Shadow Mapping
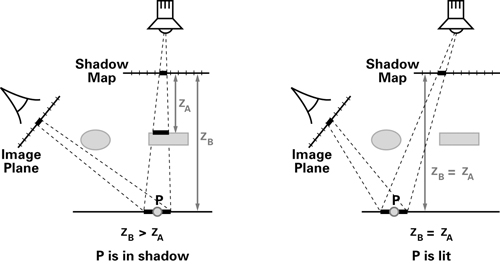
在确定遮挡关系的时候, z-buffer的深度值是相对于摄像机镜头,也就是眼睛所见来确定物体是否被遮挡,这个很容易理解。眼睛能看不见的地方,当然被挡住了。那我们换个角度想想,阴影是如何产生的?
通过移动视口到光源位置,可以观察到这个位置每个东西都是明亮的,因为从光的角度来看是没有阴影的。从光源的角度将场景的深度渲染到一张深度缓冲区中,我们可以在场景中获得一张阴影或者无阴影的贴图,一张阴影贴图。
软硬阴影
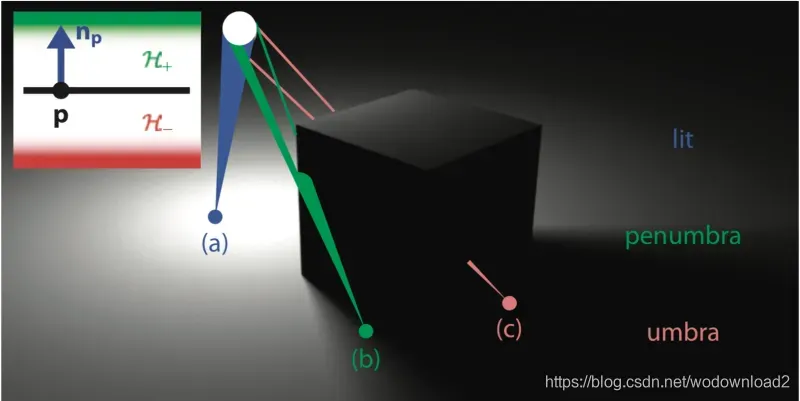
在下面的图中,a点与光源之间没有任何物体遮挡,因此是照亮(lit)的。而地面也就是接受者(receiver)上的 c 点被遮挡者(occluder)立方体遮挡,处于本影区(umbra)。b 点处于被部分遮挡形成的半影区(penumbra)。
光线追踪
为什么选用光线追踪?
