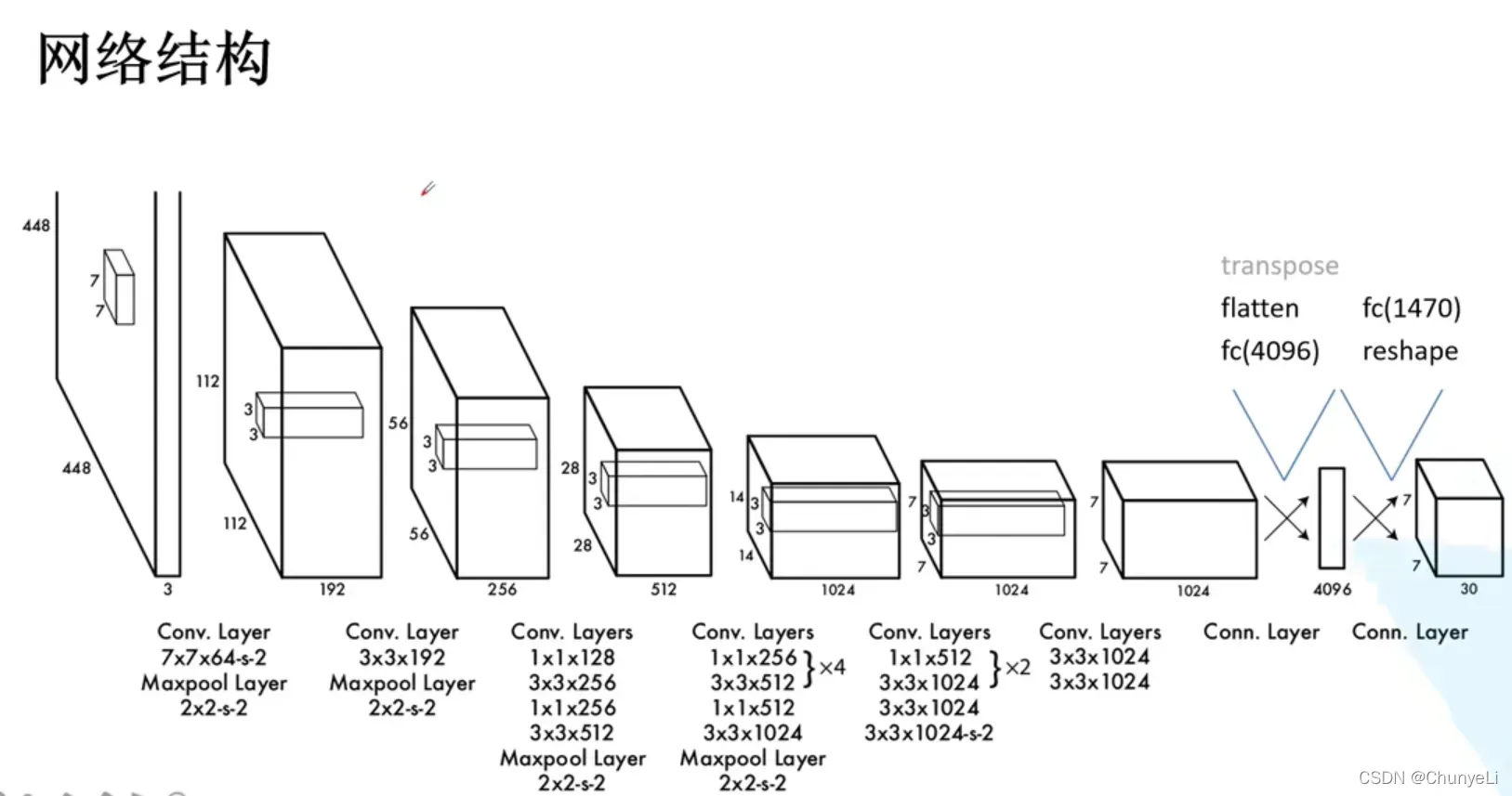
yolo1
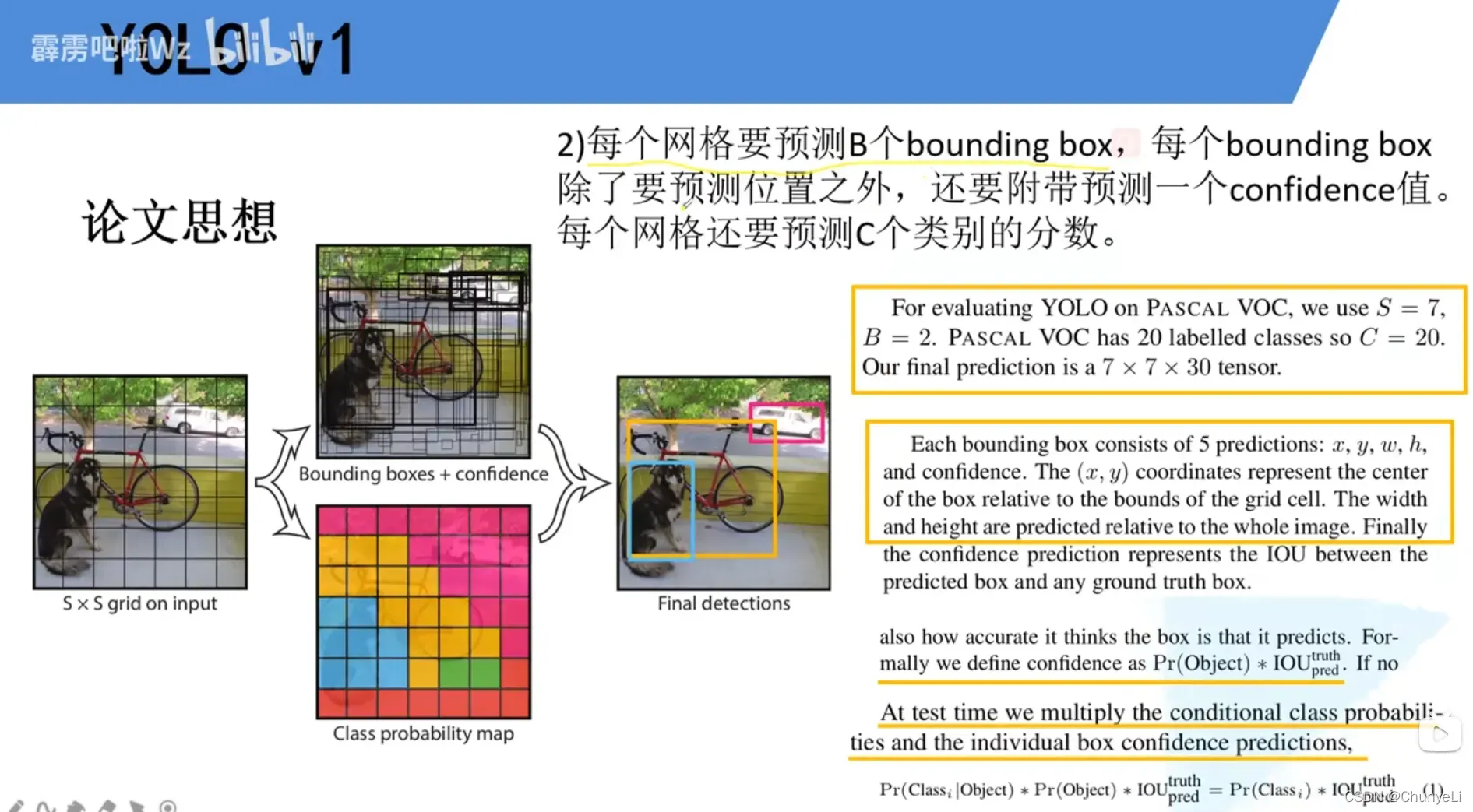
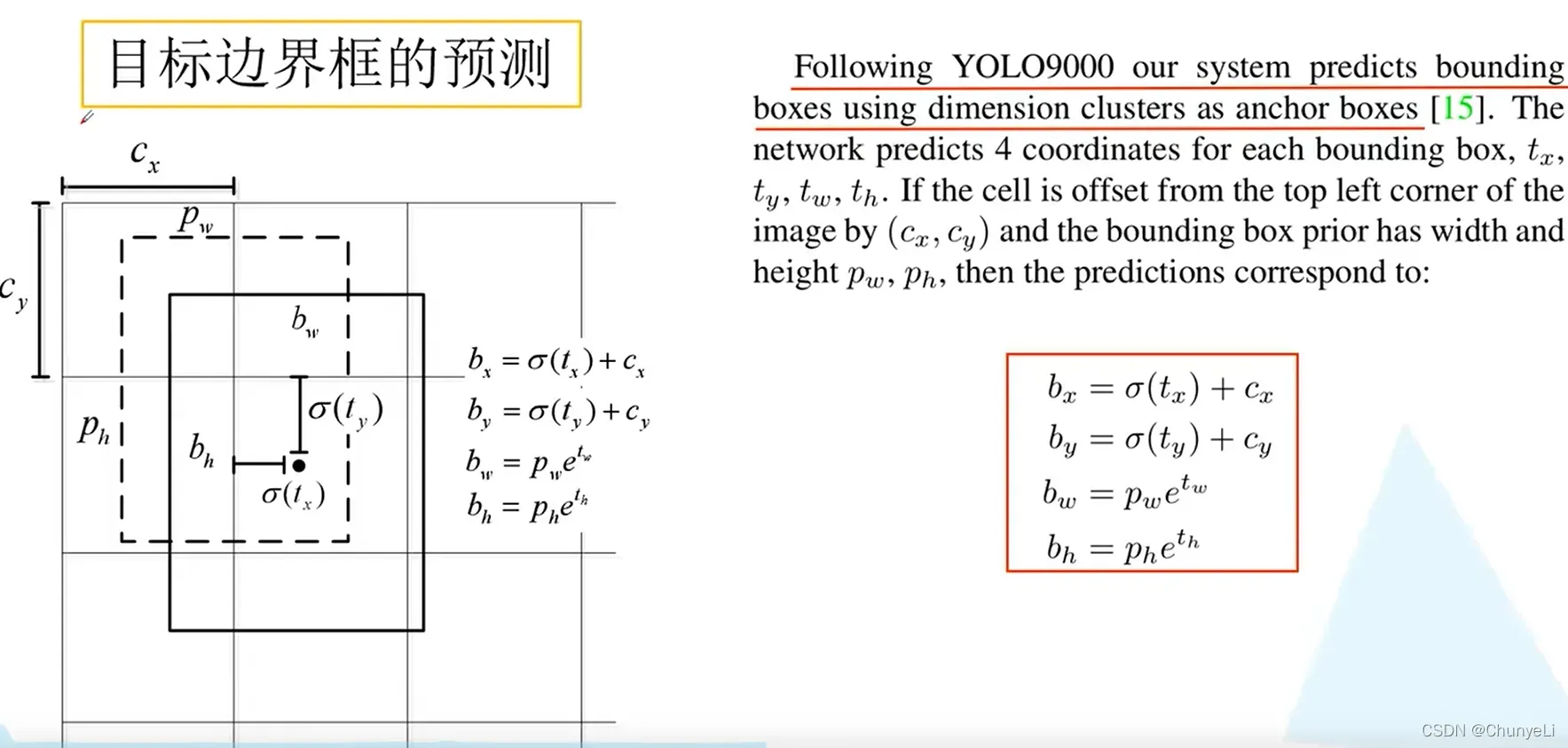
xy是小网格中的,(0,1)
w,h是整个图像中的 ,(0,1)
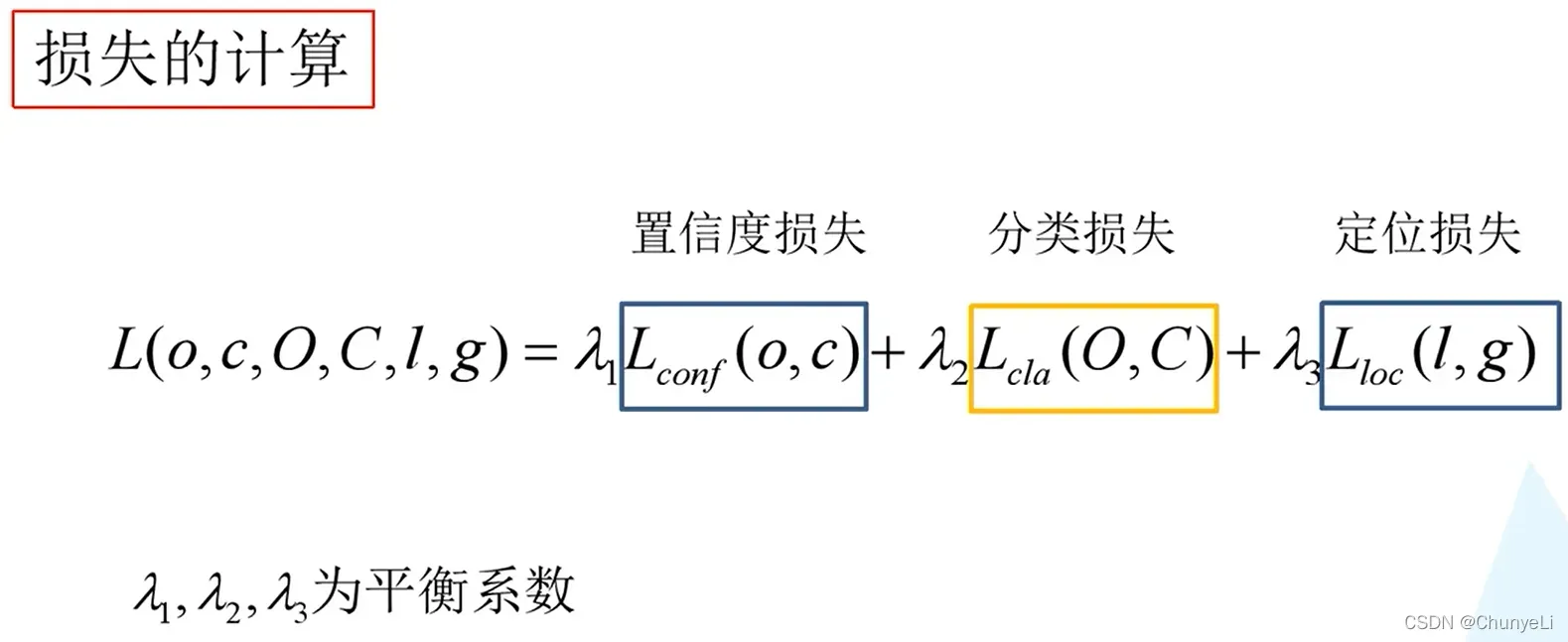
