一、数字图像概念
1.数字图像的颜色
数字图像:用二维阵列表示的影像,阵列元素表示亮度值或灰度值。
RGB是指的彩色图像。
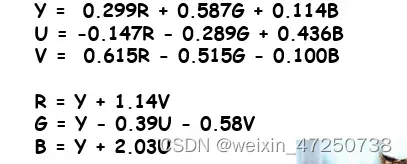
YUV是复合颜色视频标准,RGB经过矩阵变换得到亮度信号Y,再取Y,(R-Y),(B-Y)。
2.图像的存储
3.图像的边缘
(1)空间曲面的不连续点
(2)不同材料或不同颜色
(3)物体与背景的分界线
(4)阴影引起的边缘
4.数字图像处理的基本流程
(1)图像采集
(2)图像增强
(3)图像复原
(4)分割
(5)表示&描述
(6)对象识别
(7)图像压缩
5.图像预处理
为什么要对图像进行预处理?
一般情况下,图像是通过成像系统获得,而成像系统本身电子干扰和外界环境产生的随机干扰,使图像含有噪声。
成像系统所处的照明或其他环境,使得图像灰度的分辨率不高,需要对分辨率进行修正。
图像预处理的功能是什么?
只是将图像中感兴趣的特征有选择的突出,衰减其不需要的特征。
6.直方图修正
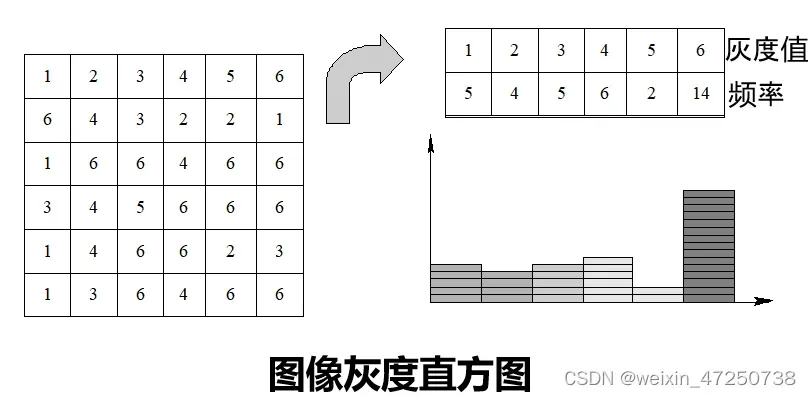
直方图概念
将图像中的像素亮度看成一个随机变量,其分布情况表现为灰度直方图。,反映了每种灰度出现的频率,是图像最基本的统计特征。
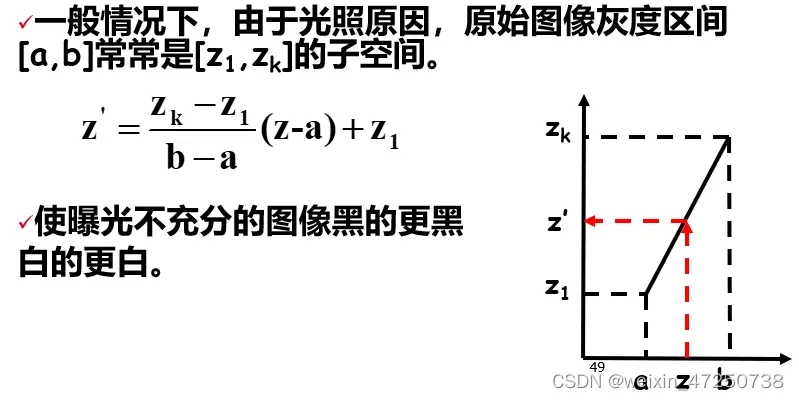
问题:图像的灰度值非均匀分布,其中有很多图像的灰度值集中在一个小的区间内,导致图像对比度降低。
解决:直方图均衡化可以通过重新均匀分布各个灰度值来增强图像的对比度。
