LVI-SAM是TixiaoShan大佬在他之前LIO-SAM工作基础上耦合了视觉惯性里程计,算法包含雷达惯性里程计模块及视觉惯性里程计模块,其中视觉惯性里程计采用VINS-MONO,其实整体设计是为了在雷达退化的场景中,使用视觉里程计定位结果代替雷达退化方向位姿,同时利用雷达惯性里程计结果初始化整个视觉惯性里程计系统,并使用Lidar点云深度信息融合图像数据,雷达惯性里程计中同样使用视觉词袋回环检测结果参与因子图优化.
之前写过一篇有关LIO-SAM安装并适配自己传感器的文章:LIO-SAM:配置环境、安装测试、适配自己采集数据集,后续因为一直没有使用到视觉传感器,因此一直没有调试LVI-SAM相关算法,现在想要测试一下融合视觉传感器相关算法,因此把自己调试的一些问题做一个记录,也希望其中的某些点能够帮到大家.
其实有关LVI-SAM安装配置,网上也已经有很多大佬进行了相应的阐述,因此在这里不做算法原理记录了,仅仅记录一下自己调试适配自己数据过程中,有哪些需要注意的点,然后如何快速适配自己的数据,我也是菜鸟一个,文章中如果有出现理解并不正确的地方,还希望大家批评指正.
Paper: https://github.com/TixiaoShan/LVI-SAM/blob/master/doc/paper.pdf
Code : https://github.com/TixiaoShan/LVI-SAM
1. 电脑配置
Ubuntu 18.04 + ROS Melodic + GTSAM 4.0.2 + CERES 1.14.0
2. 环境配置
2.1. ROS Melodic安装
2.2. GTSAM 4.0.2安装
GTSAM官网:https://github.com/borglab/gtsam
git clone https://github.com/borglab/gtsam.git
mkdir build && cd build
cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF ..
sudo make install -j4
2.3. Ceres 1.14.0安装
Ceres官网:https://github.com/ceres-solver/ceres-solver
git clone https://github.com/ceres-solver/ceres-solver.git
mkdir build && cd build
cmake ..
sudo make install -j4
2.4. 创建工作空间并编译
mkdir ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/TixiaoShan/LVI-SAM.git
cd ..
catkin_make -j4
3. 运行示例数据
示例数据Google网盘链接:https://drive.google.com/drive/folders/1q2NZnsgNmezFemoxhHnrDnp1JV_bqrgV?usp=sharing
为了方便下载,已转移其中部分数据至百度网盘,有需要可以使用下方链接获取:
链接: https://pan.baidu.com/s/1xKkva1sHI4amKswnWihKqQ 提取码: 7bem
启动程序运行示例数据:
# 启动LVI-SAM建图节点
roslaunch lvi_sam run.launch
# 播放示例数据
rosbag play handheld.bag
4. 适配自己传感器数据
由于LVI-SAM包含LIO及VIO两个模块,适配自己传感器数据时需要两个模块都进行适配,即保证单独的一个模块针对自己传感器数据都是可稳定运行的, 如果前期做过视觉SLAM的朋友可能更容易调试一些, 调试过程总体可以分为三步:
4.1. 调试LIO模块
调试LIO模块,此过程可以在launch文件中注释掉VIO模块节点,仅使用LIO运行数据,确保LIO模块是能够稳定运行的,LVI-SAM系统的LIO模块是在LIO-SAM基础上稍作改动,代码整体逻辑与LIO-SAM基本一致,同样需要雷达数据提供‘ring‘及’time’属性,调试过程可以参考我的另一篇文章:LIO-SAM:配置环境、安装测试、适配自己采集数据集,这里不再赘述;
4.2. 调试VIO模块
LVI-SAM系统是将VINS-MONO作为一个单独的里程计模块运行的, 可以融合LIO模块信息进行VIO模块系统初始化以及获取Lidar局部点云地图为图像提供深度信息, 也可以独立初始化运行(但是对于平面运动无人车初始化较为困难); 因此如果觉得联合调试较为困难,则可以当做直接调试VINS-MONO工程即可,作者留好了相应的接口配置,只需要在config/params_camera.yaml文件中修改以下参数即可:
# Lidar Params
use_lidar: 1 # whether use depth info from lidar or not
lidar_skip: 3 # skip this amount of scans
align_camera_lidar_estimation: 1 # align camera and lidar estimation for visualization
"use_lidar"参数为 1 则表示使用LIO模块结果初始化VIO系统并且进行图像深度估计,反之则不使用Lidar点云数据及LIO数据.