confidence=bounding box是否含有object×预测的与gt之间的iou。
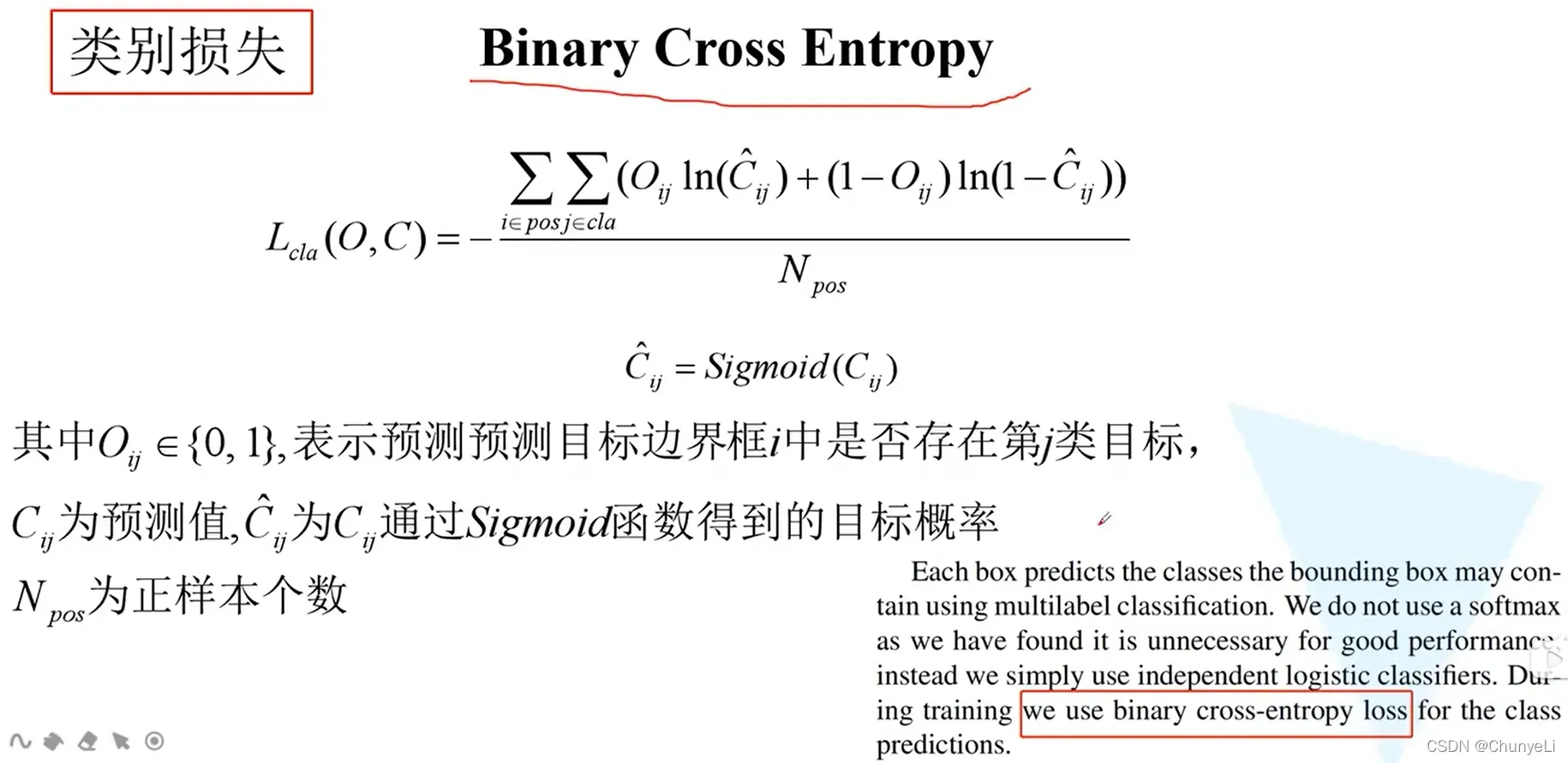
每个目标的概率+预测的目标边界框与真实目标边界框的重合度。
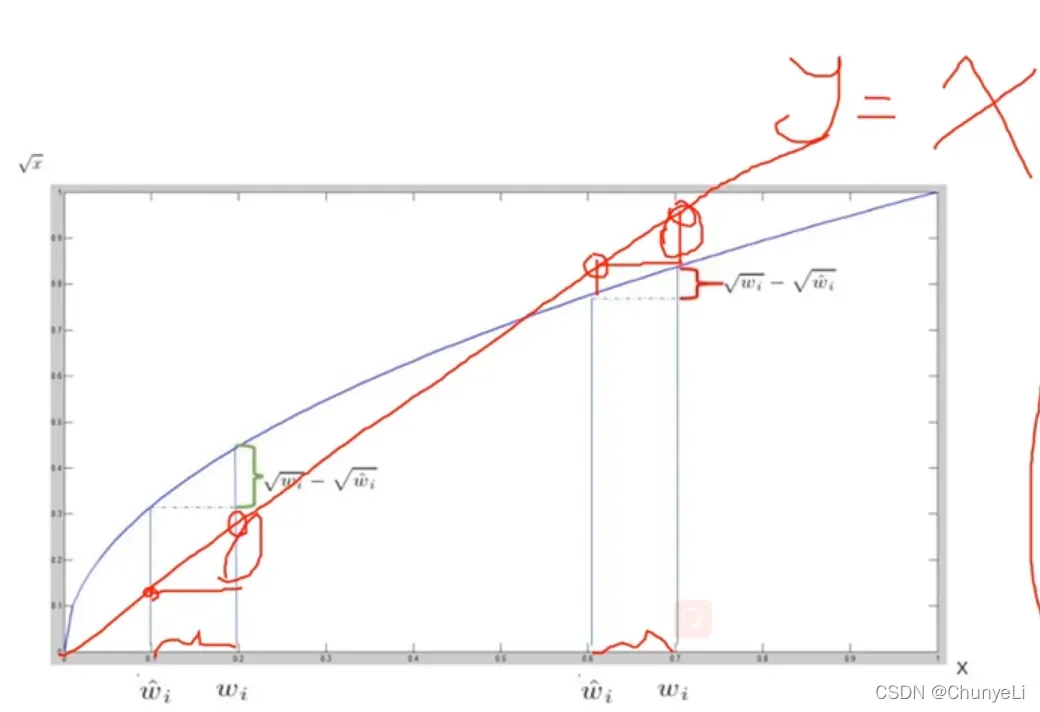
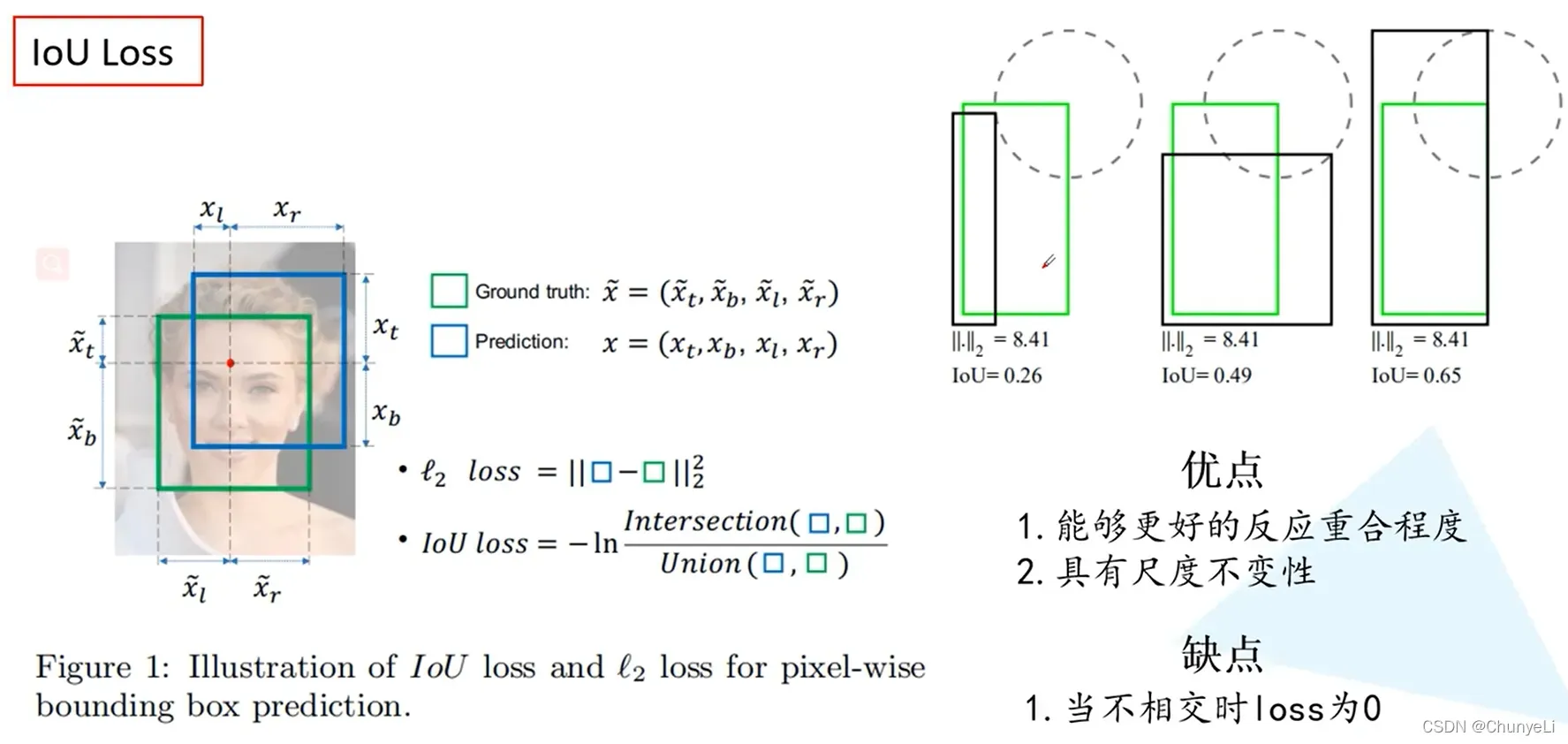
为什么w和h要根号?
