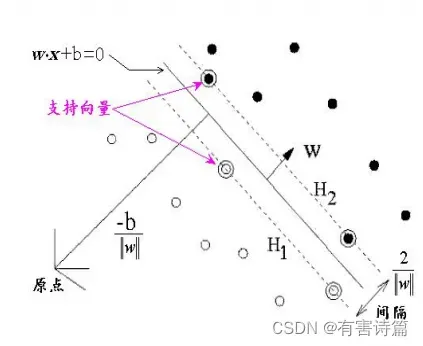
带约束条件的极值问题
约束极值问题可以根据最近距离之和最大和两类样本正确分离这两个条件构造: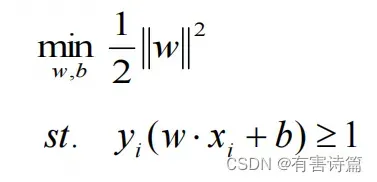
**通过拉格朗日乘子法和拉格朗日乘子的引入,可以将有约束的极值问题转化为比较简单的对偶问题。通过寻求对偶问题的最优解,可以得到原问题。问题的最优解。
**
松弛变量
由于噪声或其他因素的影响,两类数据可能有少数的融合或交叉。引入松弛变量x使得分类器在训练后仍可以存在一些错分样本,不但要使两类样本之间的间隔尽量大,同时还要使错分的样本的松弛变量之和尽可能的小,即
其中,x为松弛变量,满足xi >= 0,C为大于零的折中因子,它调和了间隔距离和错分赝本数之间的关系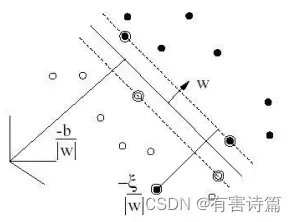
映射到高维空间
线性不可分数据问题的解决方法是将线性不可分数据映射到低维空间到高维线性可分空间。支持向量机通过非线性映射函数将数据从低维空间映射到高维空间,为高维空间中的状态数据构造一个线性分离超平面。分离超平面对应于原始特征空间上的一个分割超曲面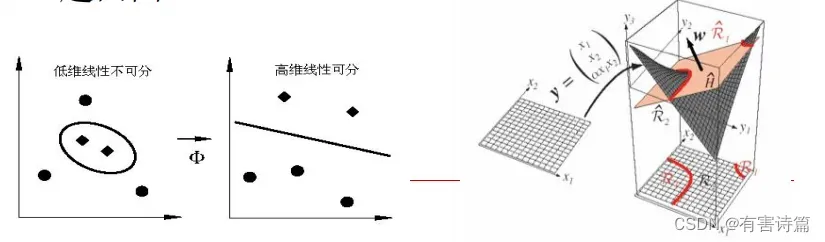
用SVM区分行人与非行人的HOG特征
DPM