"align_camera_lidar_estimation"参数则是为了便于同步雷达惯性里程计与视觉惯性里程计显示用的.
4.2.1 配置相机内参
调试视觉惯性里程计模块最关键的是要做好相机去畸变,因此第一步需要做的便是设置相机内参,调试前需要明确设备的相机模型及畸变模型(针孔 or 鱼眼 or 其它),然后根据具体设备使用的模型进行相机内参标定, 标定可以使用Kalibr功能包(Kalibr可以标定相机内参、多相机标定及标定Camera与IMU外参,相关资料网上很多,这里不做赘述),标定完成后直接在config/params_camera.yaml文件中修改为自己的相机内参即可,具体要修改的相机内部参数部分如下:
1. 鱼眼相机模型(以lvi-sam示例数据为例)
model_type: MEI
camera_name: camera
image_width: 720
image_height: 540
mirror_parameters:
xi: 1.9926618269451453
distortion_parameters:
k1: -0.0399258932468764
k2: 0.15160828121223818
p1: 0.00017756967825777937
p2: -0.0011531239076798612
projection_parameters:
gamma1: 669.8940458885896
gamma2: 669.1450614220616
u0: 377.9459252967363
v0: 279.63655686698144
2. 针孔相机模型(以urban-nav数据集为例)
model_type: PINHOLE
camera_name: camera
image_width: 1920
image_height: 1200
distortion_parameters:
k1: -0.109203
k2: 0.063536
p1: -0.003427
p2: -0.000629
projection_parameters:
fx: 1086.160899
fy: 1090.242963
cx: 940.067502
cy: 586.740077
4.2.2 配置VIO模块外参
相机内参设置完成后,接下来则需要根据真实设备,调整VIO模块中各个传感器之间外参,要更改的外参主要包括lidar-camera、camera-imu、lidar-imu外参,下面将会对lvi-sam涉及传感器外参部分进行一些解释,以便修改适配个人传感器:
- Camera-IMU外参修改:在Vins-Mono原始代码中已经将外参设置修改放在了yaml文件中,因此可以直接在config/params_camera.yaml文件中更改"extrinsicRotation"以及"extrinsicTranslation"参数:
# 以下为IMU To Camera外参
#Rotation from camera frame to imu frame, imu^R_cam
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0, 0, -1,
-1, 0, 0,
0, 1, 0]
#Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.006422381632411965, 0.019939800449065116, 0.03364235163589248]
接下来要更改Lidar-Camera以及Lidar-IMU外参,这两部分外参设置需要修改代码,因为作者根据自己的设备将外参在代码中固定了, 如果不在程序中修改为自己设备的实际外参,则很容易跑飞.
- Lidar-IMU外参修改:作者直接在代码中固定了lidar-imu外参(由于作者设备各传感器安装紧凑,因此忽略了平移量),具体代码实现在’visual_estimator/visualization.cpp’中,代码如下, 如果要设置lidar-imu外参,则需要更改此处代码:
tf::Quaternion q_odom_cam(Q.x(), Q.y(), Q.z(), Q.w());
// 这里其实是利用lidar-imu外参,获取lidar坐标系在VIO系统世界系下坐标
tf::Quaternion q_cam_to_lidar(0, 1, 0, 0); // mark: camera - lidar
tf::Quaternion q_odom_ros = q_odom_cam * q_cam_to_lidar;
tf::quaternionTFToMsg(q_odom_ros, odometry.pose.pose.orientation);
// 用于给LIO系统做位姿预测
pub_latest_odometry_ros.publish(odometry);
// TF of camera in vins_world in ROS format (change rotation), used for depth registration
// 这里从注释可以看出, 是发送的camera在VIO系统世界系下坐标,只给到特征提取模块进行深度关联
// 但是这里直接将lidar位姿作为camera位姿发布出去了,是由于后面深度关联中,要利用camera视场角做点云筛选
// 而在ros 标准坐标系定义都是以x: front y: left z: up为准,为了便于后续计算,这里直接做了将camera坐标系转换为ros标准系的隐式变换
// 而在作者设备中,lidar坐标系与ros标准系一致且可以忽略camera与lidar之间的平移量,因此camera位姿可以直接使用lidar位姿代替
// 如果这里camera与lidar安装偏差较大(旋转和平移),则此处需要进行较大改动,需要明确camera标准ros系与lidar坐标系外参
// 这里的一些关系可以由后面特征提取模块作者给出的定义及 lidar_to_cam_ty等外参分析获得.