假设蓝色是预测的边界框,绿色是真实边界框。
假设目标越小 ,预测的边界框与真实边界框偏移相同的情况下 ,IOU就越大,检测效果越差。
因此,应将小目标的偏差设置得较大。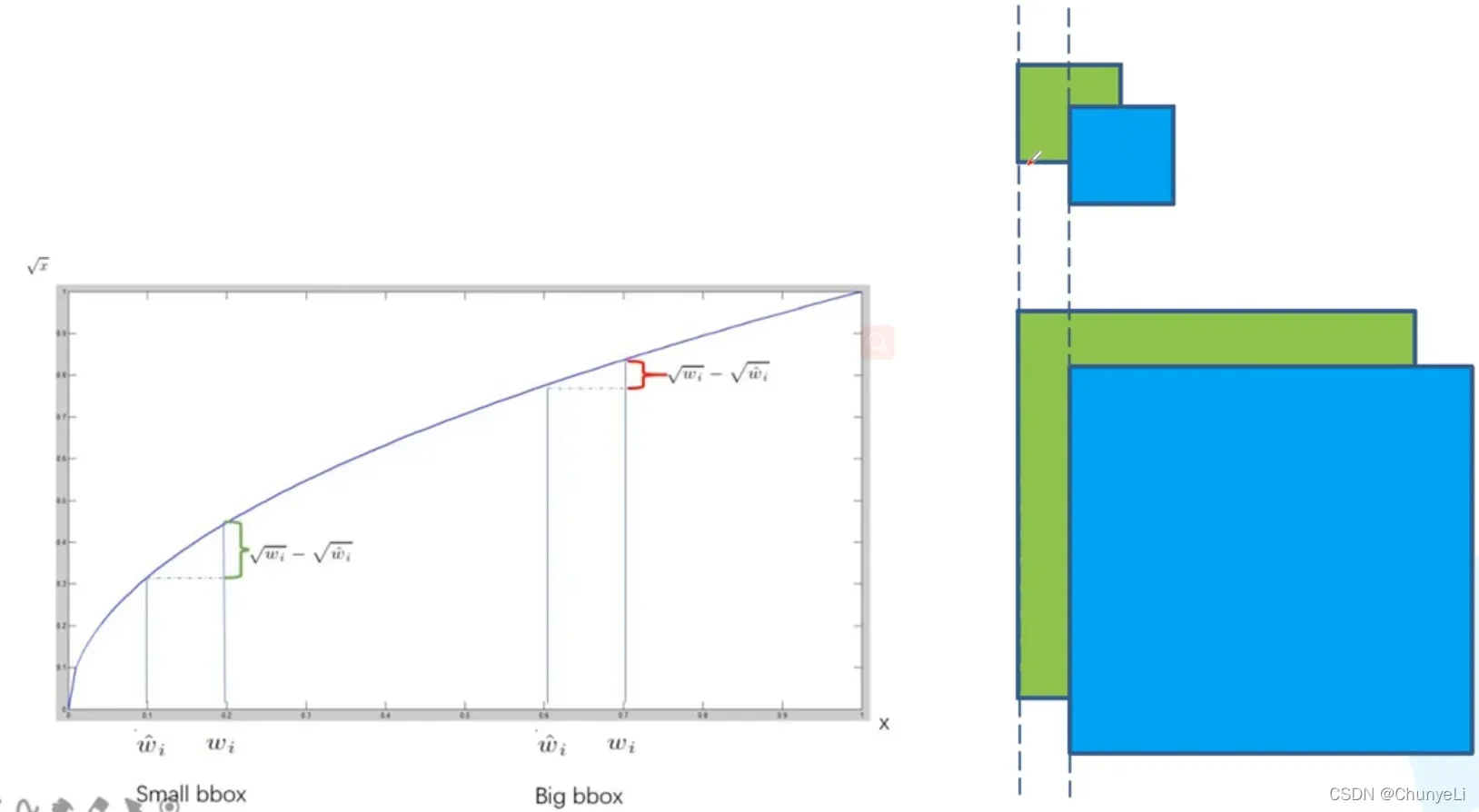
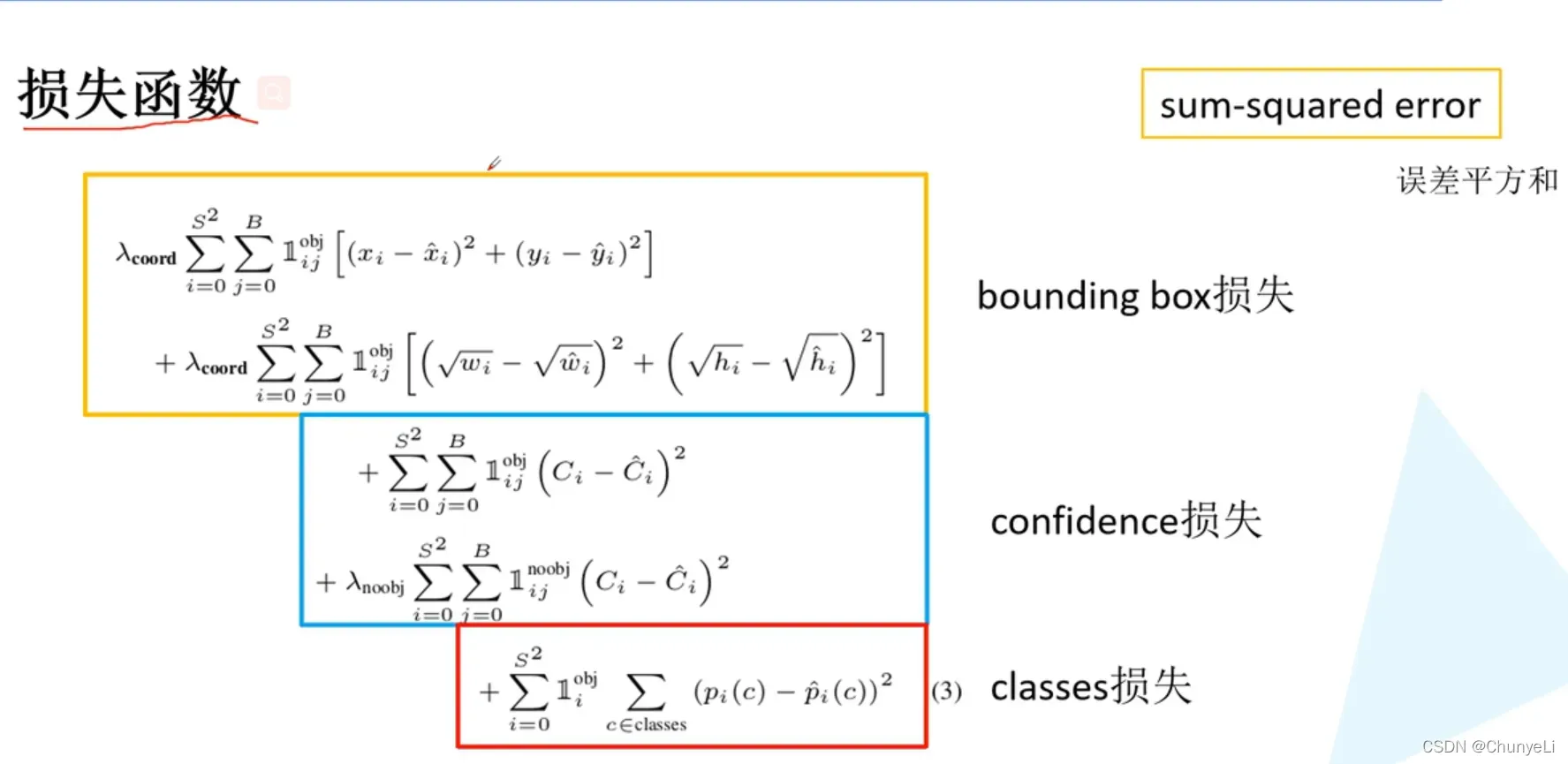
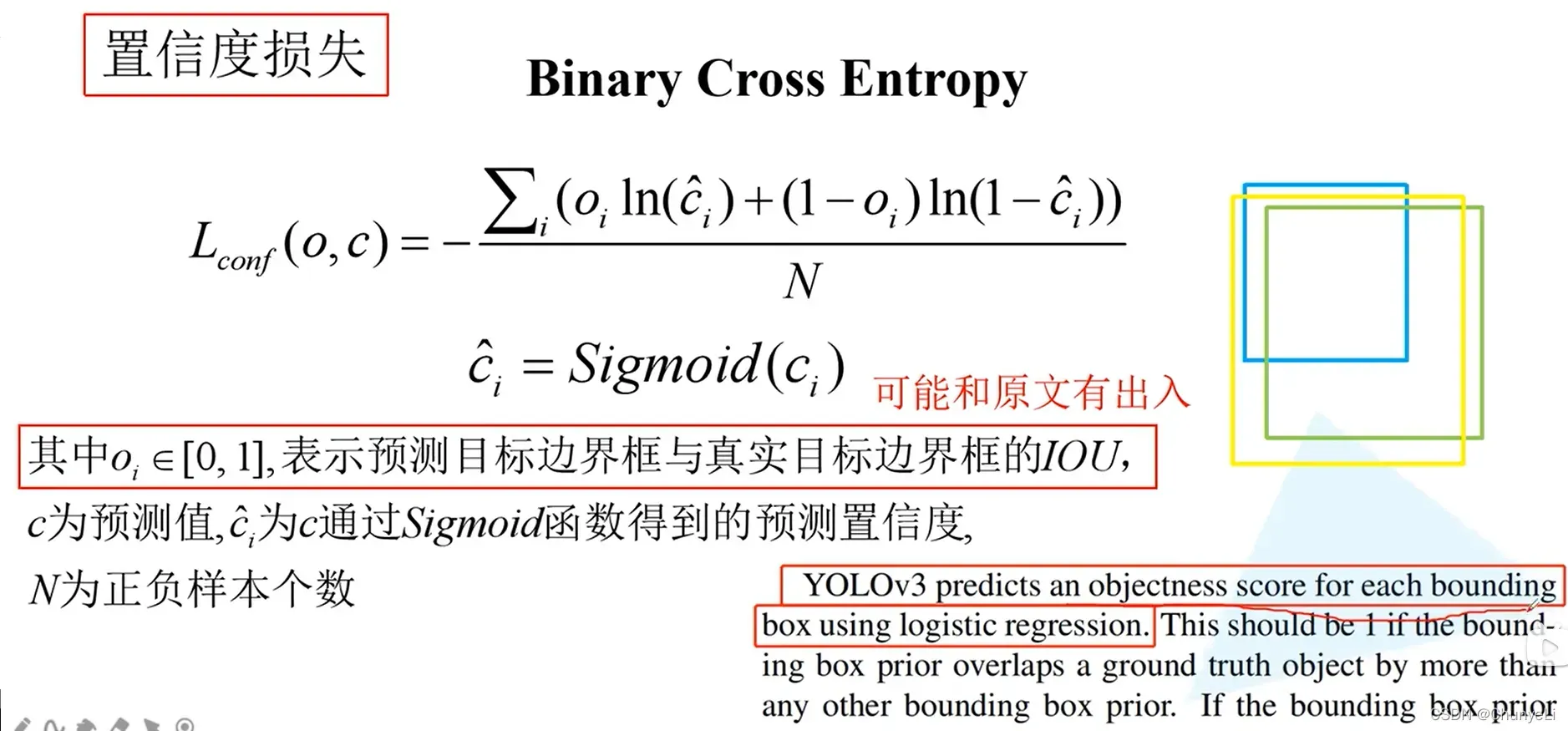