Deformable Part Model(可变形的组件模型),是一种基于组件的检测算法。该模型有Felzenszwalb提出,连续获得PASCAL VOC07,08,09年检测冠军。为此Felzenszwalb获得2010年PASCAL VOC的终身成就奖
该模型包含了一个8X8分辨率的根滤波器(Root filter),和4×4分辨率的组件滤波器(Part filter),右图为其高斯滤波后的2倍空间模型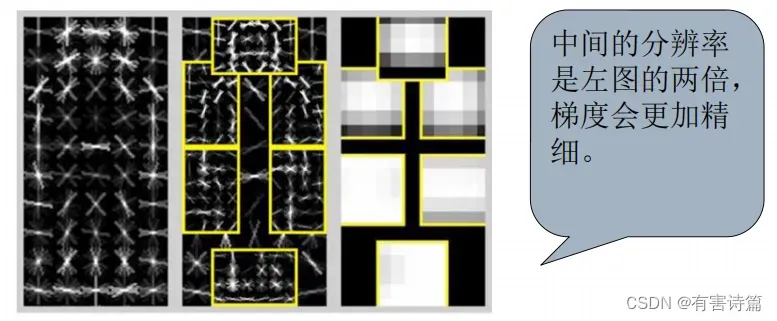
自行车的DPM
左图:自行车整体模型的HOG
中图:使用了6个子模型,白色矩形框出来的区域就是一个子模型
右图:偏移Cost,圆圈中心就是子模型的理性位置,偏离的越远Cost越大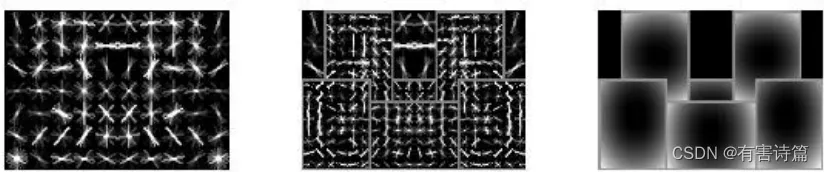
响应分数
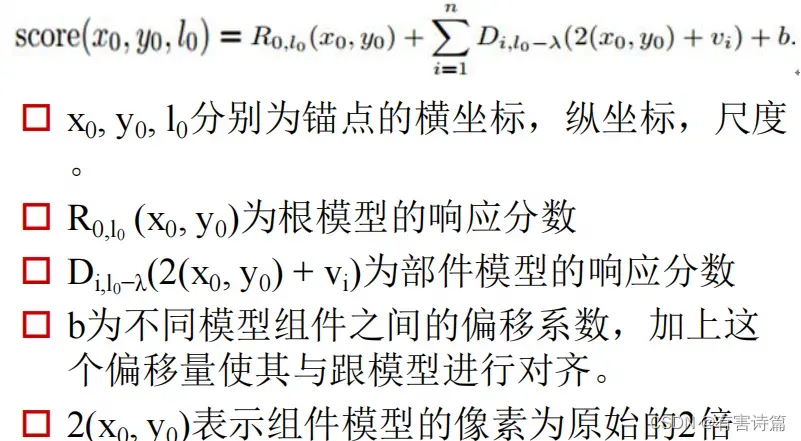
DPM的特征整理
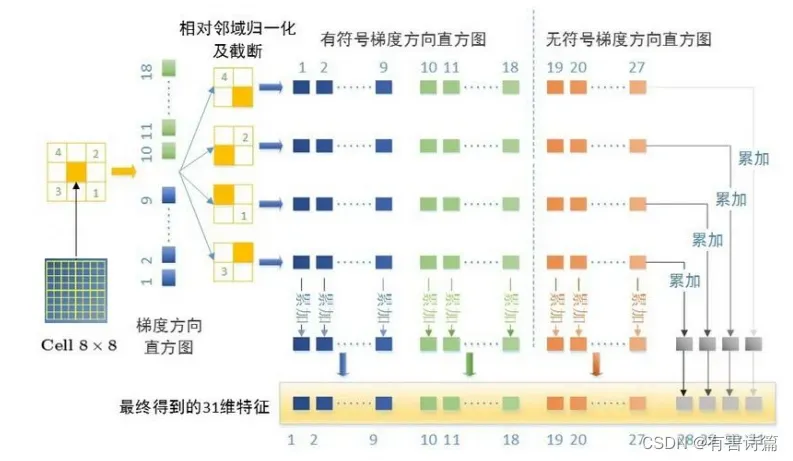
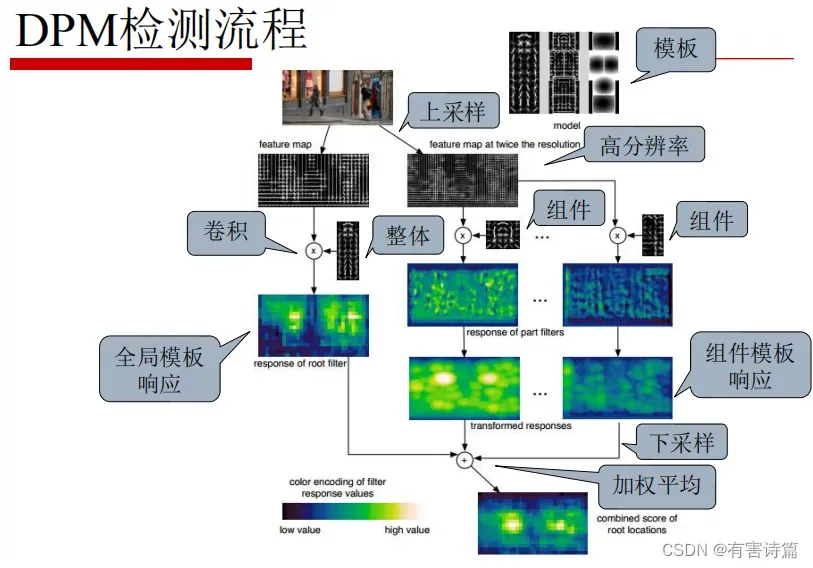
DPM检测流程
**对于任意一张输入图像,提取其DPM特征图,然后将原始图进行高斯金字塔上采样,然后提取其DPM特征图。对于原始图像的DPM特征图和训练好的Root filter做卷积才做,从而得到Root filter的响应图。对于2倍图像的DPM特征图,和训练好的Part filter做卷积操作,从而得到Part filter的响应图。