光栅化并不能很好的描述全局效果,比如软阴影、间接光照。
光栅化质量不高但特别快,光线追踪则相反。因此主要是离线运算,比如电影等
图形学关于光线的几个假设
- 光线沿直线传播
- 光线之间不发生碰撞
- 光线由光源向眼睛传播
光线跟物体的互动
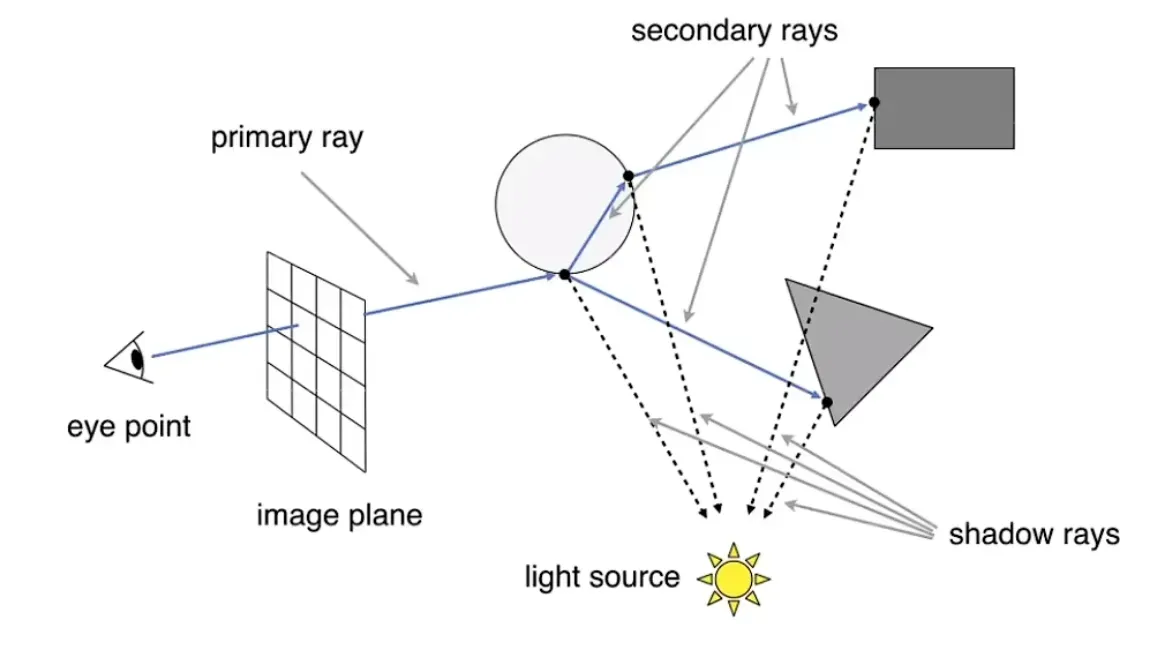
Whitted-Style光线追踪
几个shadow rays的着色结果都会加回到image plane上
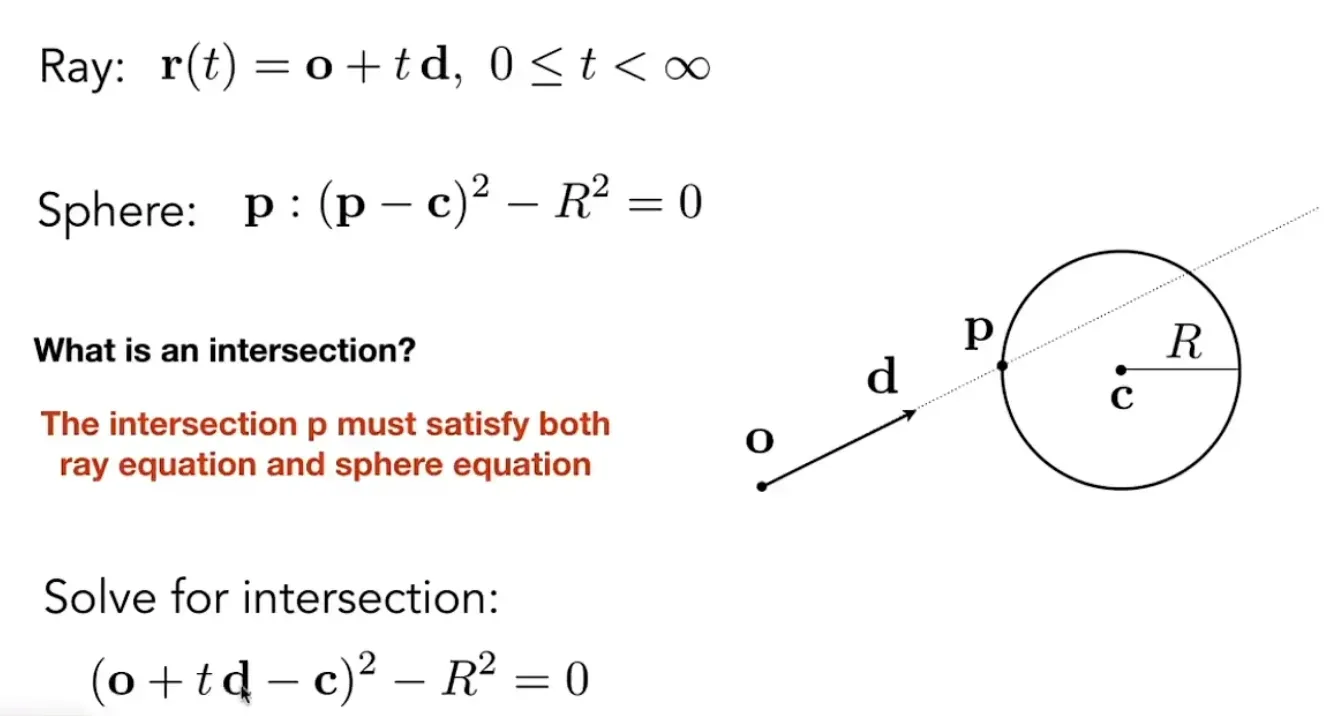
跟隐式表面
跟三维空间中的球面
跟显式表面
跟三角形面
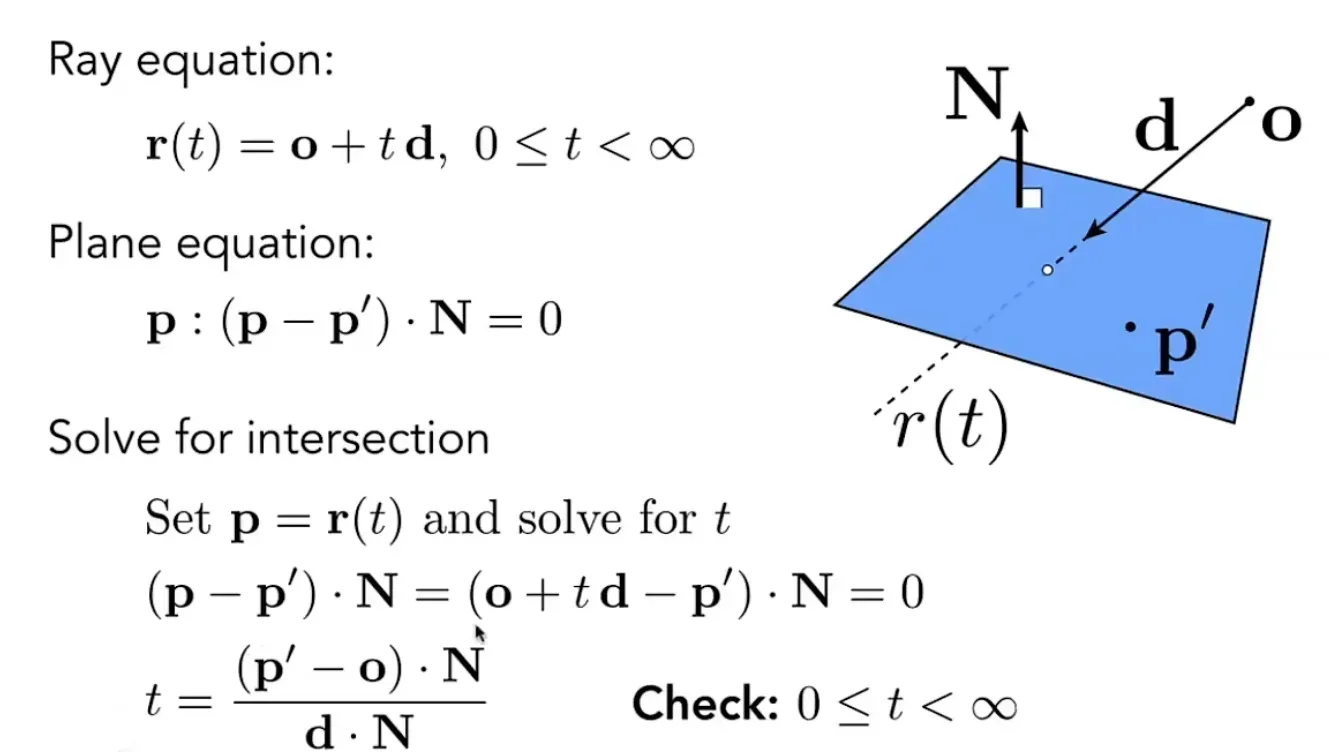
先考虑跟三角形所在的平面求交(与平面上另一点组成的向量与平面法向量垂直),在考虑交点是否在三角形内
包围盒(Bounding Volumes)
将一个包围盒将物体完全包含,如果光线连包围盒都碰撞不了就不用计算与三角形面的碰撞,减少了
那么我们如何计算光线和方块状物体交互