confidence损失的前一项是正样本(C=1)的损失计算,后者是负样本的( C=0)。
YOLOv1存在的问题:
1.因为每个cell只预测一组类别 ,所以对群体聚集的小目标检测结果较差。
2.输入尺寸变化时,检测效果较差;
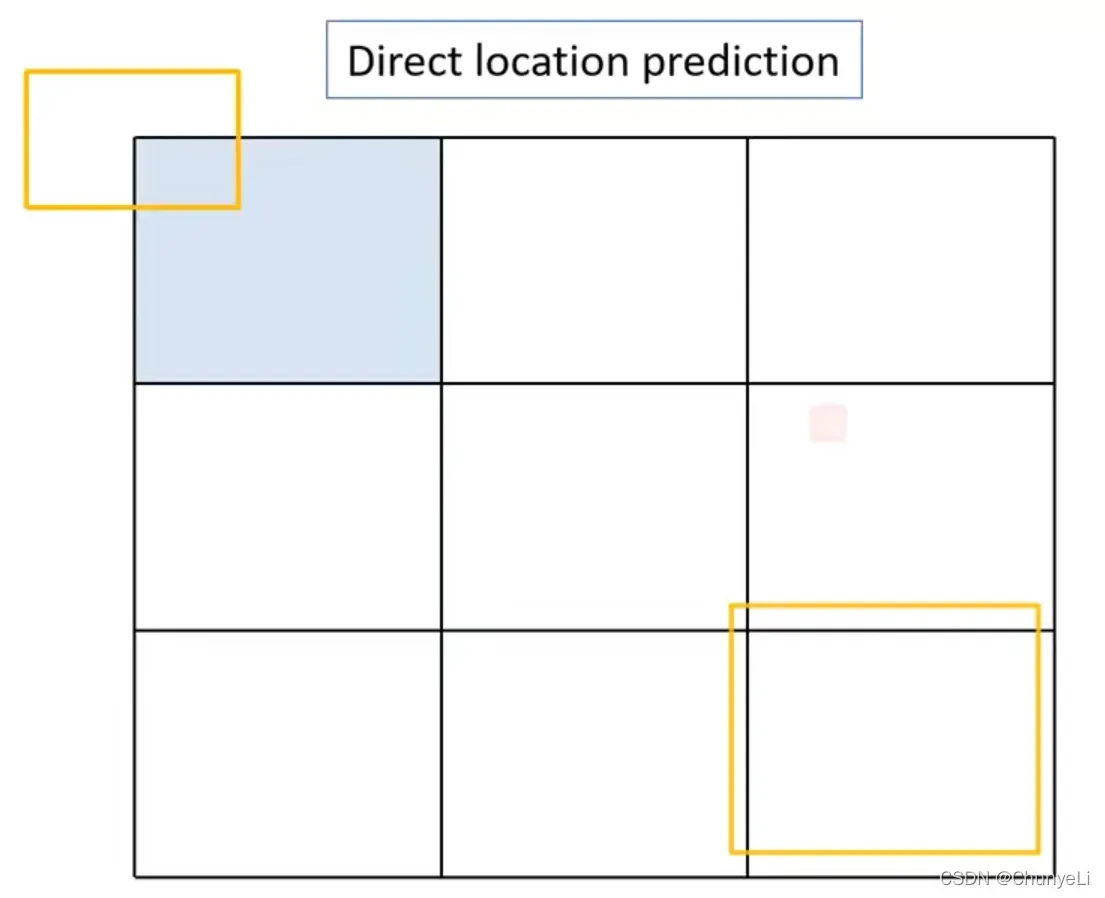
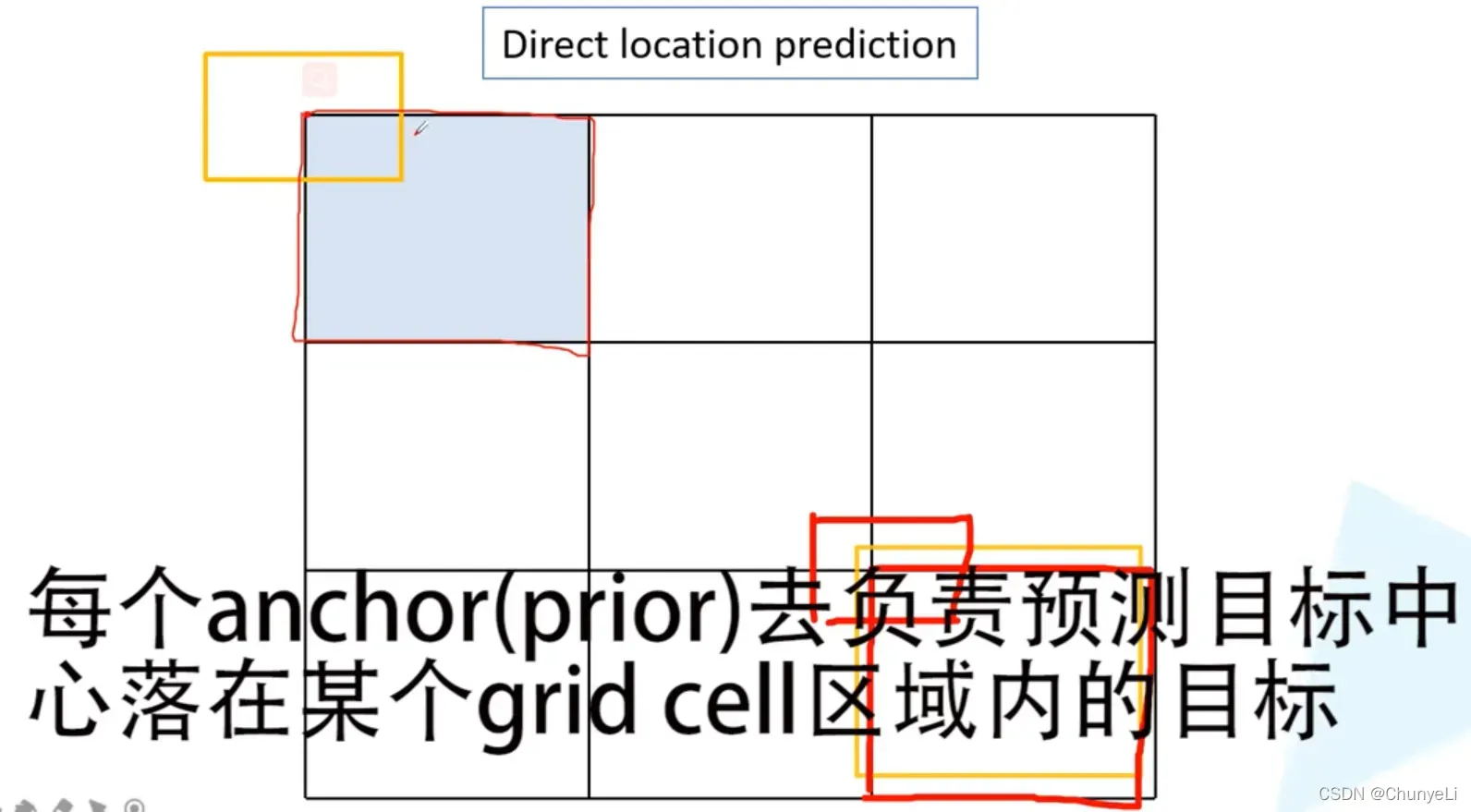
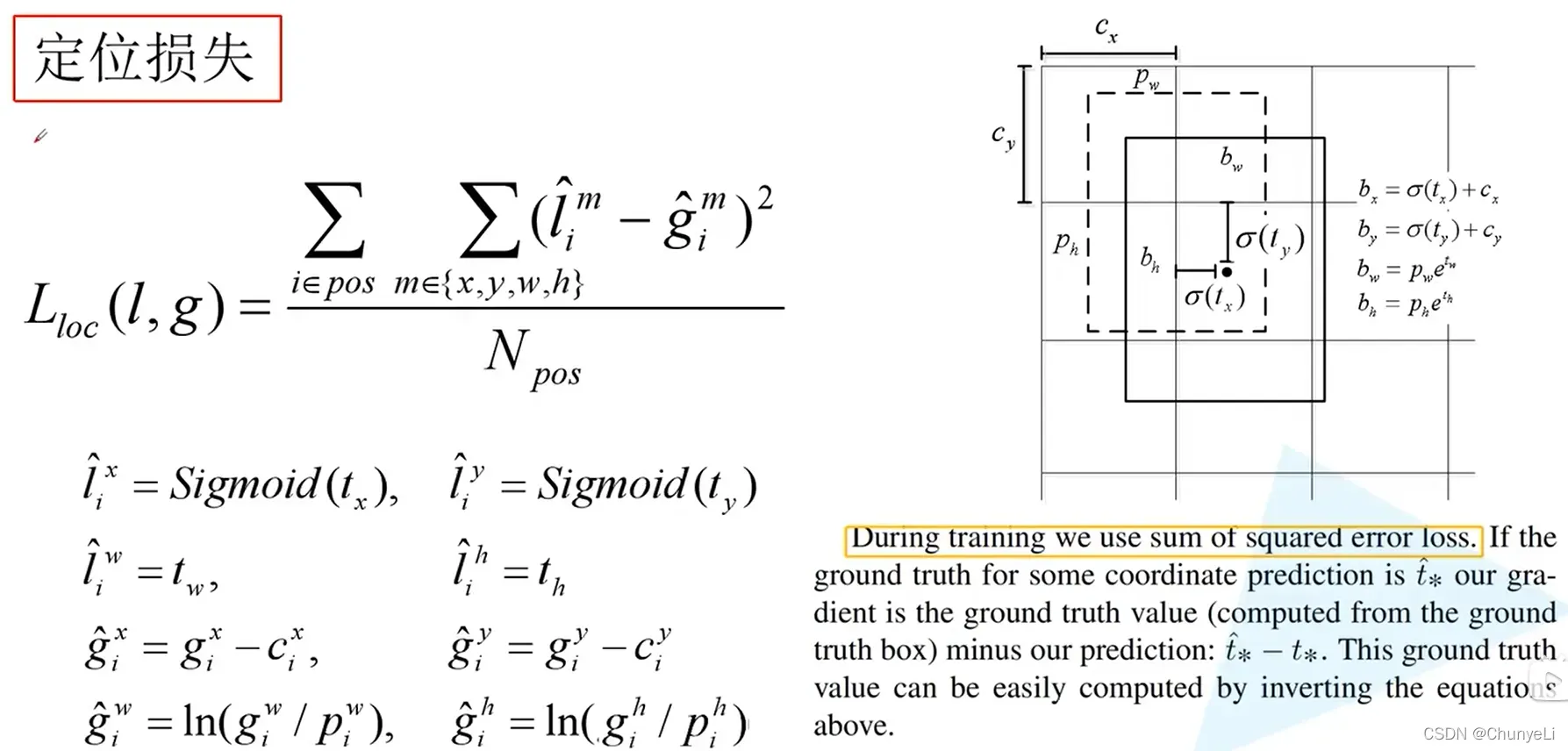