tf::Transform t_w_body = tf::Transform(q_odom_ros, tf::Vector3(P.x(), P.y(), P.z()));
tf::StampedTransform trans_world_vinsbody_ros = tf::StampedTransform(t_w_body, header.stamp, "vins_world", "vins_body_ros");
br.sendTransform(trans_world_vinsbody_ros);
同时在"visual_estimator/initial/initial_alignment.h"中作者也直接在初始构造函数中初始化了Lidar-IMU外参, 如果要设置lidar-imu外参,此处也需要更改:
odometryRegister(ros::NodeHandle n_in):
n(n_in)
{
// lidar-imu外参,主要作用是将LIO系统lidar位姿转换到VIO系统世界系下,并提供给VIO系统进行系统初始化
q_lidar_to_cam = tf::Quaternion(0, 1, 0, 0); // rotate orientation // mark: camera - lidar
// VIO系统世界系与LIO系统世界系外参,固定值即可
q_lidar_to_cam_eigen = Eigen::Quaterniond(0, 0, 0, 1); // rotate position by pi, (w, x, y, z) // mark: camera - lidar
// pub_latest_odometry = n.advertise<nav_msgs::Odometry>("odometry/test", 1000);
}
- Lidar-Camera外参修改:lidar-camera外参修改比较麻烦,作者根据自己的设备情况在代码中做了很多隐式转换,主要体现在VIO系统特征提取部分,并且如果配置参数中选择VIO系统不使用Lidar点云估计图像深度,则此部分外参也无需修改(由于作者设备各传感器安装紧凑,因此忽略了平移量),最直观的一个lidar-camera外参设置则是yaml文件中的一下部分:
# 以下为Camera-Lidar外参,是lidar坐标系与camera的ros标准系之间的外参,可以理解为此外参在lidar-camera外参基础上多做了一步camera坐标系到ros标准系的隐式转换
# lidar to camera ros standard extrinsic
lidar_to_cam_tx: 0.05
lidar_to_cam_ty: -0.07
lidar_to_cam_tz: -0.07
lidar_to_cam_rx: 0.0
lidar_to_cam_ry: 0.0
lidar_to_cam_rz: -0.04
配置完上述部分参数后,理论上可以正常运行自己的数据了.
4.3. LVI-SAM代码修改
这里为了方便快速适配自己搭建传感器设备,修改了一版简单版本,主要特性如下:
- 将传感器外参设置全部放入yaml文件的代码, 包括Lidar-IMU、Lidar-Camera、Camera-IMU及Camera-ROS standard外参,所有外参均可以直接在yaml文件中修改, 并且将代码中隐式转换部分进行拆解,更容易按照自己的设备进行参数配置;
- 考虑相机坐标系与常规坐标系不同情况,可以直接更改yaml文件适配; 考虑lidar坐标系与ros标准系不同时点云过滤不准确问题,更加灵活适配自己传感器;
- 同时源代码中默认Lidar-IMU-Camera均安装在一起, 因此代码中仅使用了旋转参数, 忽略了平移量, 由于个人设备各传感器安装位置距离偏大, 因此代码中也加入了外参平移量;
- 支持Kitti数据集运行;
- 支持Urban-Nav数据集运行;
- 代码且已上传至Github,有需要的朋友可以Star一下.