使用三组对面来描述长方体
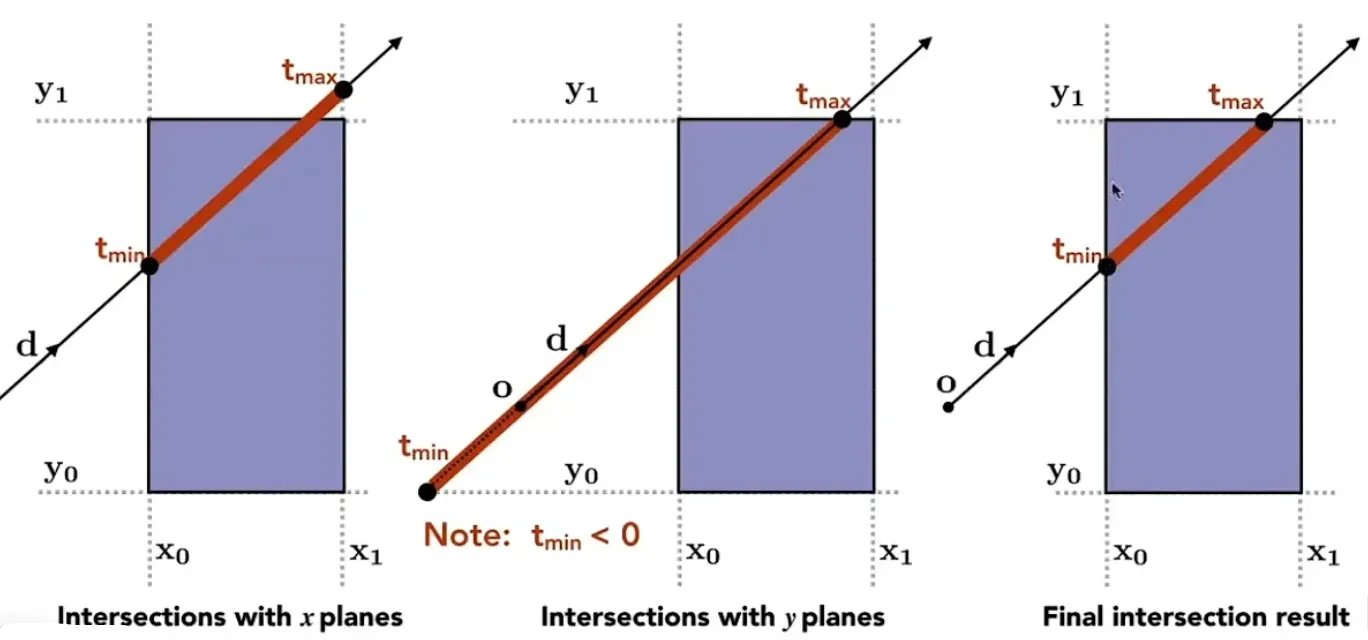
t_enter= max{t_min} t_exit=min{t_max},已经进入三个对面才算进入盒子,只要离开一个对面就算出去盒子
为啥使用轴对称(Axis-Aligned Bounding Boxes)
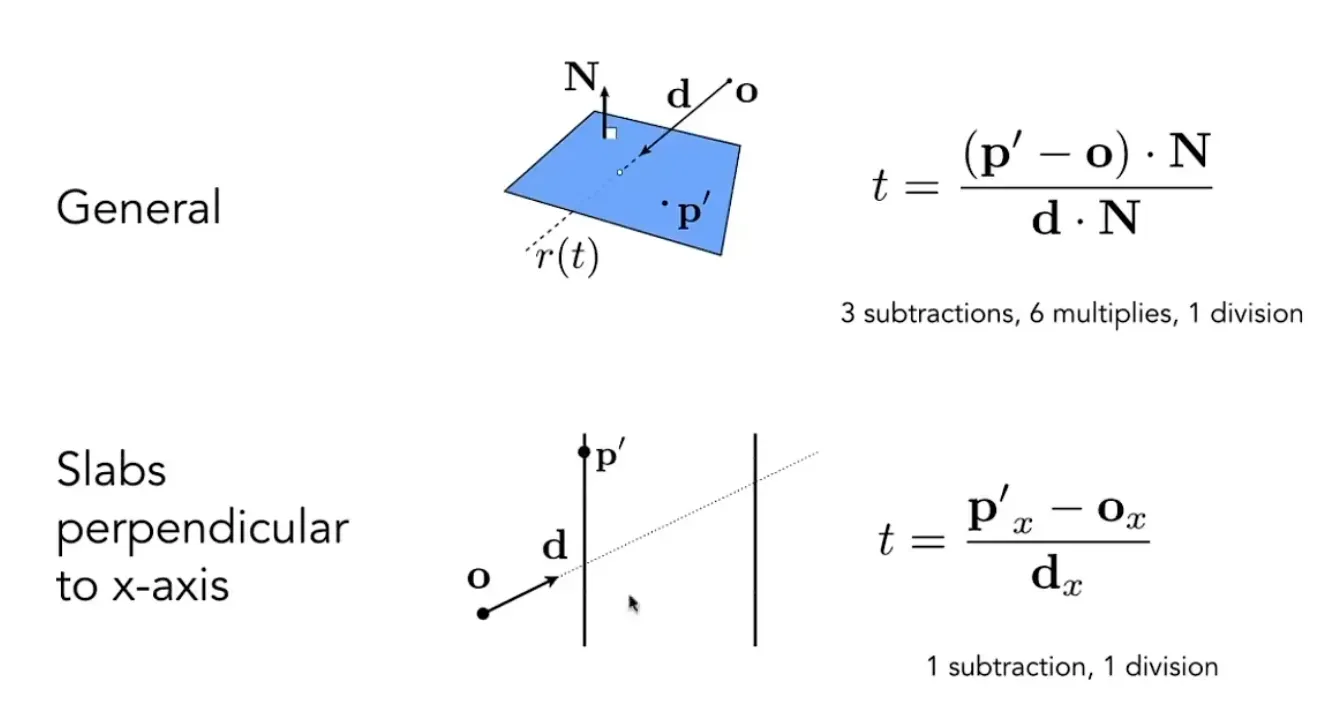
减少了大量运算
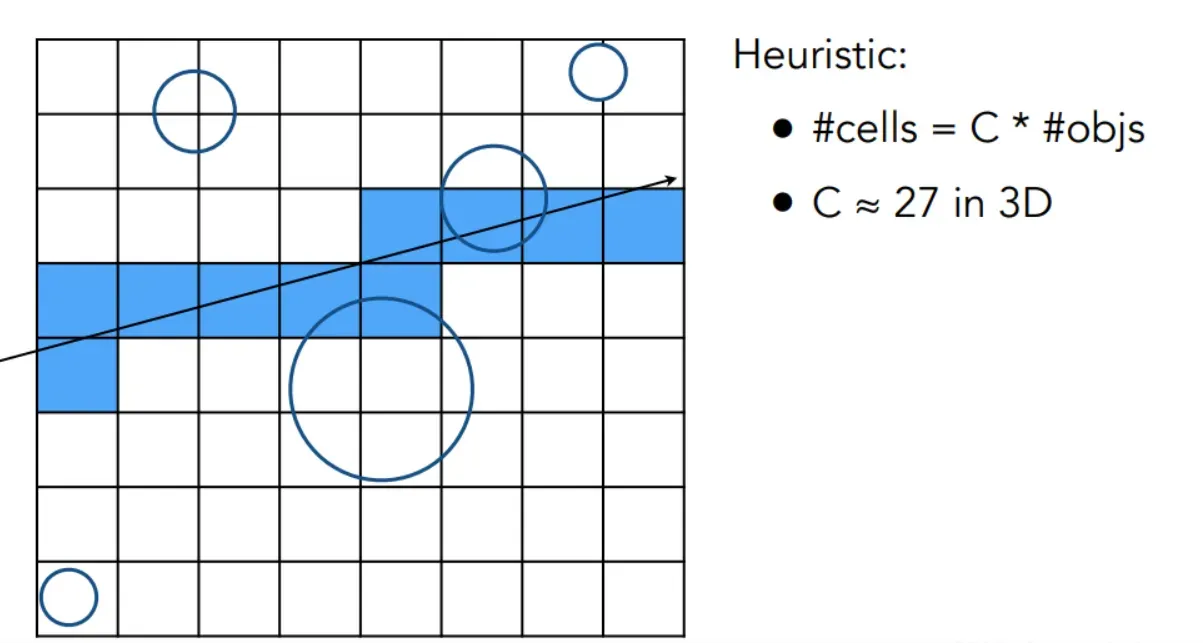
网格划分
1.找出包围盒
2.创建网格
3.存储与物体重叠的网格
与网格计算求交比物体快很多,只有光线经过有物体的网格才需要与物体求交
空间划分
网格划分仅在场景中物体分布较均匀的时候有较好效果
一个真实的场景中经常有一大块的空白区域,这一大块空白其实可一用一个大格子来覆盖,而其他物体稠密的区域仍然用小格子。
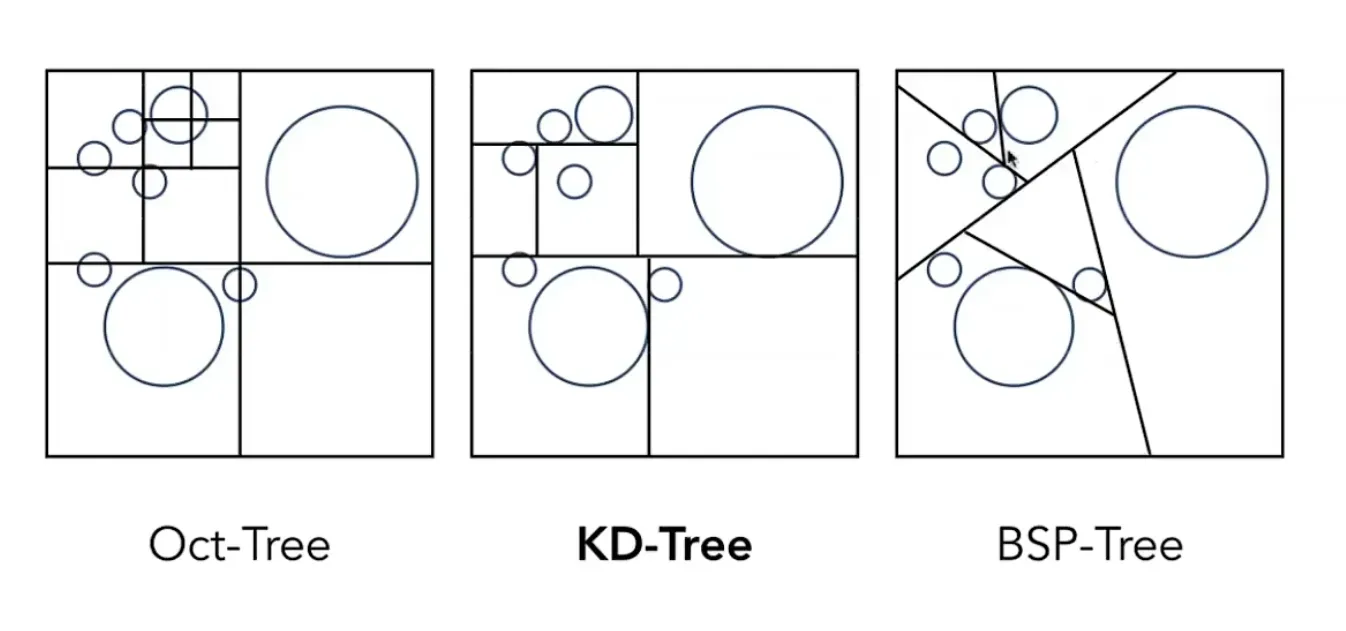