3.定位不准确。(因为直接预测坐标信息)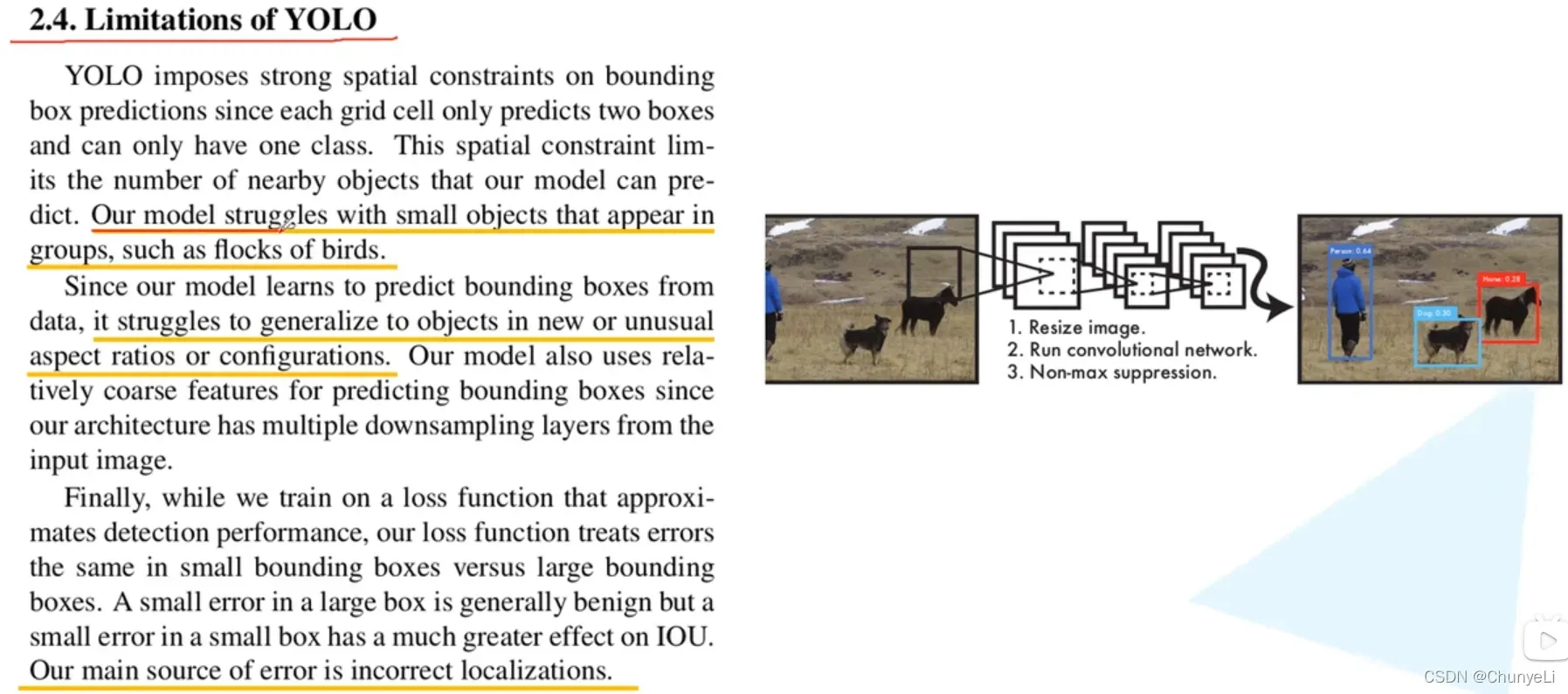
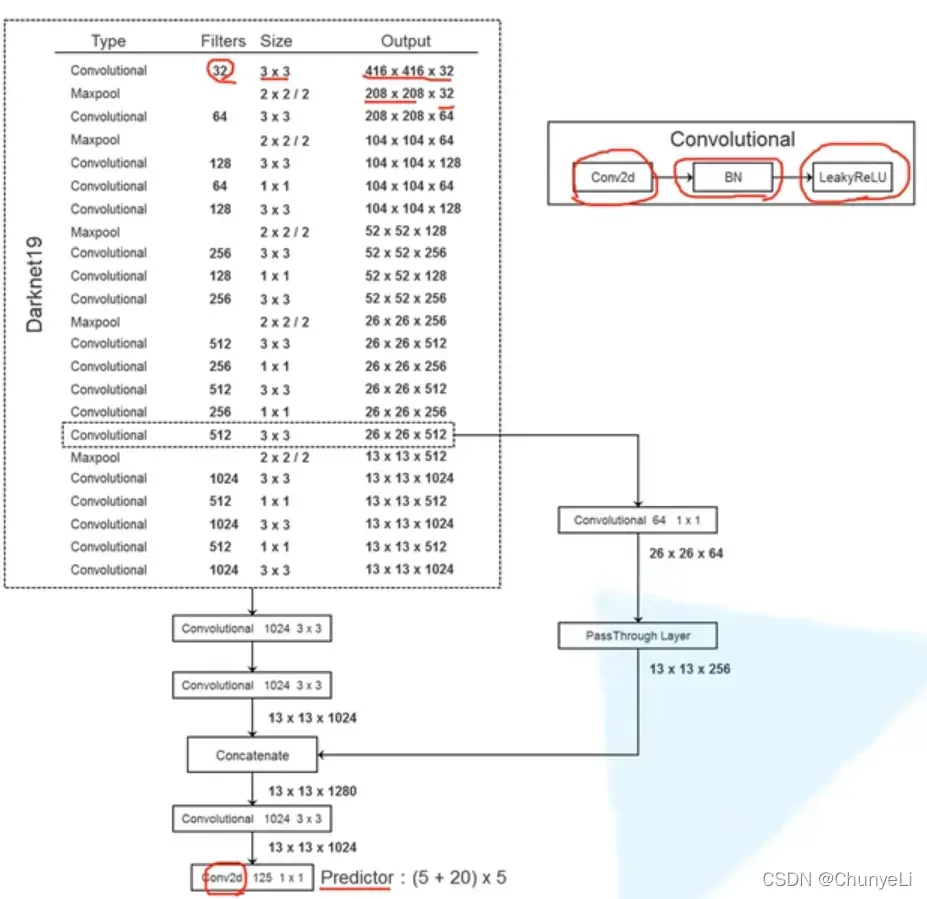
yolo2
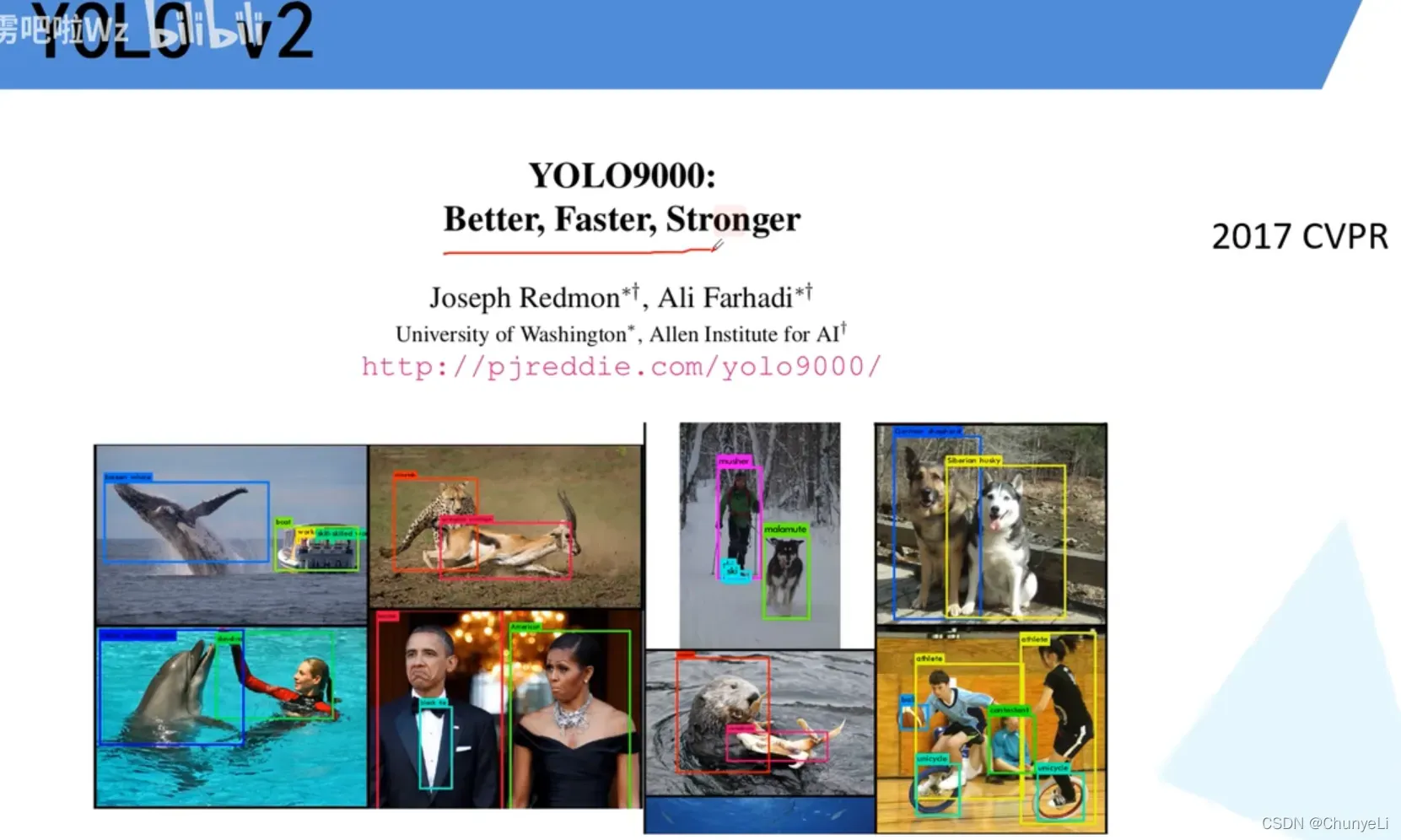
class大于9000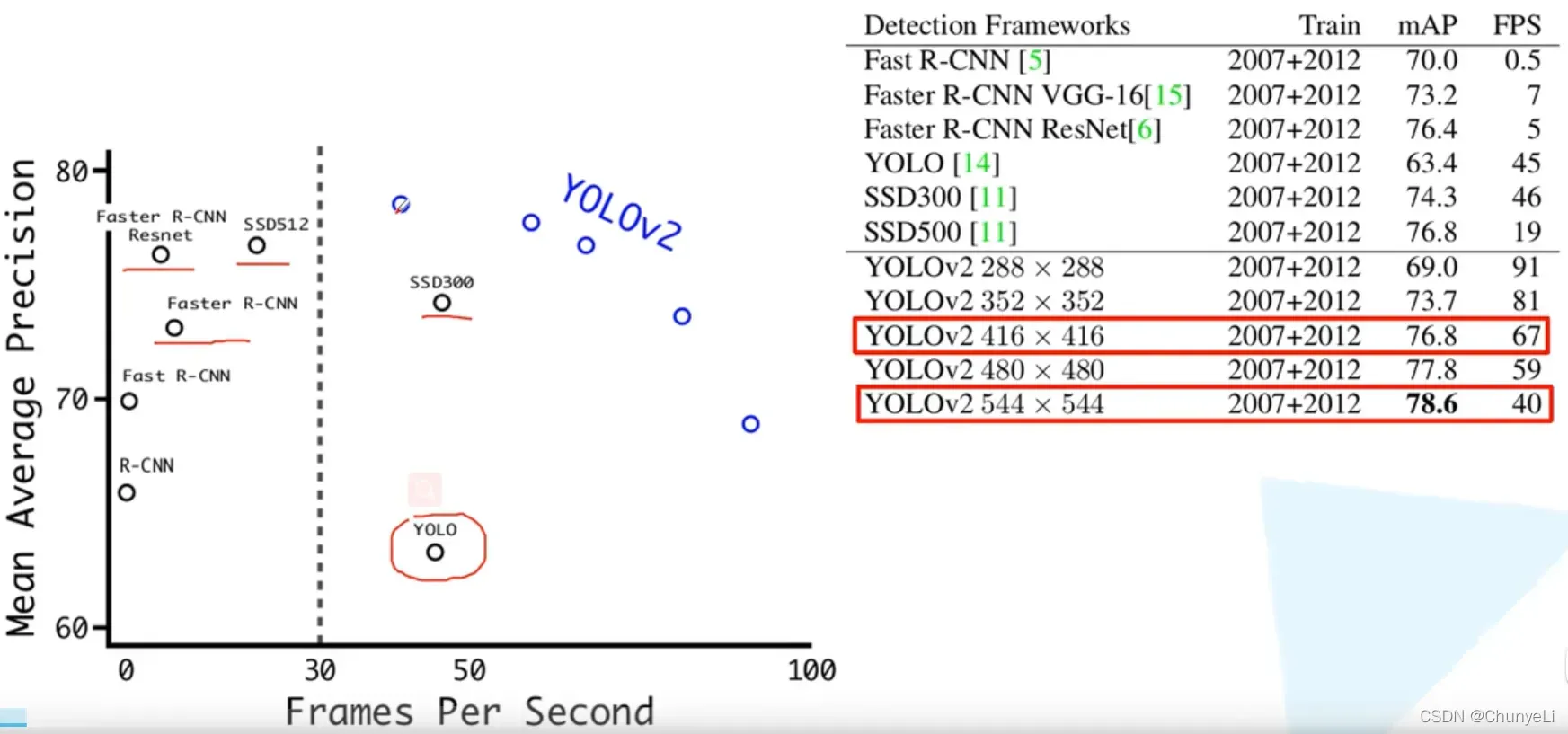
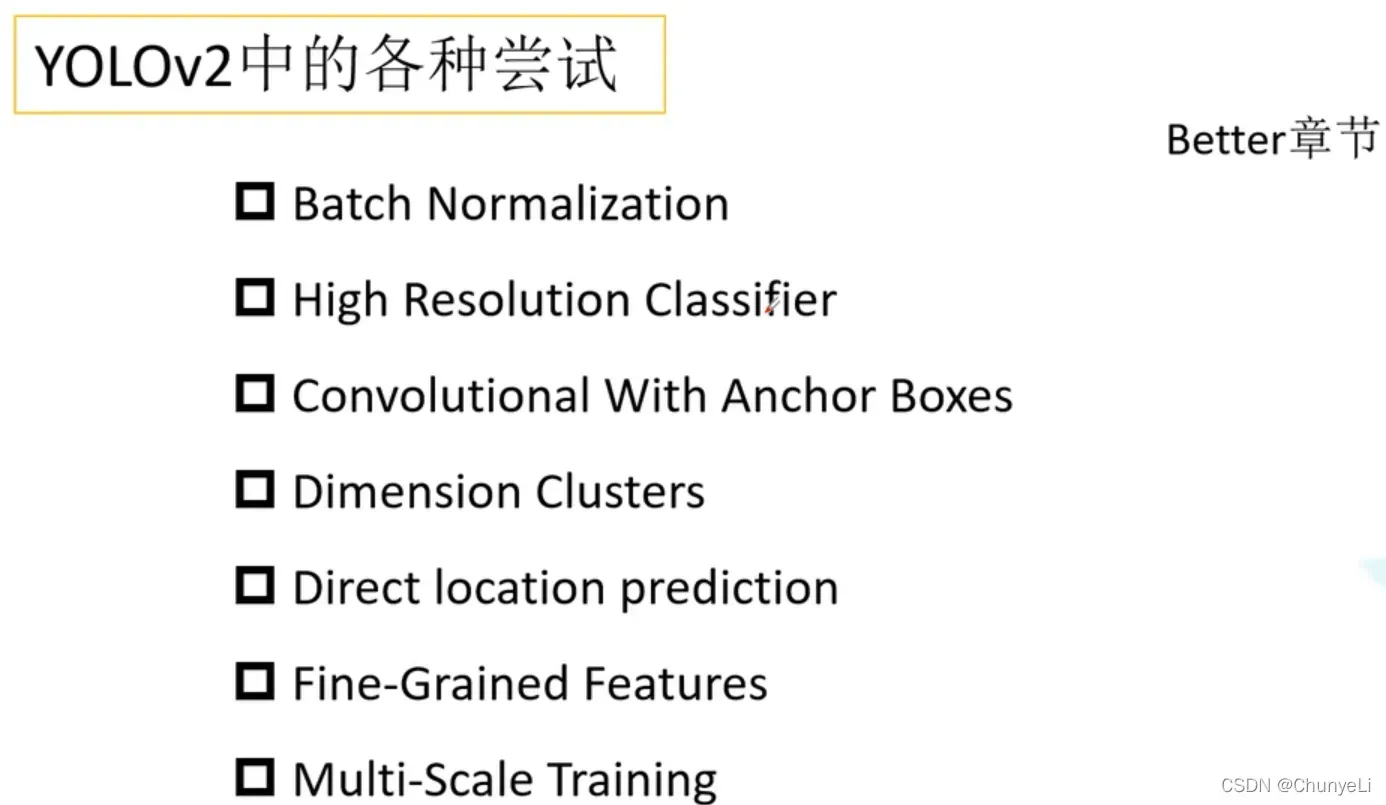