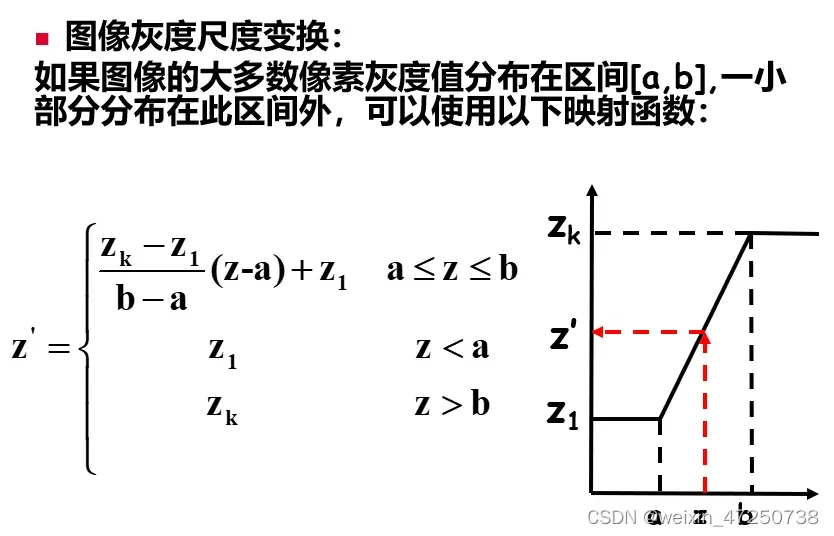
把图像在区间[a,b]的像素点映射到[z1,zk]的区间内。
二、线性滤波器
1.使用线性滤波器的原因
椒盐噪声:含有随机出现的黑白亮度值。
高斯噪声:含有亮度服从高斯或正态分布的噪声。高斯噪声是很多传感器噪声的模型,如摄像机的电子干扰噪声。
常用的线性滤波器:
均值滤波器
高斯平滑滤波器
2.均值滤波器
最简单的均值滤波器是局部均值运算,即每一个像素只用其局部领域内所有值的平均值来置换:

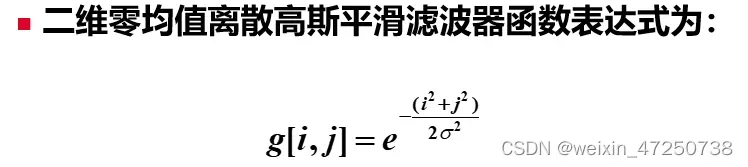
2.高斯平滑滤波
高斯平滑滤波器是一类根据高斯函数的形状来选择权值的线性滤波器。
高斯平滑滤波器对去除服从正太分布的噪声是很有效的。
三、非线性滤波器
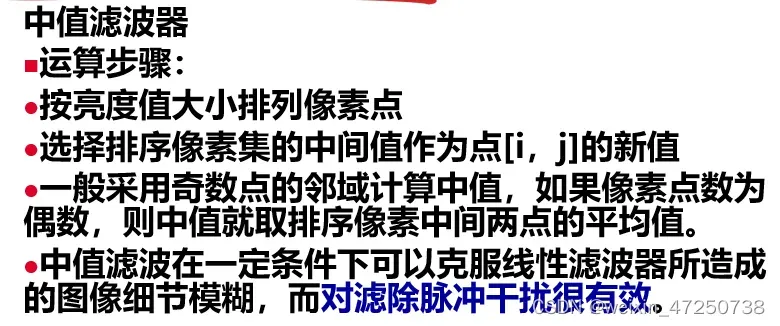
1.中值滤波器
均值滤波和高斯滤波运算主要问题是有可能模糊图像中尖锐不连续的部分。
中值滤波器的基本思想使用像素点邻域灰度值的中值来代替该像素点的灰度值,它可以去除脉冲噪声、椒盐噪声同时保留图像边缘细节。
中值滤波器的步骤:
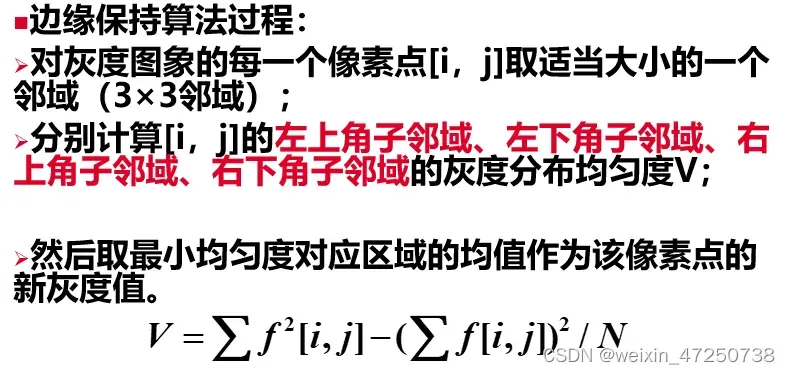
2.边缘保持滤波器
均值滤波在去除噪声的同时会使边缘模糊
中值滤波在去除噪声的同时会使图像的线性细节被抹除。
边缘保持滤波综合考虑均值滤波和中值滤波,
滤波器在去除噪声的同时,又不至于使图像边缘十分模糊。
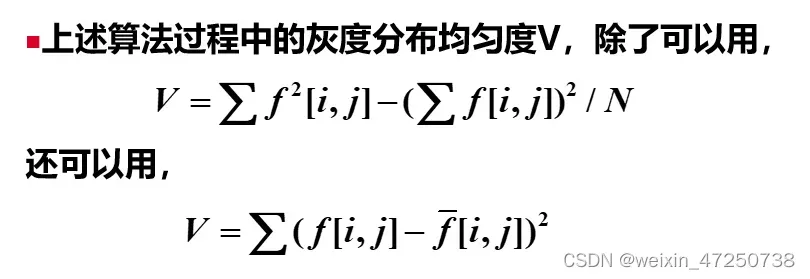
边缘保持滤波计算过程:
文章出处登录后可见!