Oct-Tree:八叉树,对于三维空间中的一个场景将其横竖切三刀,切成八块,在二维空间表现为四叉。它的意思就是把包围盒切成四块,然后对于每一个子节点在切成四块,当格子是空的或者格子里面物体足够少时就停止。但是对于高维空间不好划分。
KD-Tree:类似二叉树,每次将包围盒分成两份,每次都是沿着某个轴的方向进行分割,并且分割顺序是x->y->z ->x->y->z……这样循环往复。
BSP-Tree:也是每次划分选择一个方向将空间分成两部分,与KD-Tree相比它不是横平竖直的划分,不好计算
KD—Tree
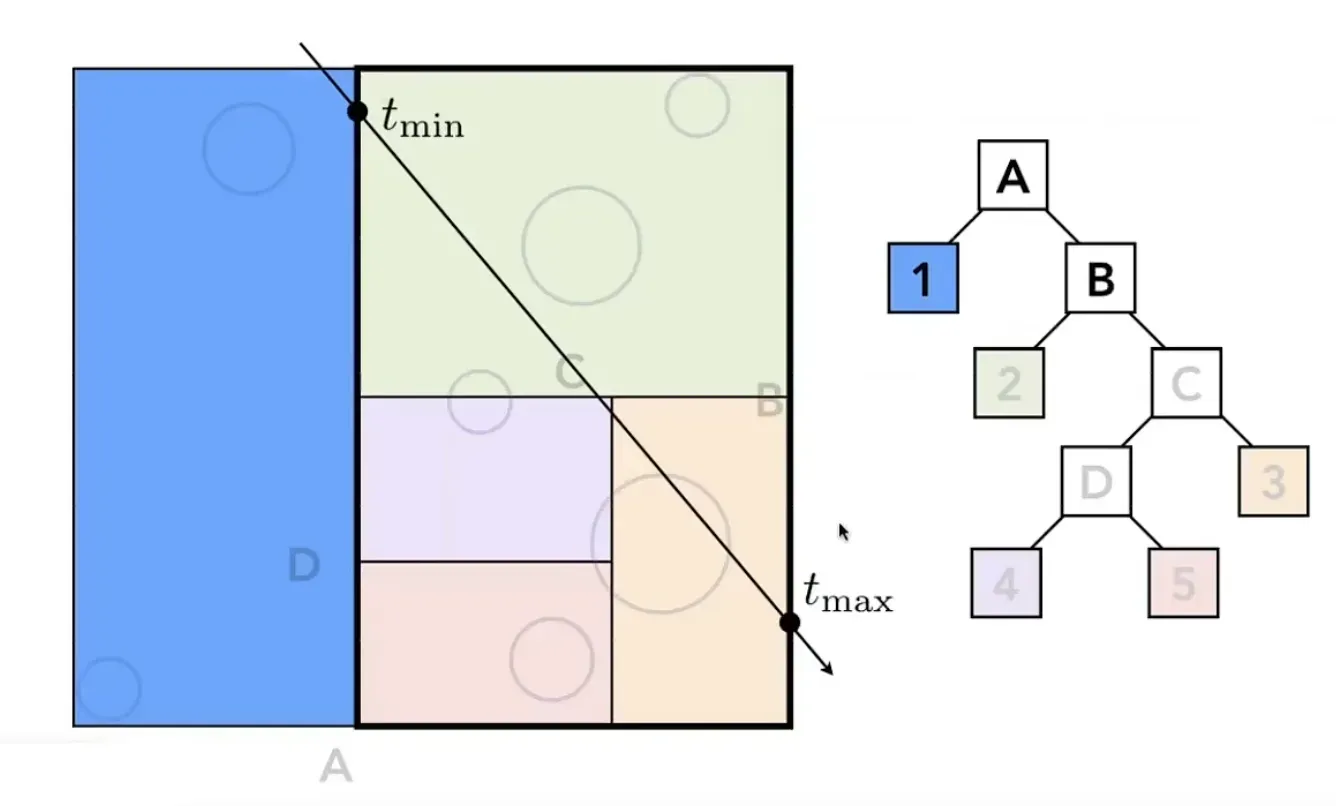
首先检查光线和场景中最大的包围盒A是否有交点
每次到达叶子结点(规定区域内物体少于多少就不再划分)就与其中的物体求交
可以发现4号区域和5号区域光线没有经过,所以不要和里面的物体进行求交,加速了计算速度。
KD-Tree也有很多缺点:
- 很难判定一个三角形和包围盒有交集