采用anchor偏移的方式,recall提升较高,map略微上升
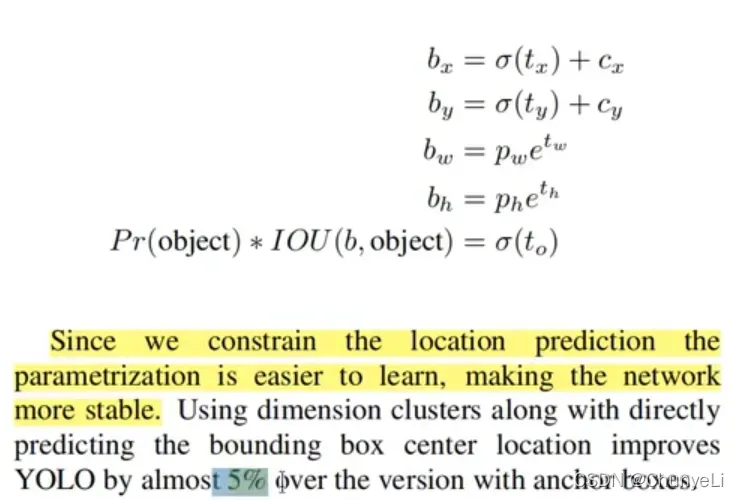
t_0是confidence,也受到sigmoid限制。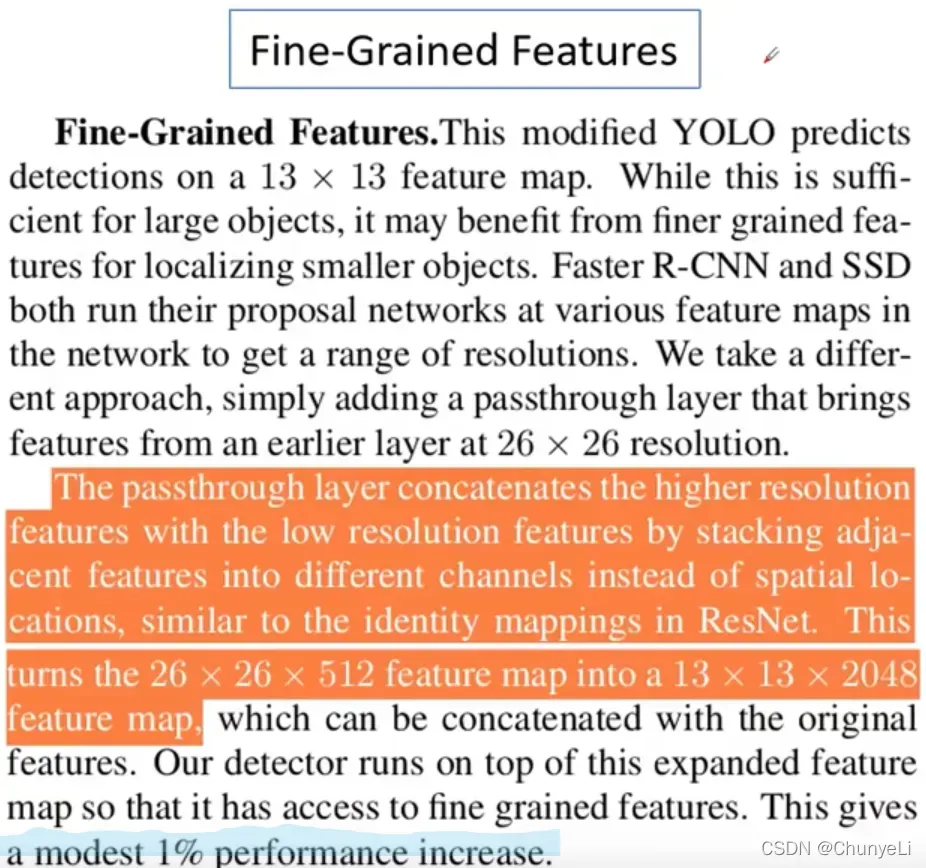
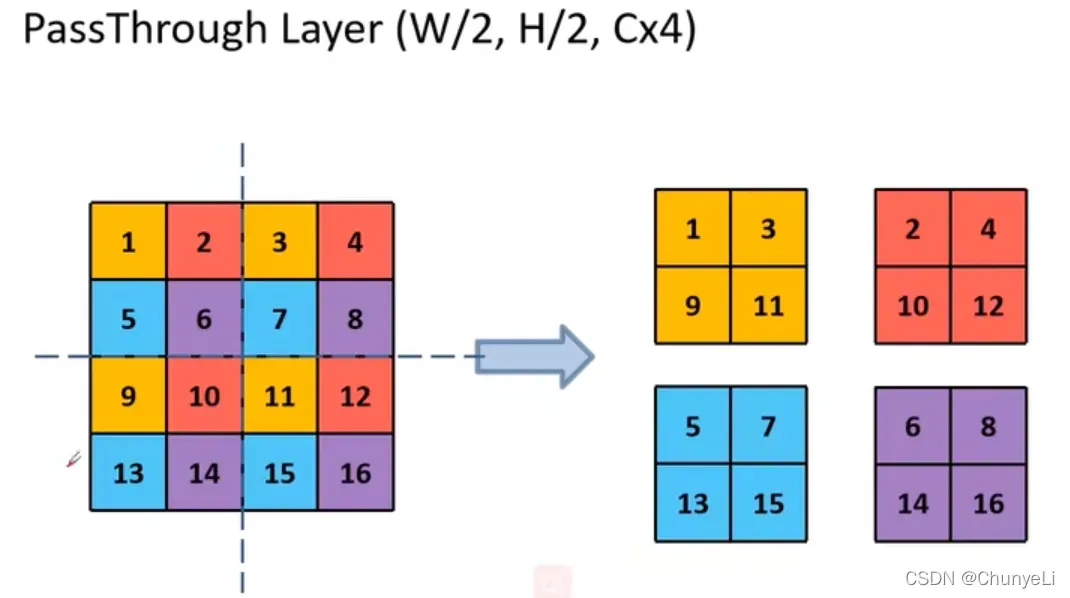
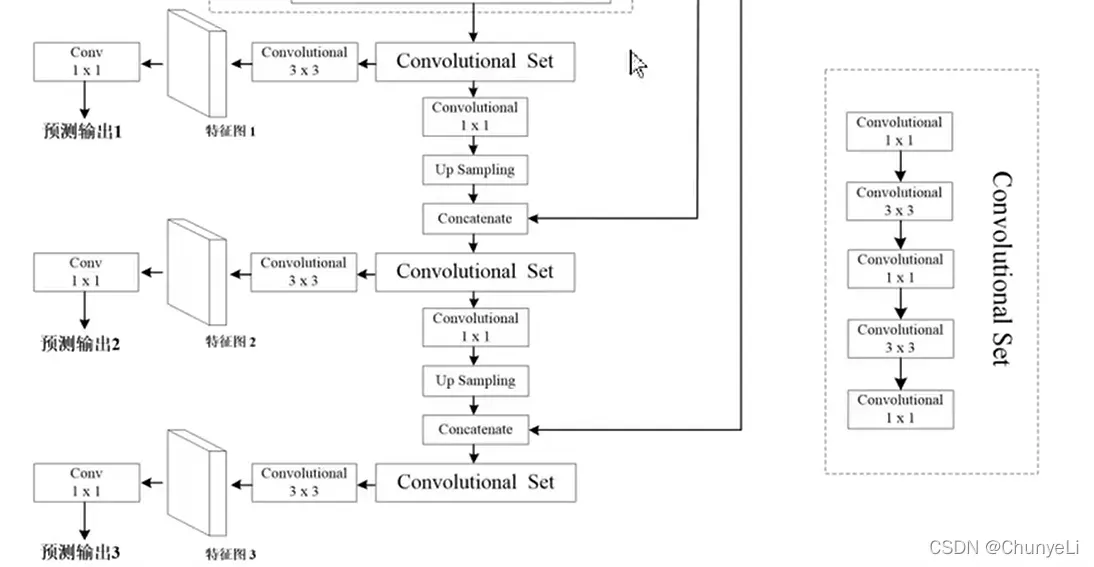