LVI-SAM-Simple:https://github.com/YJZLuckyBoy/LVI-SAM-Simple (此版本只是简单基于lvi-sam修改, 适配雷达品牌较少)
lviorf链接:https://github.com/YJZLuckyBoy/lviorf (适配更多雷达品牌且更容易适配不同的传感器设备)
- 使用LVI-SAM-Simple适配自己传感器设备时主要注意以下参数修改,'params_lidar.yaml’文件修改比较简单,这里不做分析;主要介绍一下’config/params_camera.yaml‘’文件修改,其实有关相机内参修改直接参考4.2.2节中第一部分,重点外参修改如下:
- cameraToROSStandard外参修改,这个参数表示camera坐标系(通常情况下为x: right y: down z: front)与ros标准系(x: left y: right z: up)之间的变换关系,通常情况下此外参为固定值,如果你的相机坐标系满足x: right y: down z: front,则此参数不需要修改,此参数主要是为了后面过滤相机视场角以外点云及深度关联使用.
# camera to ros standard frame(front-left-up) extrinsic, Theoretically, it is a fixed value
# for lio-sam datasets(front-left-up)
cameraToROSStandard: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [0, -1, 0,
0, 0, -1,
1, 0, 0]
- camera-imu外参配置,此外参直接根据标定结果在’config/params_camera.yaml‘’文件中修改以下参数即可:
#Rotation from camera frame to imu frame, imu^R_cam
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0, 0, -1,
-1, 0, 0,
0, 1, 0]
#Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.006422381632411965, 0.019939800449065116, 0.03364235163589248]
- 最后需要修改lidar-imu参数,这里修改比较简单,直接在’params_lidar.yaml’文件中修改即可:
# Extrinsics (lidar -> IMU)
extrinsicTrans: [0.0, 0.0, 0.0]
extrinsicRot: [-1, 0, 0,
0, 1, 0,
0, 0, -1]
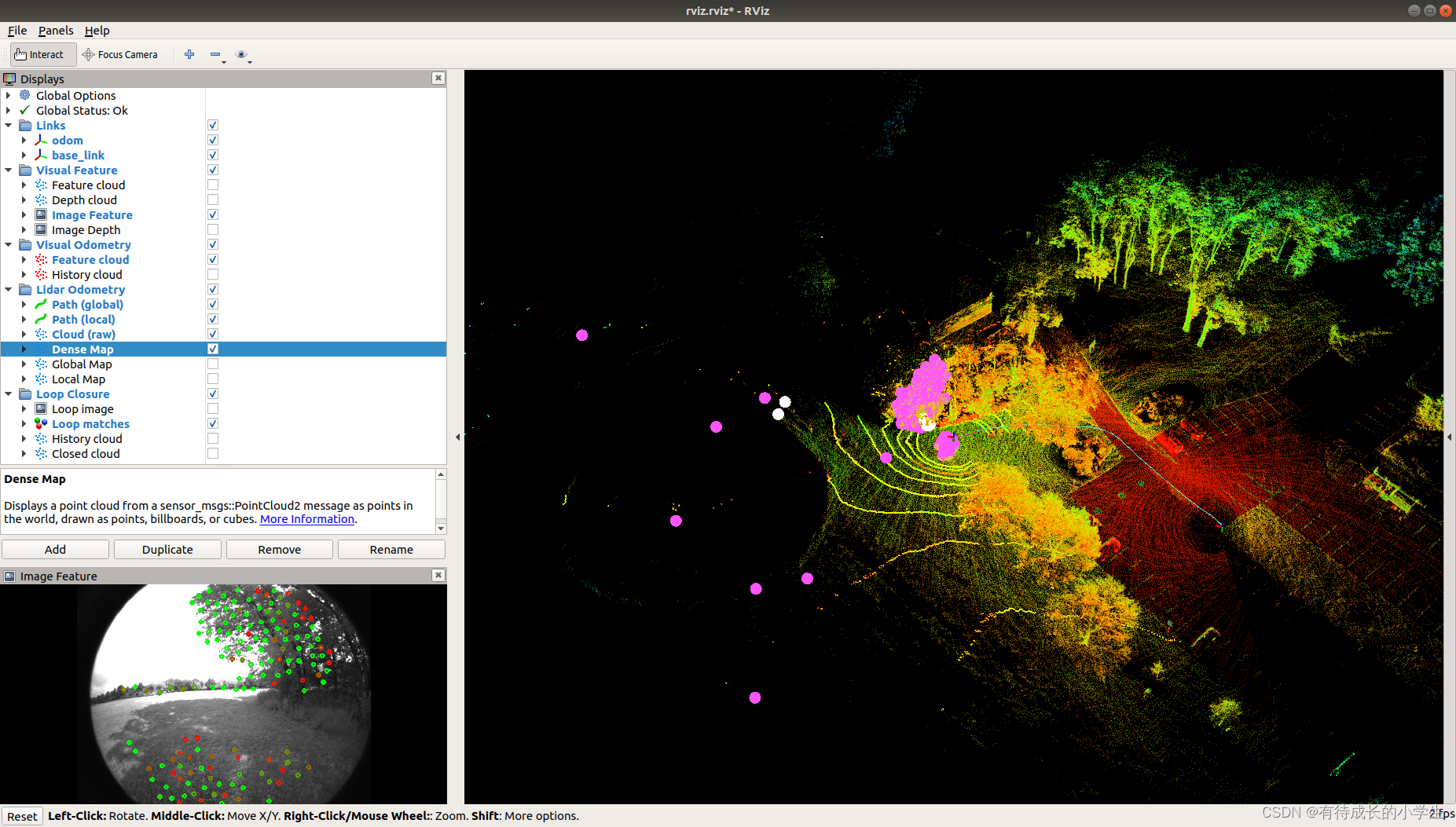
4.3. LVI-SAM-Simple运行结果
4.3.1 适配个人无人车设备
由于调试过程中未进行Lidar与Camera精细化标定,只是给了一个大概的外参数据,因此精度稍差,但是不影响运行结果,以下是分别使用针孔相机及广角相机适配结果,同时两次数据使用了不同品牌雷达进行了适配.
4.3.1.1 针孔相机