- 一个物体可能会在多个格子里,那么在这些格子都要保存这个物体,最后判断这个物体和光线是否相交也要执行很多次。
层次包围盒Bounding Volume Hierarchy(BVH)
BVH按照物体而不是空间来划分
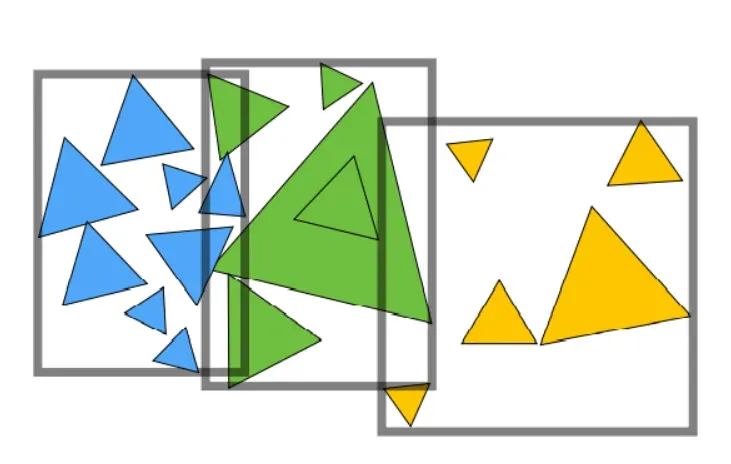
BVH先将物体分为两部分在重新求包围盒,而不是像KD—Tree一样像划分包围盒在考虑物体与盒子的相交情况
划分的依据
- 为了让包围盒在空间中均匀分布,每次都沿着最长的轴划分。
- 在第中位数个三角形的位置进行划分,这两部分里面的三角形数量差不多相同,也就是要构造一个平衡二叉树
辐射度量学(basic radiometry)
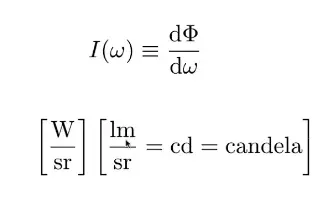
radiant intensity(辐射通量)
定义:单位立体角上的功率
立体角(solid angle): 辐射的面积除以到圆心的平方——可以形容一个锥展开有多大
candela:发光强度单位