高层和底层信息融合,以便更好地提取详细信息。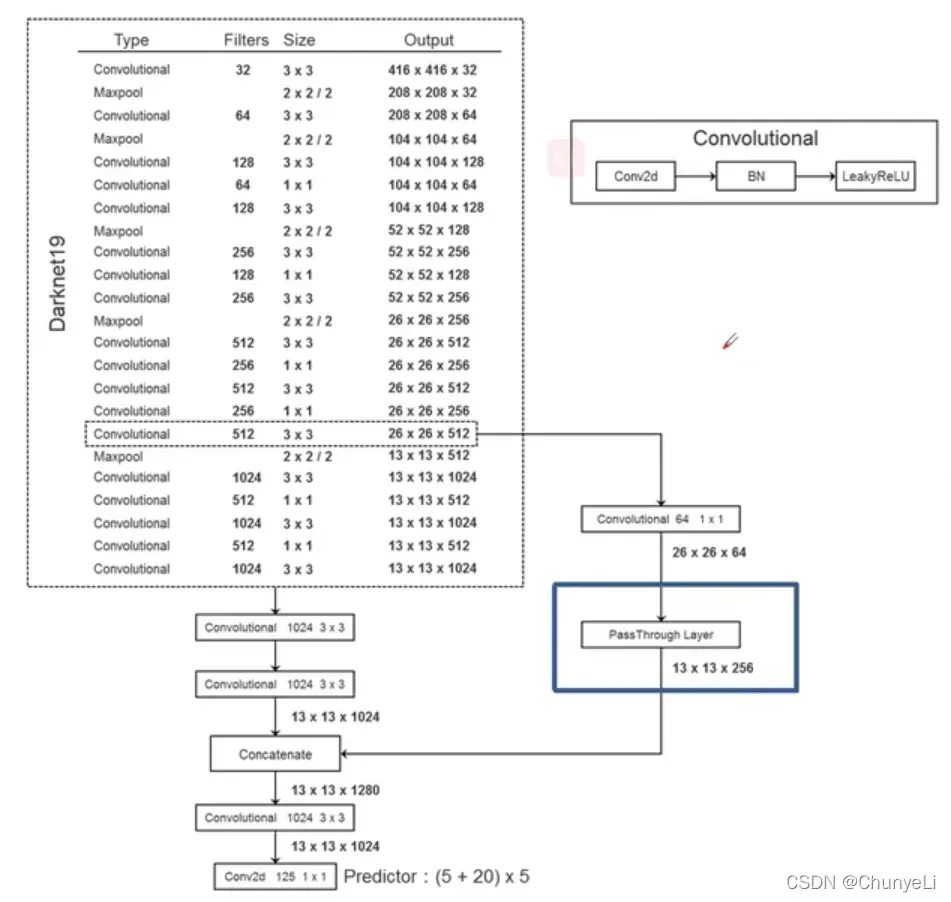
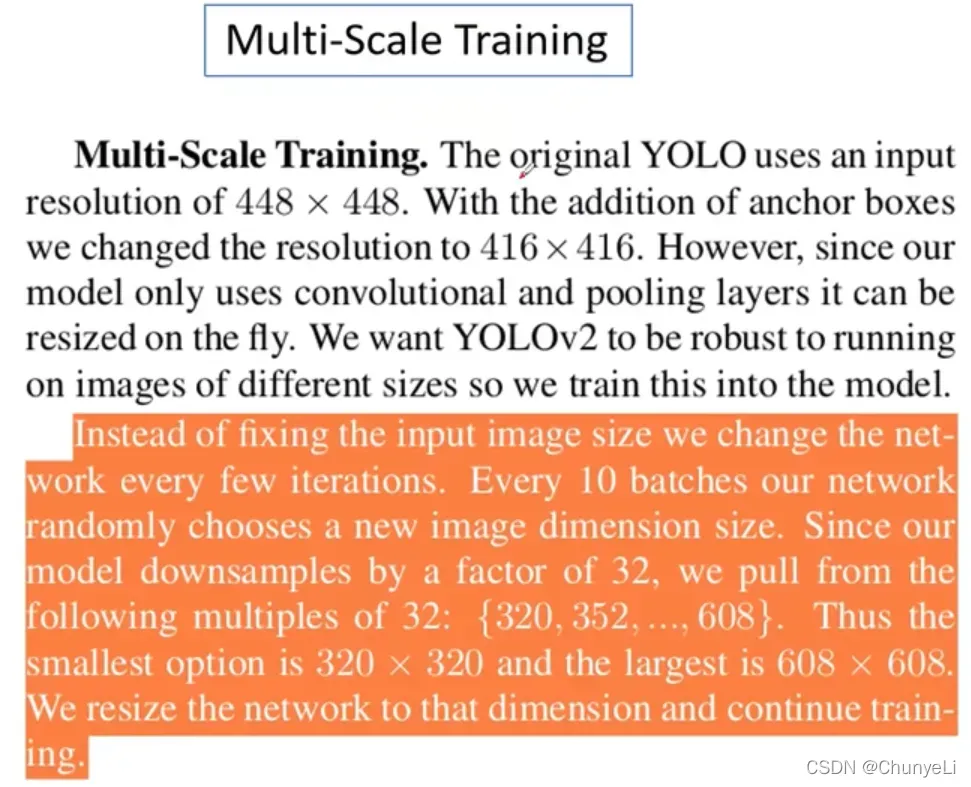
每10个batch,就随机输入网络的图片尺寸(32的倍数)。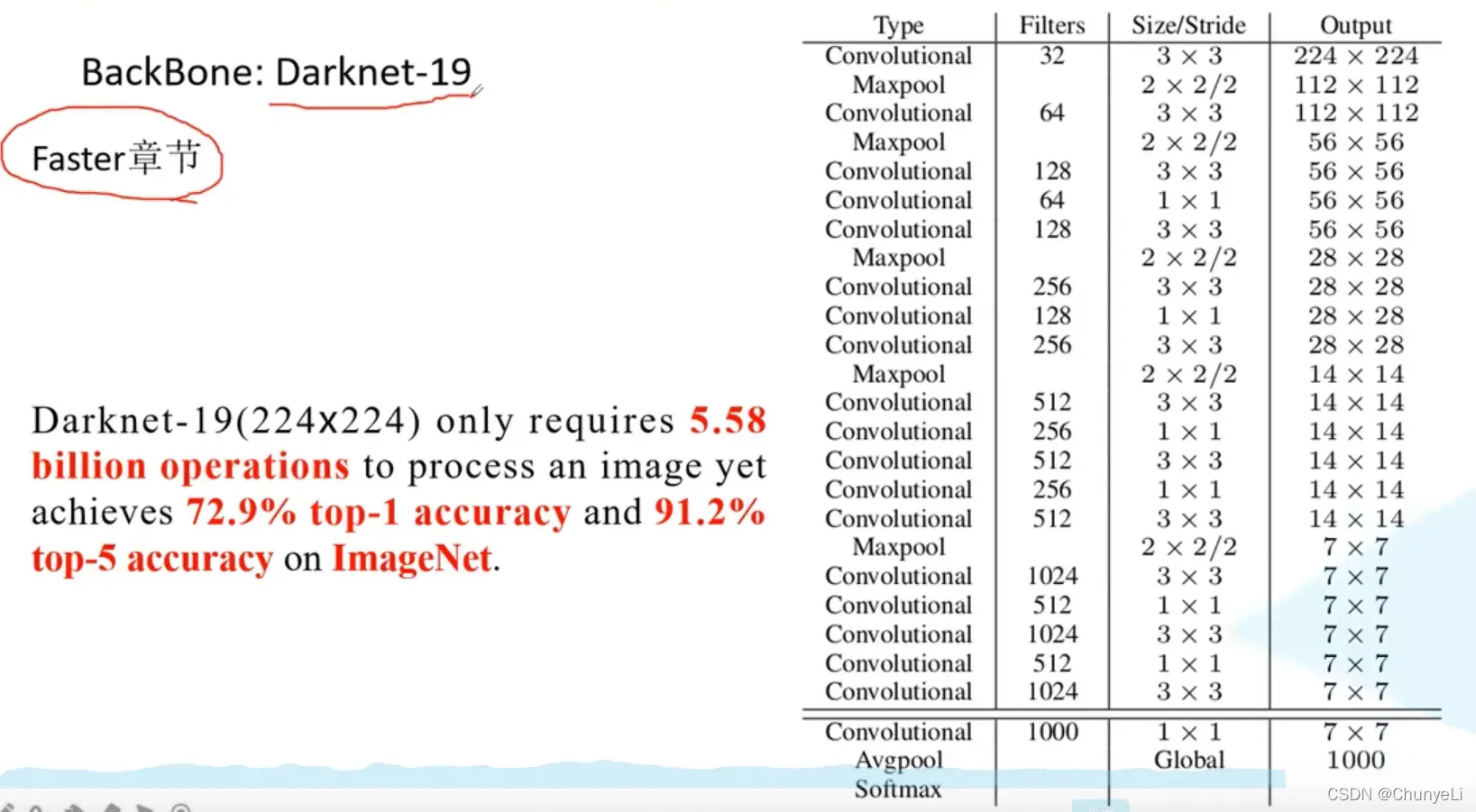
用224是为了方便对比。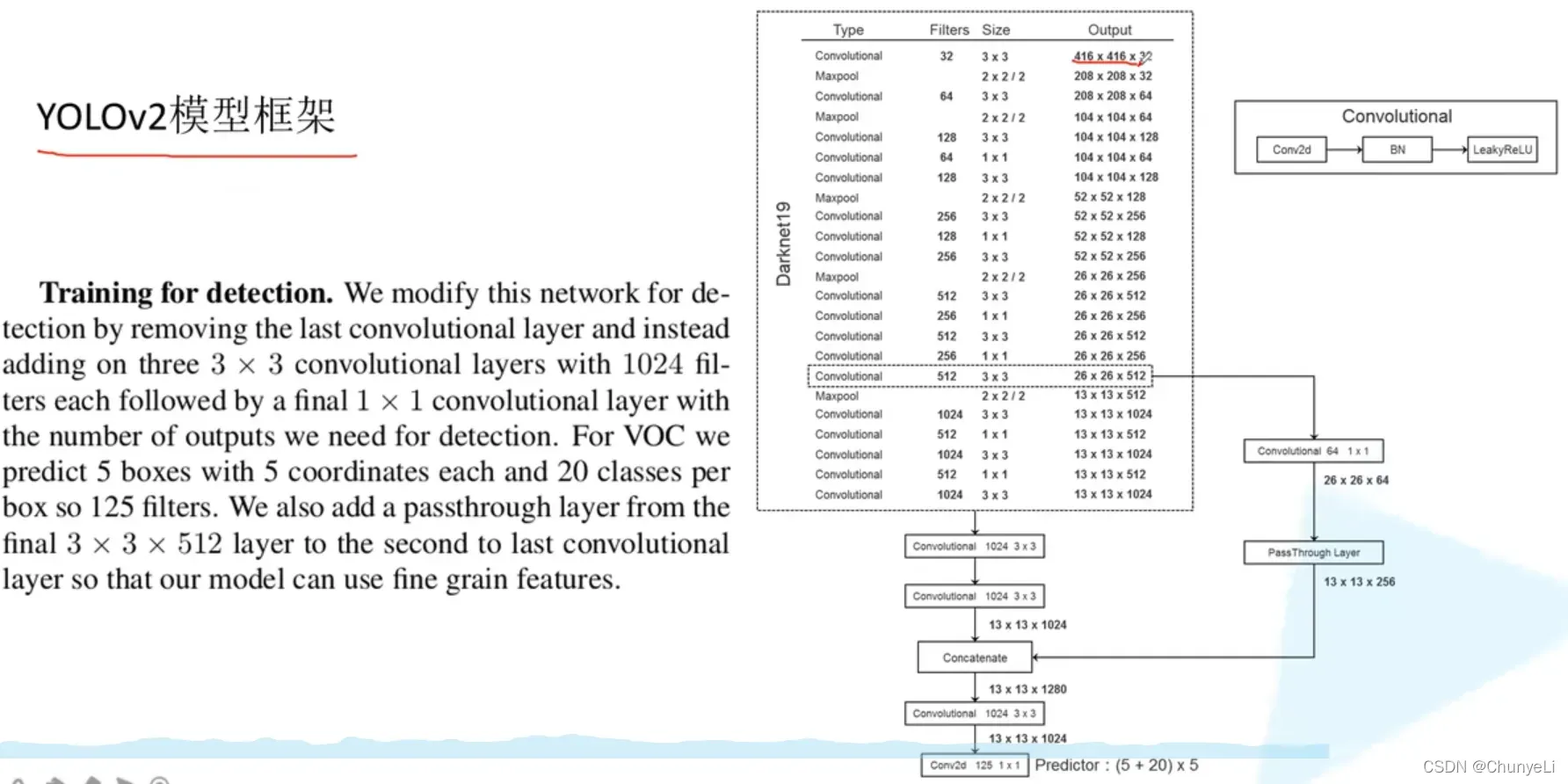