然后对其精细高斯金字塔的下采样操作,这样Root filter的响应图和Part filter的响应图就具有相同的分辨率了。然后将其加权平均,得到最终的响应图。亮度越大表示响应值越大 **
DPM检测流程
Multiple-instance SVM
思想是将标准SVM的最大化样本间距扩展为最大化样本集间距。具体来说是选取正样本集中最像正样本的样本用作训练。同时取负样本中离分界面最近的负样本作为负样本。因为目标是要保证正样本中有正,负样本不能为正。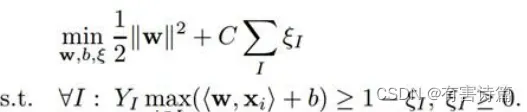
Latent SVM
Latent-SVM实质上和MI-SVM是一样的。区别在于扩展了Latent变量。首先解释下Latent变量,MI-SVM决定正样本集中哪一个样本作为正样本的就是一个latent变量。不过这个变量的取值只是正样本集中的序号而已。DPM中也是要选择最大的正样本,但是它的latent变量就很多。比如bounding box的实际位置,在HOG特征金字塔中的level,某样本属于哪一类component。也就是说有了一张正样本的图片,标注了boundingbox,我们要在某一位置,某一尺度,提取出一个最大正样本作为某一component的正样本。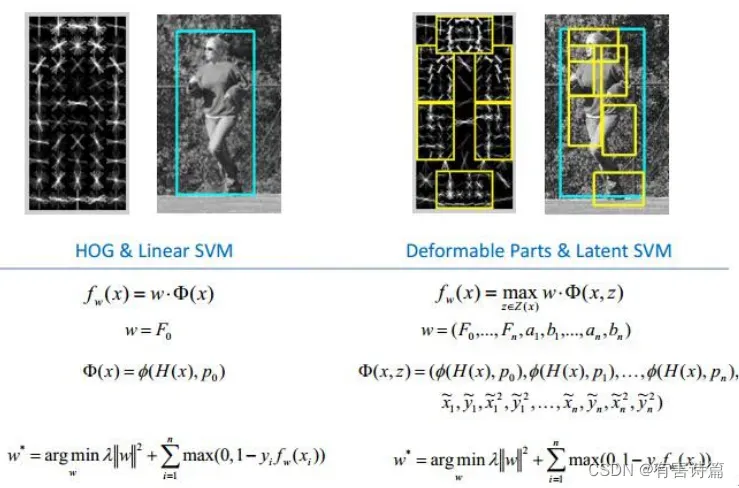
文章出处登录后可见!