lumen:是描述光通量的物理单位,物理学解释为一candela在一个立体角(半径为1米的单位圆球上,1平米的球冠所对应的球锥所代表的角度,其对应中截面的圆心角约65°)上产生的总发射光通量
也可以使用瓦特(W)表示,单位时间内的能量(Q)
Irradiance(辐照度)
定义: 单位面积上的功率(面与光线垂直)
radiance(辐亮度)
在单位立体角、单位面积上的功率
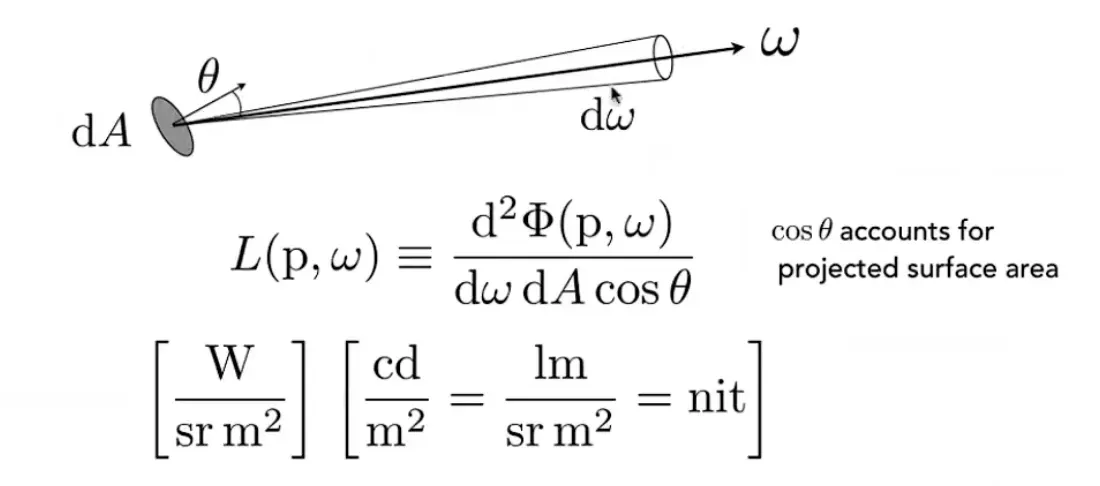
单位面积(d A)在某个方向上的辐射
Bidirectional Reflectance Distribution Function(BRDF)-双向反射分布函数
反射方程:
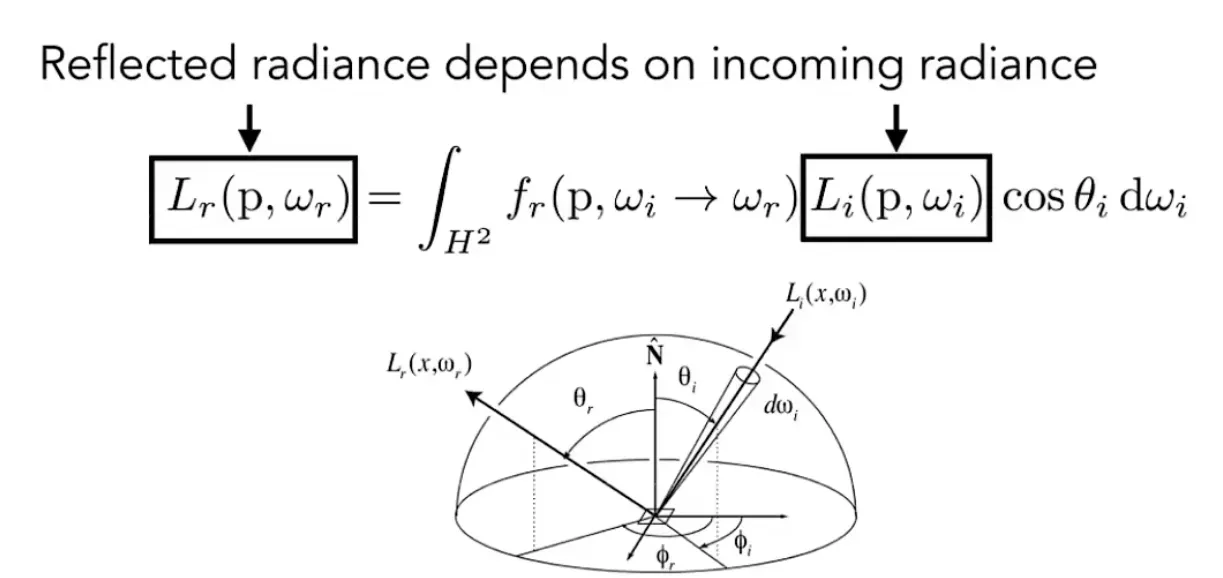
但是则会只考虑了光源,其他物体反射的光不会产生影响
渲染方程:
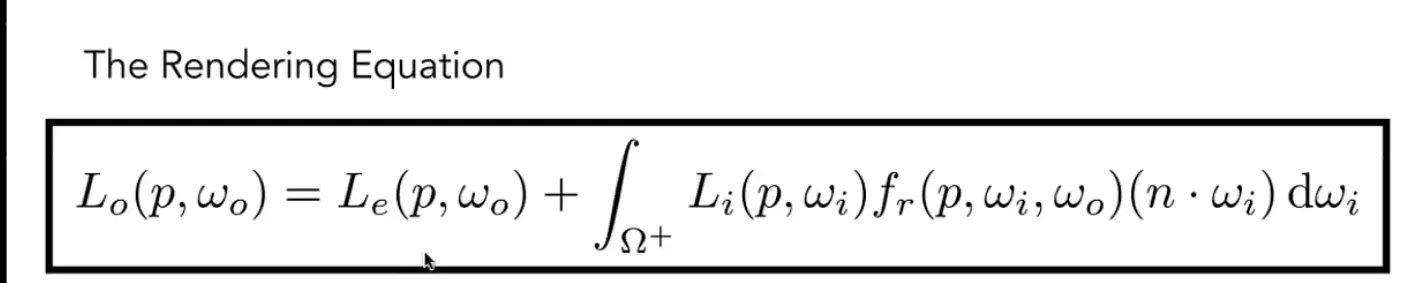
在反射方程基础上加上自身发光
