在美团刚刚发出yolov6,AB大神就带着yolov7来了。。。。。这速度是真快。。
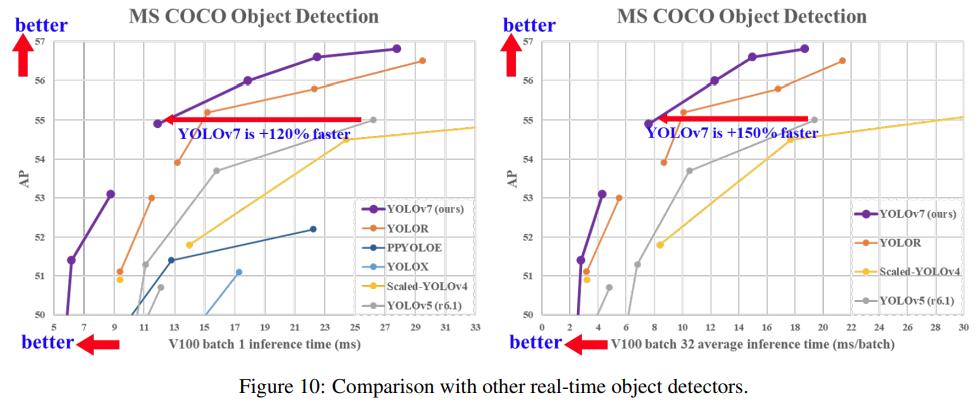
在 5-160 FPS 范围内速度和精度超过所有已知目标检测器。
在 后不到两个星期,提出 YOLOv4 的团队就发布了更新一代的版本。
YOLOv7 的论文被提交到了预印版论文平台 arXiv 上,其三位作者 Chien-Yao Wang、Alexey Bochkovskiy 和 Hong-Yuan Mark Liao 是 YOLOv4 的原班人马。
相对于其他类型的工具,YOLOv7-E6 目标检测器(56 FPS V100,55.9% AP)比基于 transformer 的检测器 SWINL Cascade-Mask R-CNN(9.2 FPS A100,53.9% AP)速度上高出 509%,精度高出 2%,比基于卷积的检测器 ConvNeXt-XL Cascade-Mask R-CNN (8.6 FPS A100, 55.2% AP) 速度高出 551%,精度高出 0.7%。
此外, YOLOv7 的在速度和精度上的表现也优于 YOLOR、YOLOX、Scaled-YOLOv4、YOLOv5、DETR 等多种目标检测器。
YoloV7得github
https://github.com/WongKinYiu/yolov7同时yolov7也出了pose:
https://github.com/WongKinYiu/yolov7/tree/pose今天我们来训练一下yolov7-pose
1、数据集
数据集我们依旧采用作者提供的[Keypoints Labels of MS COCO 2017]
下载完成之后,我们可视化一下:
这是其中的一个txt

前5个参数就是cls cx cy cw ch 后面就是17个点的坐标和2.0(我也不知道是啥,难道是置信度,还没仔细阅读代码),所以一共加载一起一共17*3+5=56个参数。。。
可视化一下图片:




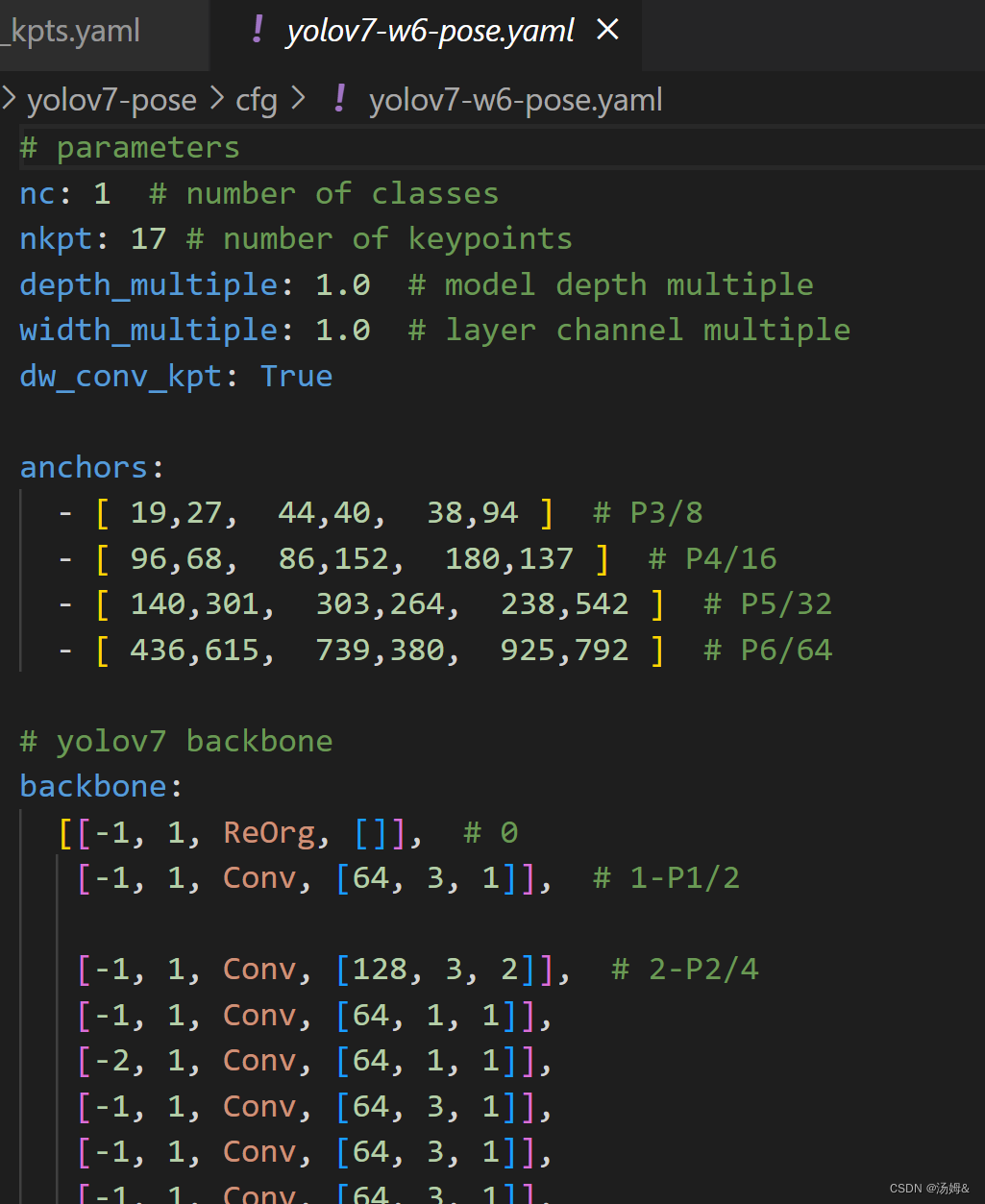
2、配置
大家可以使用其他的yaml文件,自己修改即可。。。。。
使用依旧是yolov7-w6.yaml文件
3、训练
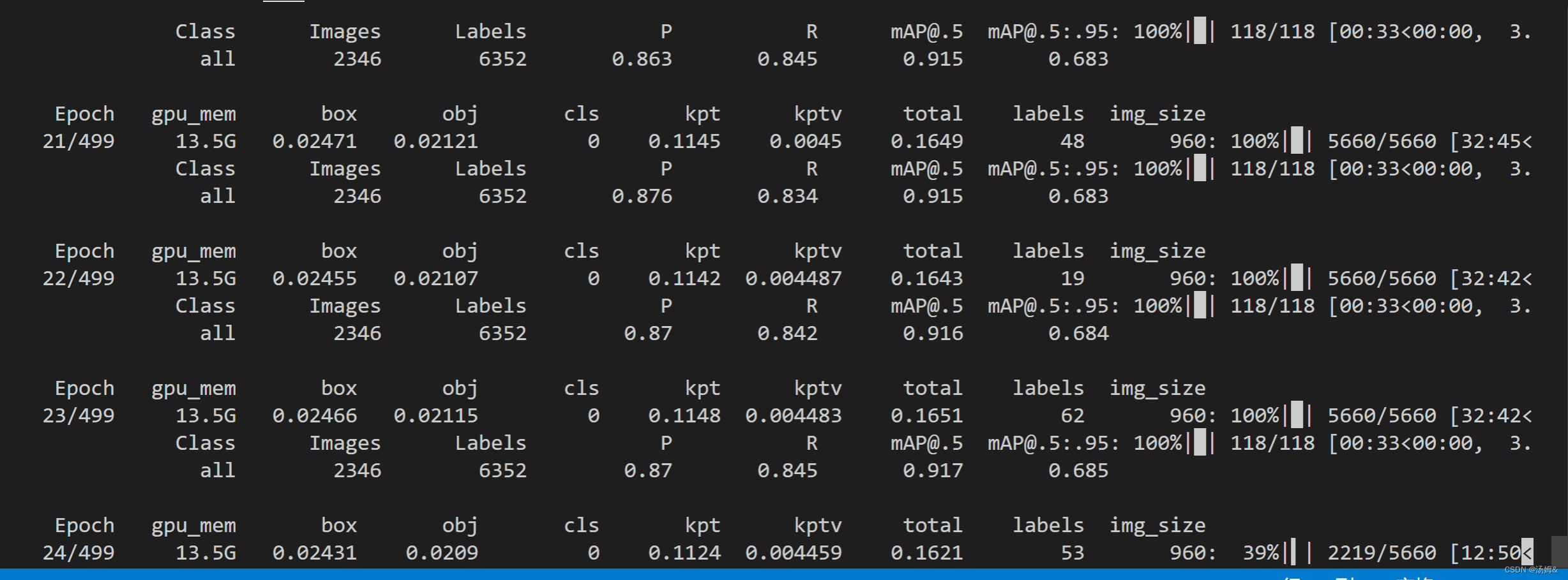

太慢了。。。。。。本着训练了那就开始训练吧,,,,
文章出处登录后可见!