ros是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。
它包含了大量工具软件、库代码和约定协议,旨在简化跨机器人平台创建复杂、鲁棒的机器人行为这一过程的难度与复杂度。
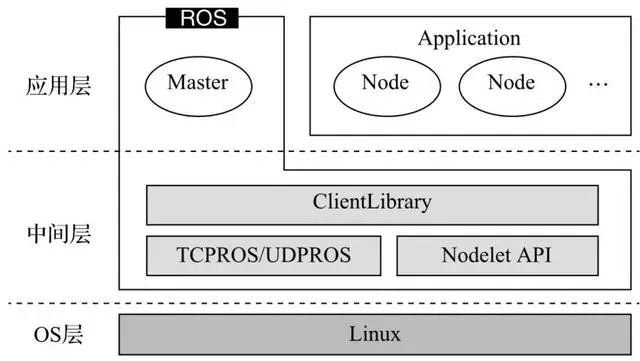
ROS提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。ROS是基于一种图状架构,从而不同节点的进程能接受,发布,聚合各种信息(例如传感,控制,状态,规划等等)。
ROS可以分成两层,低层是上面描述的操作系统层,高层则是广大用户群贡献的实现不同功能的各种软件包,例如定位绘图,行动规划,感知,模拟等等。
学习教程链接如下:
文章出处登录后可见!
已经登录?立即刷新