渲染方程不再区分光线是由光源发出还是由物体反射,都把他们当作光源
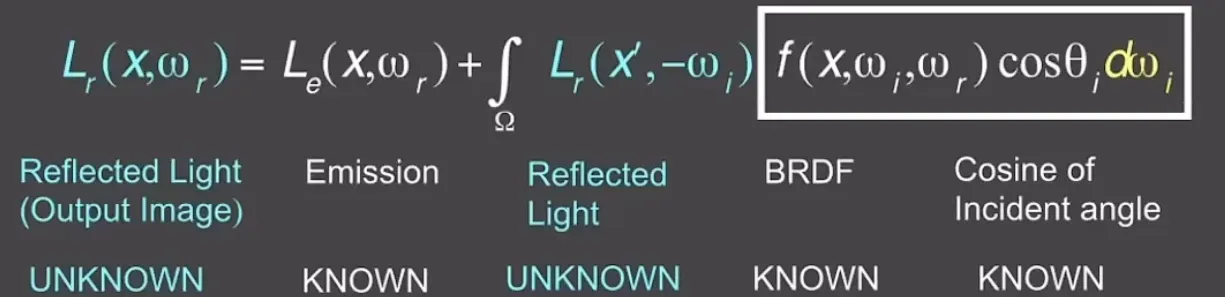
由图可知,想要解出反射光只有入射光不可知
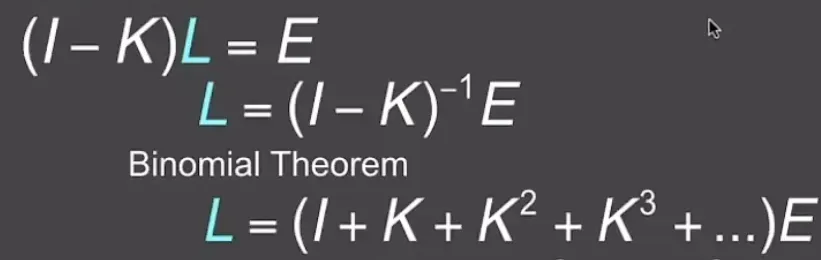
将这个方程简写为
再将这个方程简写,使其变为矩阵形式的 递归定义
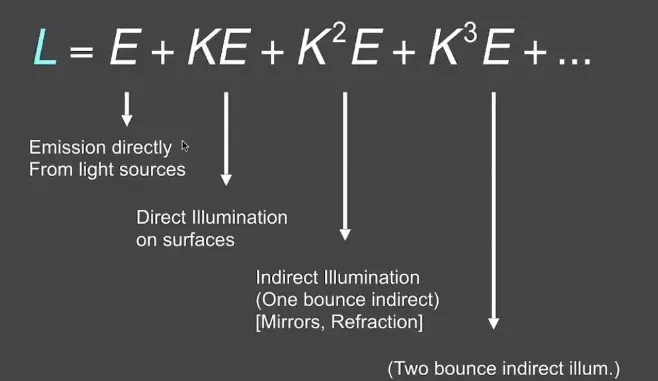
用E和K表示L后,再利用二项式定理展开,最后结果为
路径追踪
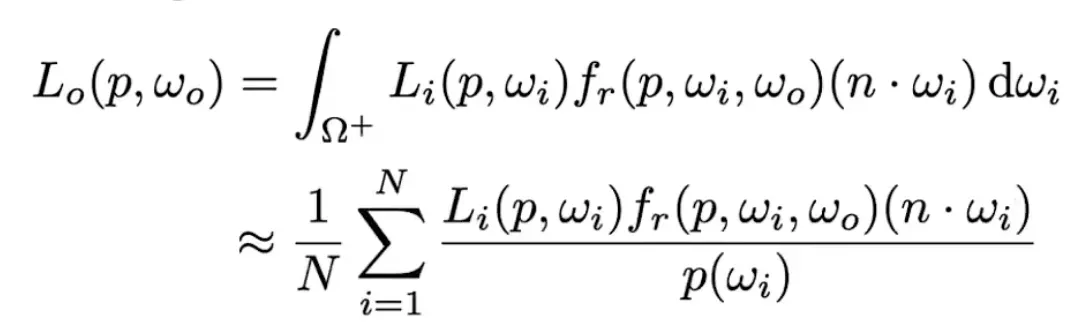
蒙特卡洛积分

p(Xi)为随机变量Xi的概率密度分布函数,估计值与理论值之间的误差可以通过增加样本数来减小。
将蒙特卡洛积分应用到渲染方程
待解决的问题
弹射光线迅速增多
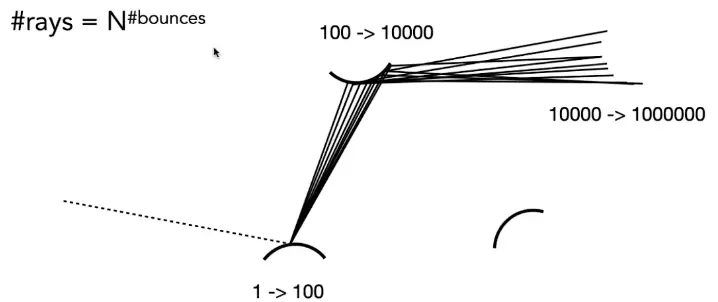
我们在计算光线的漫反射时,有多个点都会有反射光线到达,再次反射时,所需计算的光线会指数级别增加。