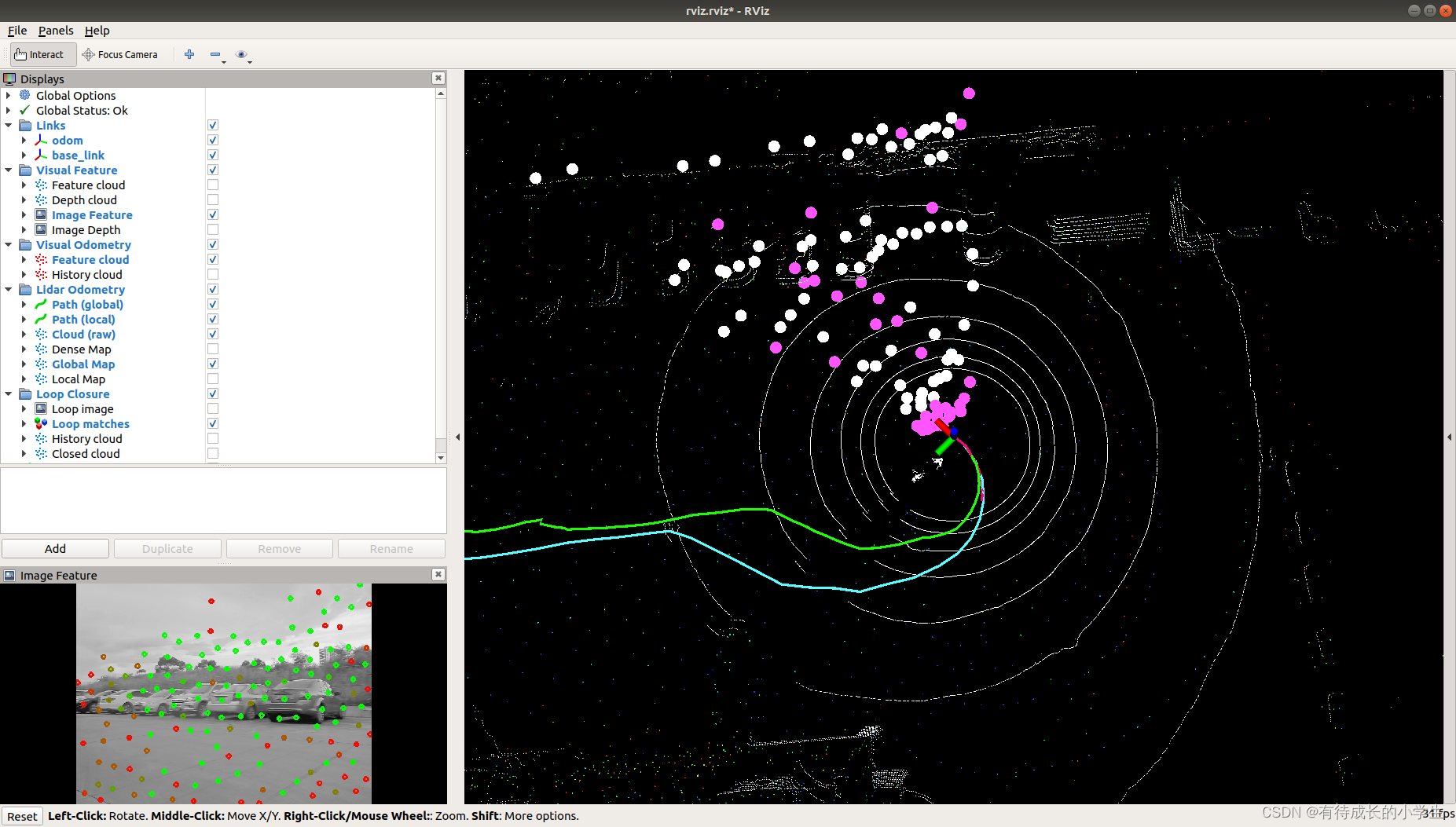
4.3.1.2 广角相机
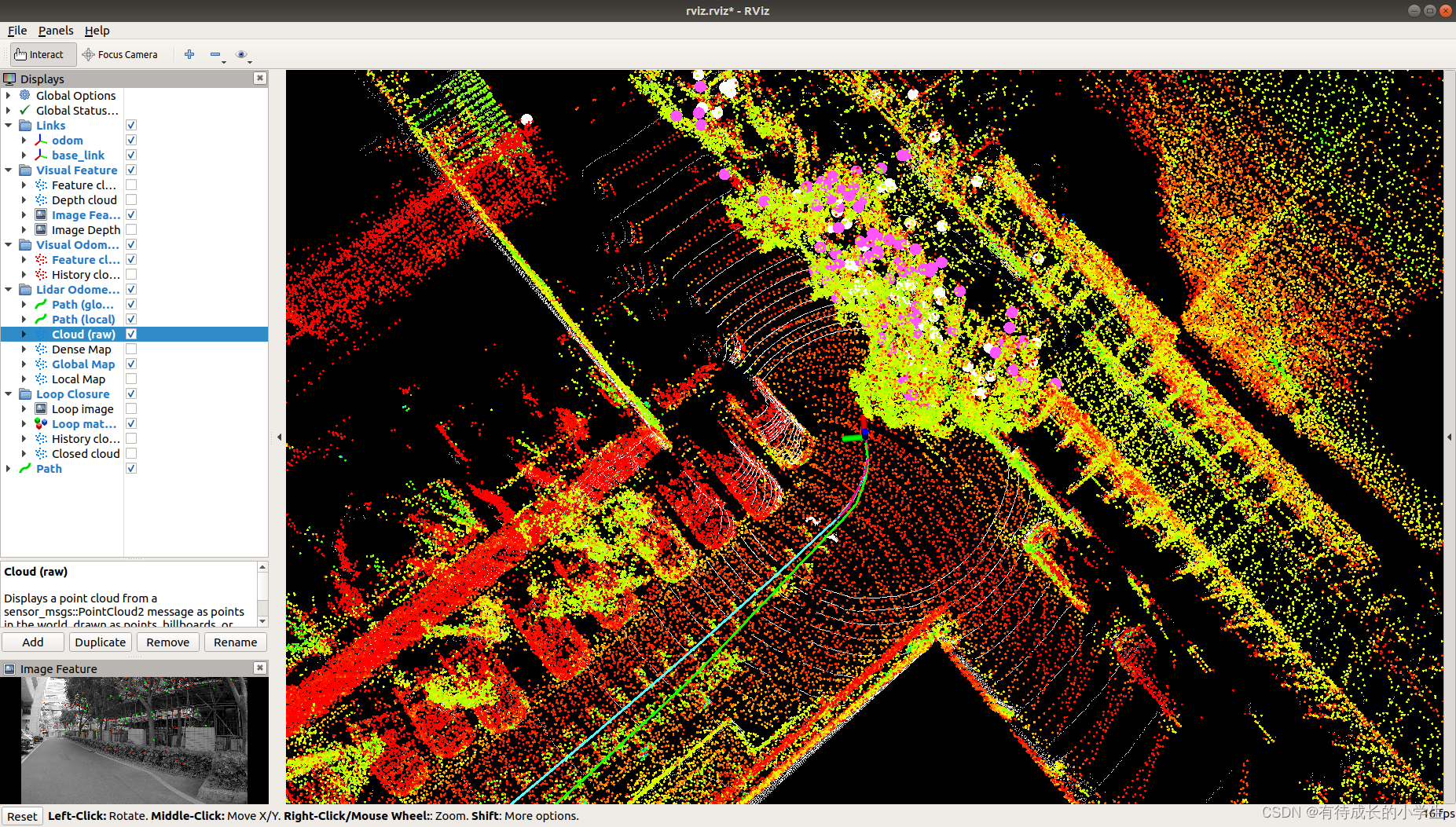
4.3.2 Kitti数据集
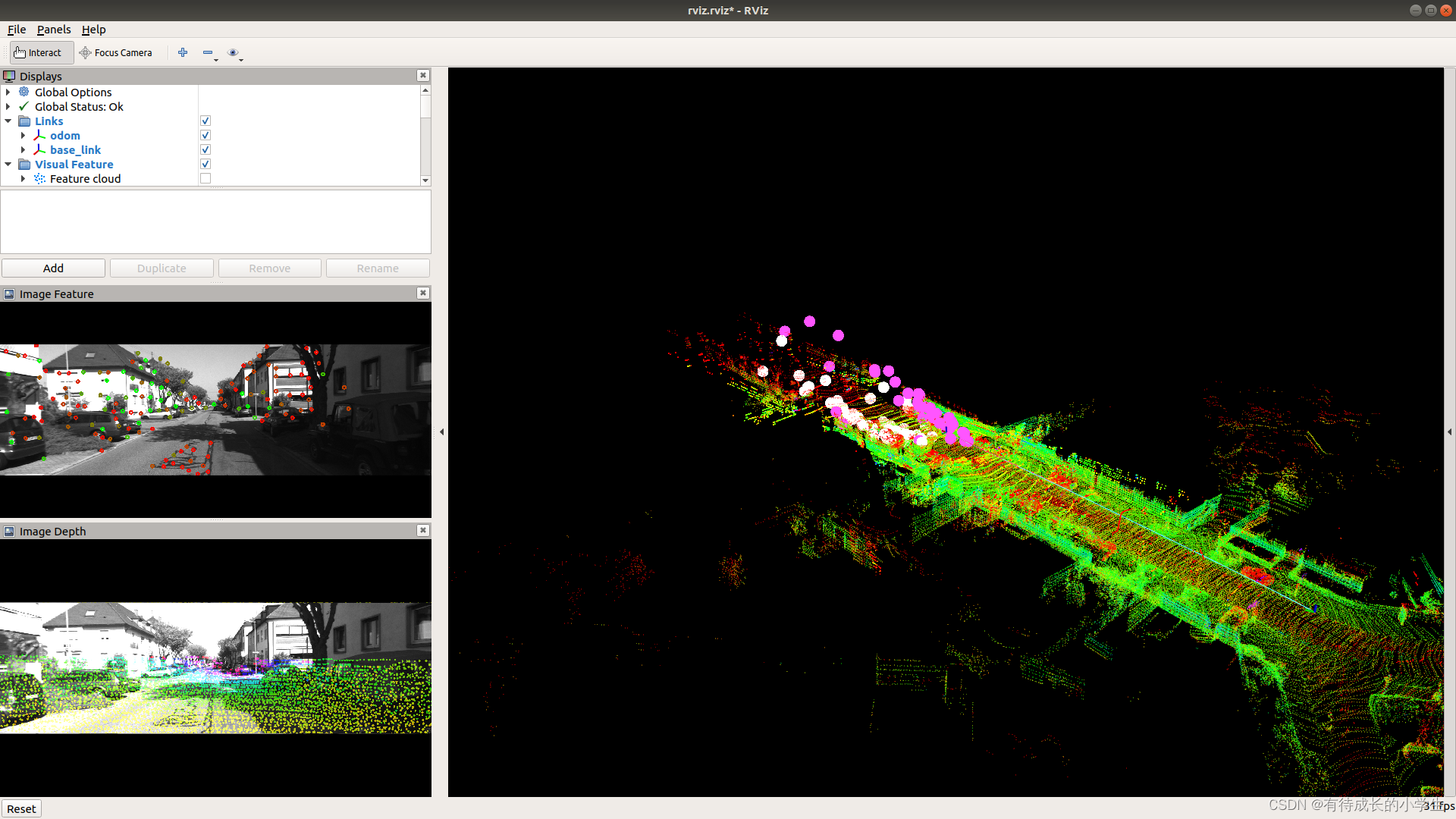
4.3.3 Urban-Nav数据集
4.4. 思考
以上就是自己调试过程中的一些问题记录,希望大家多多指正. 多模态融合SLAM目前是很火的一个方向,LVI-SAM就是一个典型的多模态融合方案,即视觉惯性里程计模块与雷达惯性里程计模块融合,两个模块间既有数据交互融合,但是当某一个模块失效后也不会影响到另一个模块的运行,不得不说LVI-SAM是一个很好的多源融合框架,基于这个框架后续有一些小的思考和疑问,在这里简单说一下,欢迎大家一起讨论.
-
作者提到后续会在预积分模块融合Lidar里程计、视觉里程计、预积分进行联合优化,这将是一个更加紧耦合的方案,如果单一模块出现问题后如何降低相应权重是系统更稳定,很期待大佬的后续工作;
-
现有调试尚未融合GPS数据,GPS参与优化后对系统是否有很大影响,尤其是比较廉价的GPS设备对系统是否有很大影响,还需要进一步测试,实际测试后融合GPS仍可达到很好的效果,但是需要更改前端预测逻辑;
-
LVI-SAM整体融合过程中更多是在Lidar退化时,使用视觉里程计替代退化方向位姿,因此这个思路好像也可以拓展到其他设备中,只要使用的设备在Lidar里程计发生场景退化时,此设备能够保证相对长时间内稳定定位,都可以替换视觉里程计模块. 同样地,把VINS-MONO替换为ORB-SLAM3应该可以达到同样的效果;
-
LVI-SAM中丢弃了使用IMU预积分模块预测值作为前端里程计的初始值,预测值全部来自视觉里程计,但是如果视觉里程计飞掉,则预测值将会使用纯IMU旋转预测,这对于低成本或是6轴IMU来说(LIO-SAM可以很容易适配6轴传感器,支持6轴IMU版本可以使用liorf)是很难得到一个好的预测值的,这里是不是应该优先使用IMU预积分得到的结果,而在检测到Lidar里程计退化时再使用视觉里程计进行预测和补偿,实际测试后发现这种方法仍然是可行的.
文章出处登录后可见!