所以我们假设每条N = 1,只有一条路径,以此来做蒙特卡洛积分,这就叫路径追踪
但是只有一条路径产生的画面会有很大的噪声,所以我们在单个像素上追踪足够多的路径来改善画面
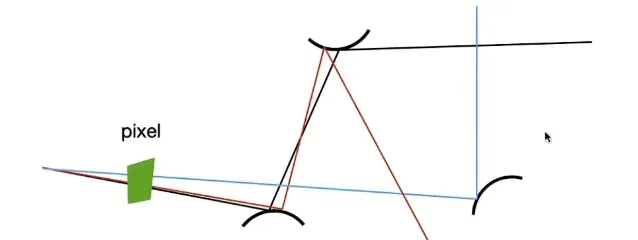
采样效率不高
如果我们对着色点进行采样,那么可能追踪的路径只有少数才会到达光源,这样对于光源的采样效率会很低
所以我们直接对光源进行采样,但是渲染方程是对于着色点的,是对于dw的积分
因此我们需要将渲染方程改写为dA的积分,也就是要求出dw和dA的转换关系
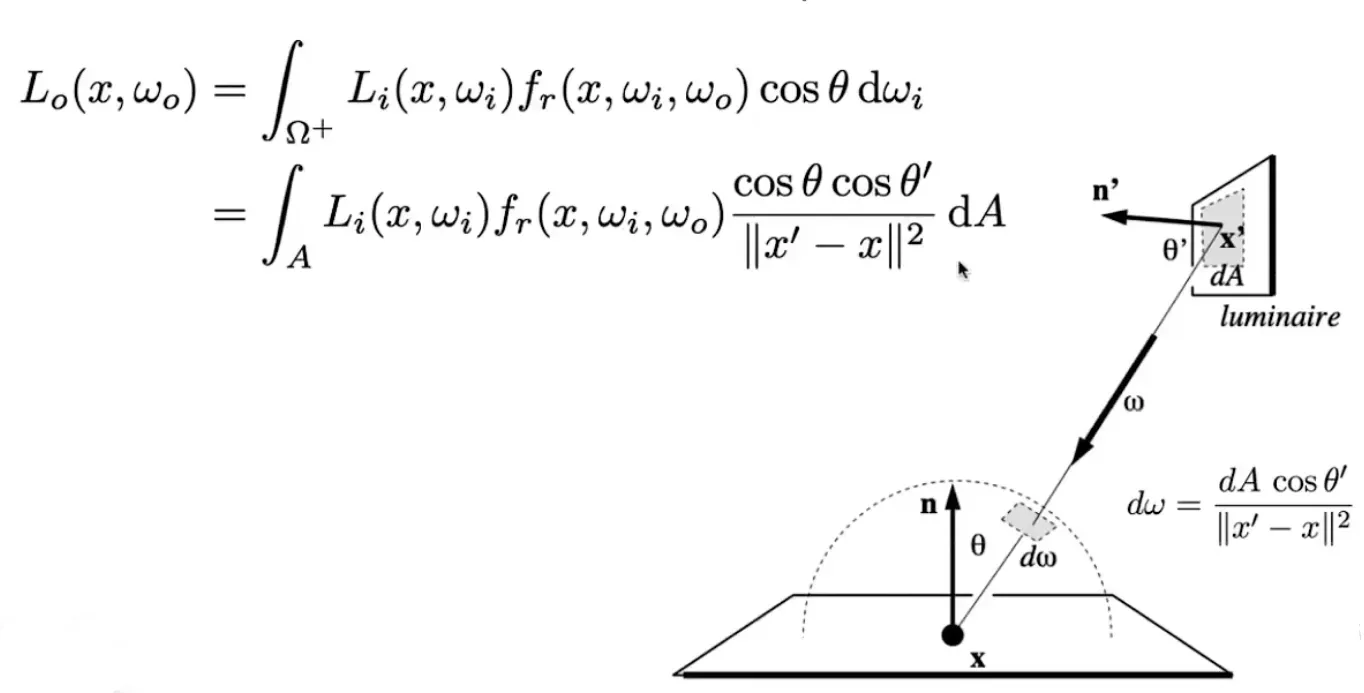
dw为dA在该方向上的投影面积除以他们之间距离的平方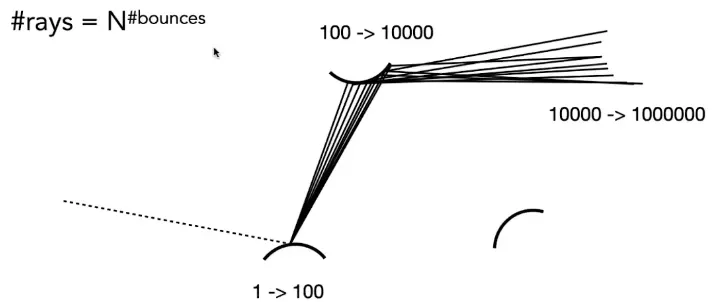
因此考虑两方面的辐射,光源和其他的间接光照。间接光照采用”俄罗斯轮盘赌 “
如何判断光照是否被遮挡
发射一条从x到x’的光线,检测是否被遮挡
文章出处登录后可见!