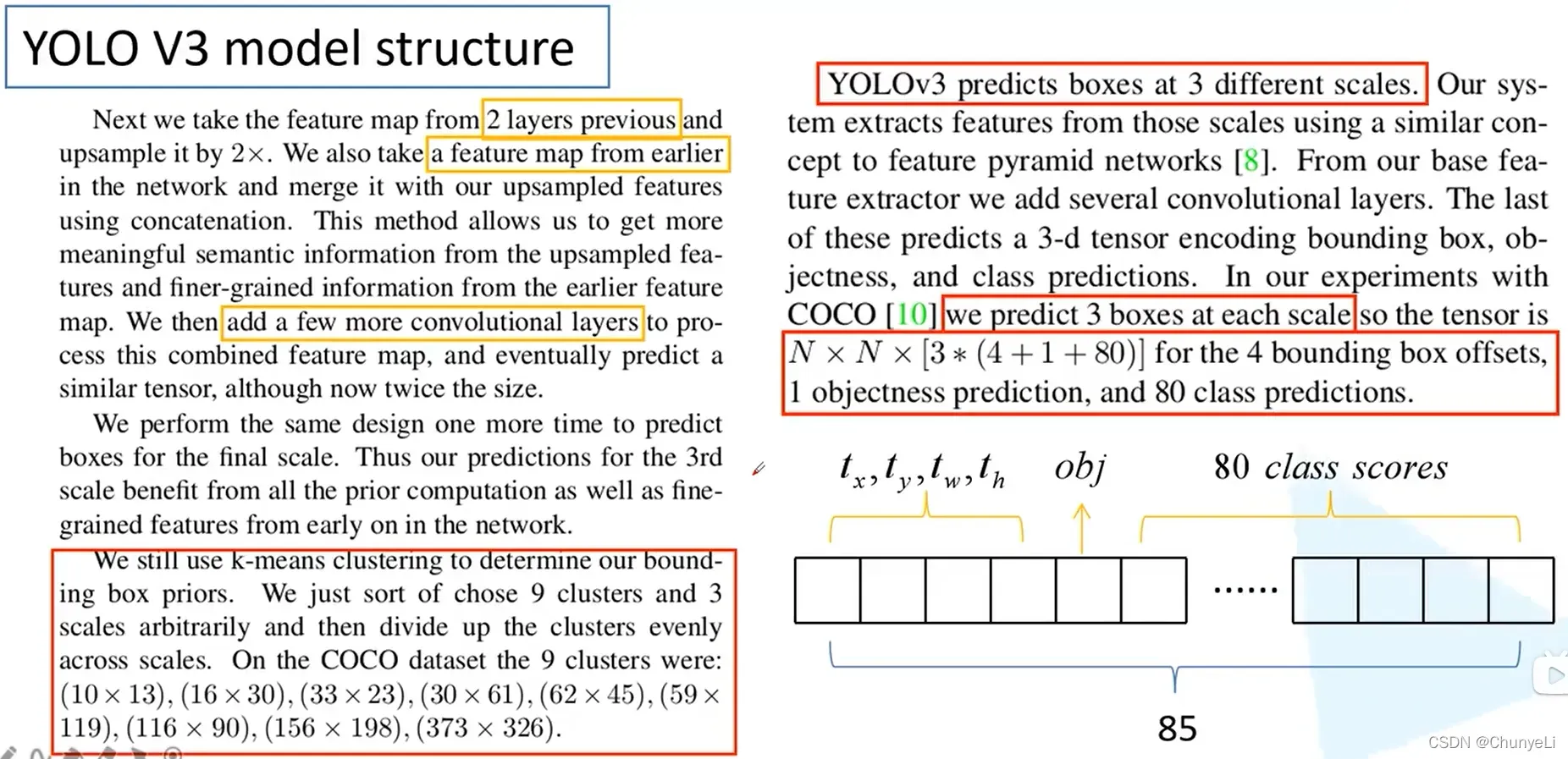
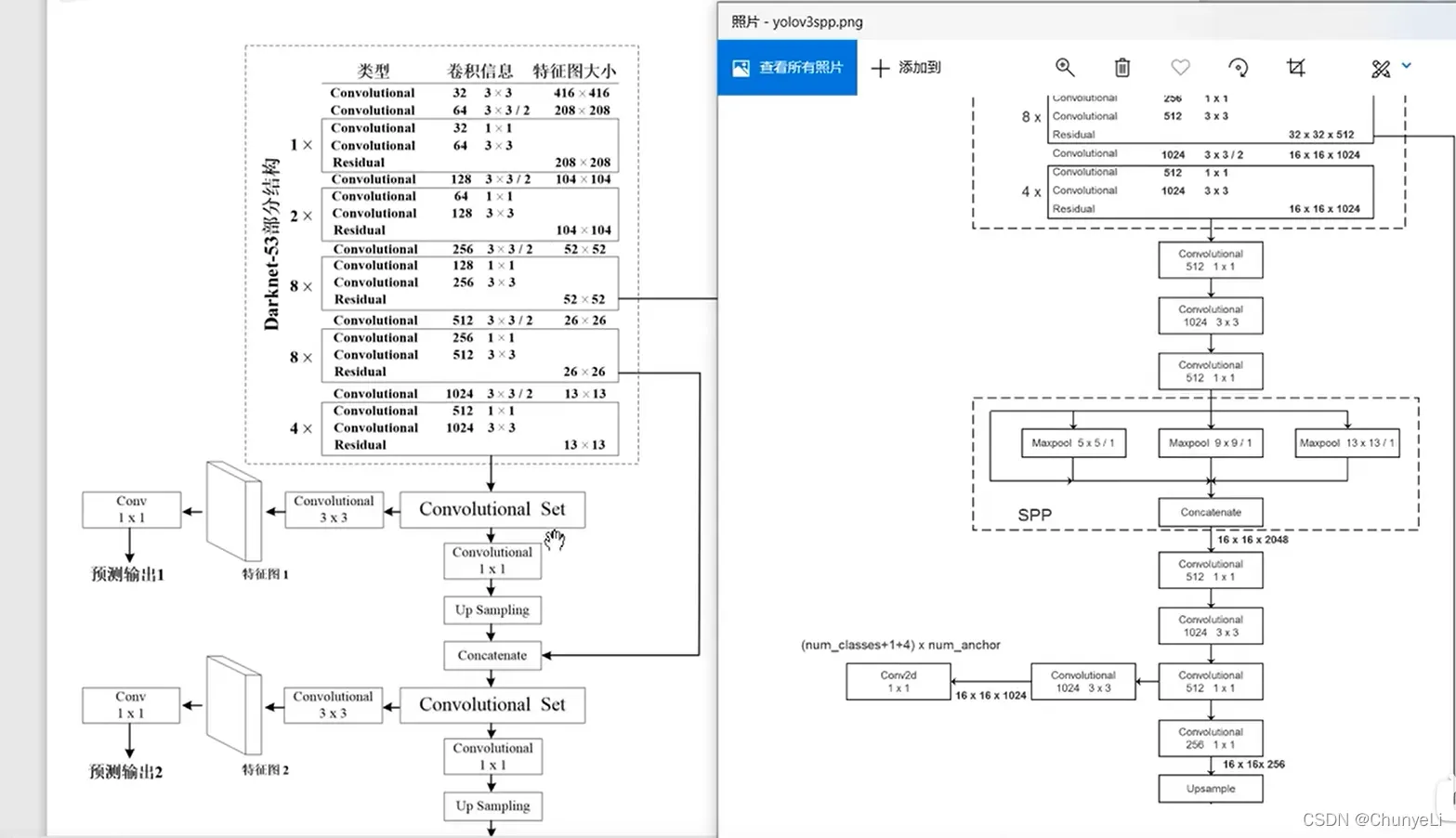
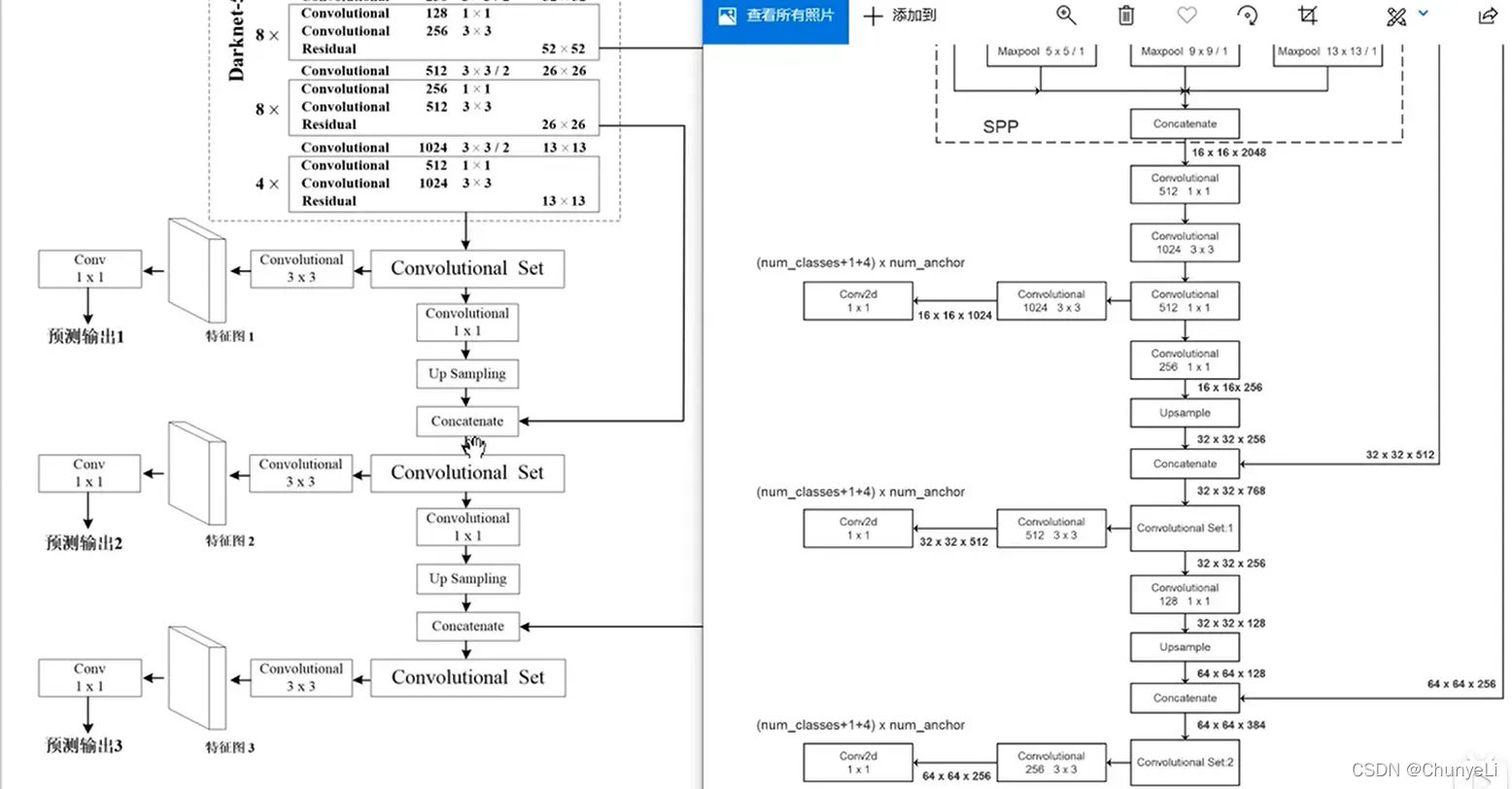
yolov3
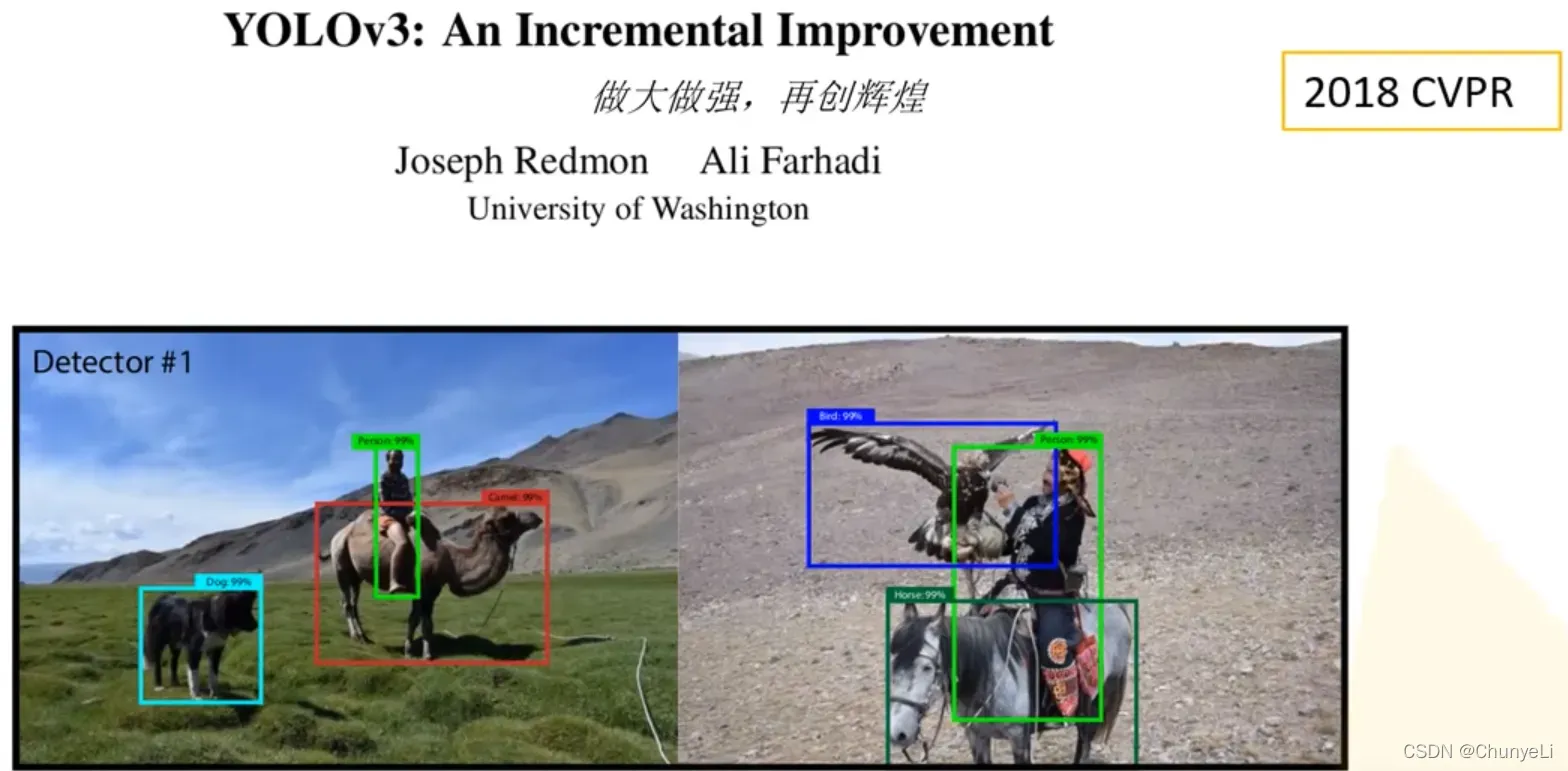
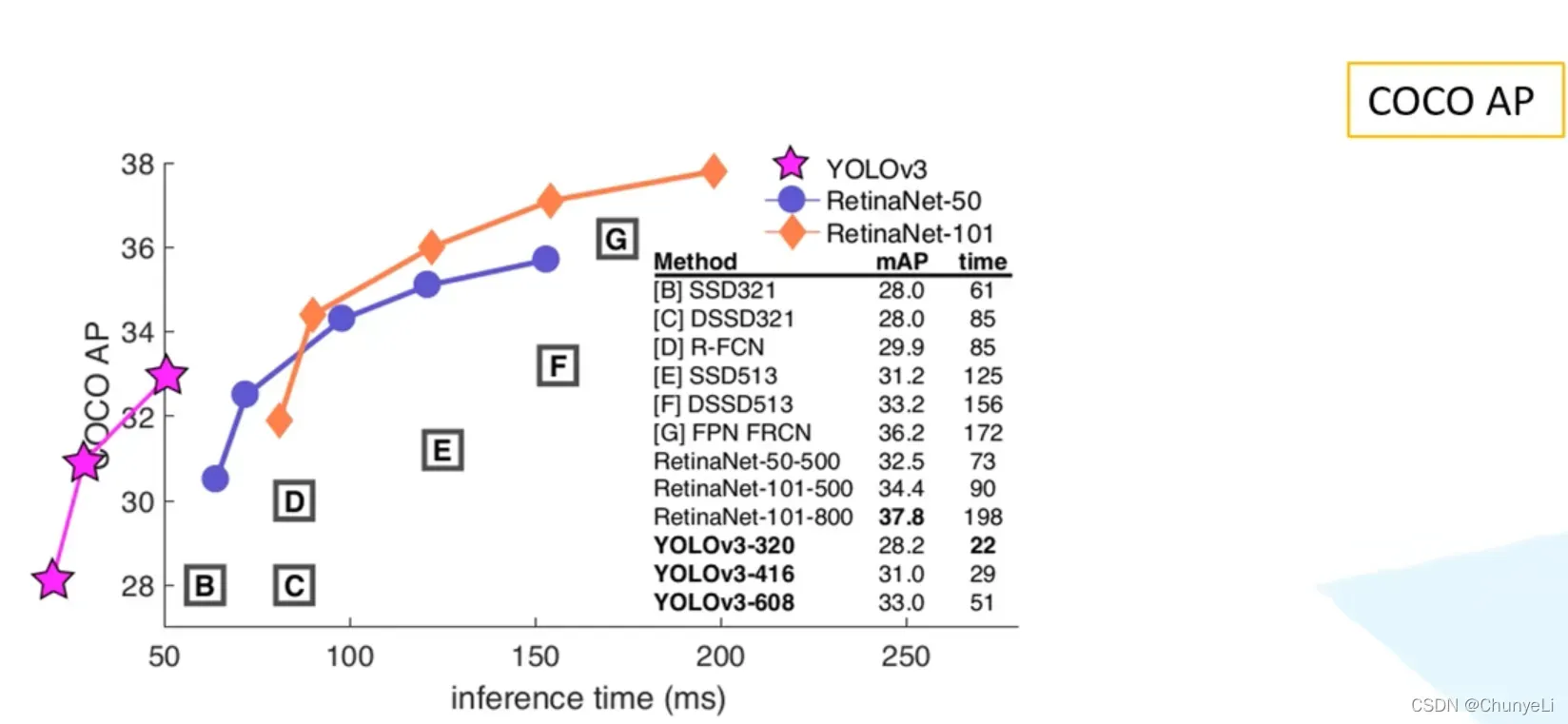
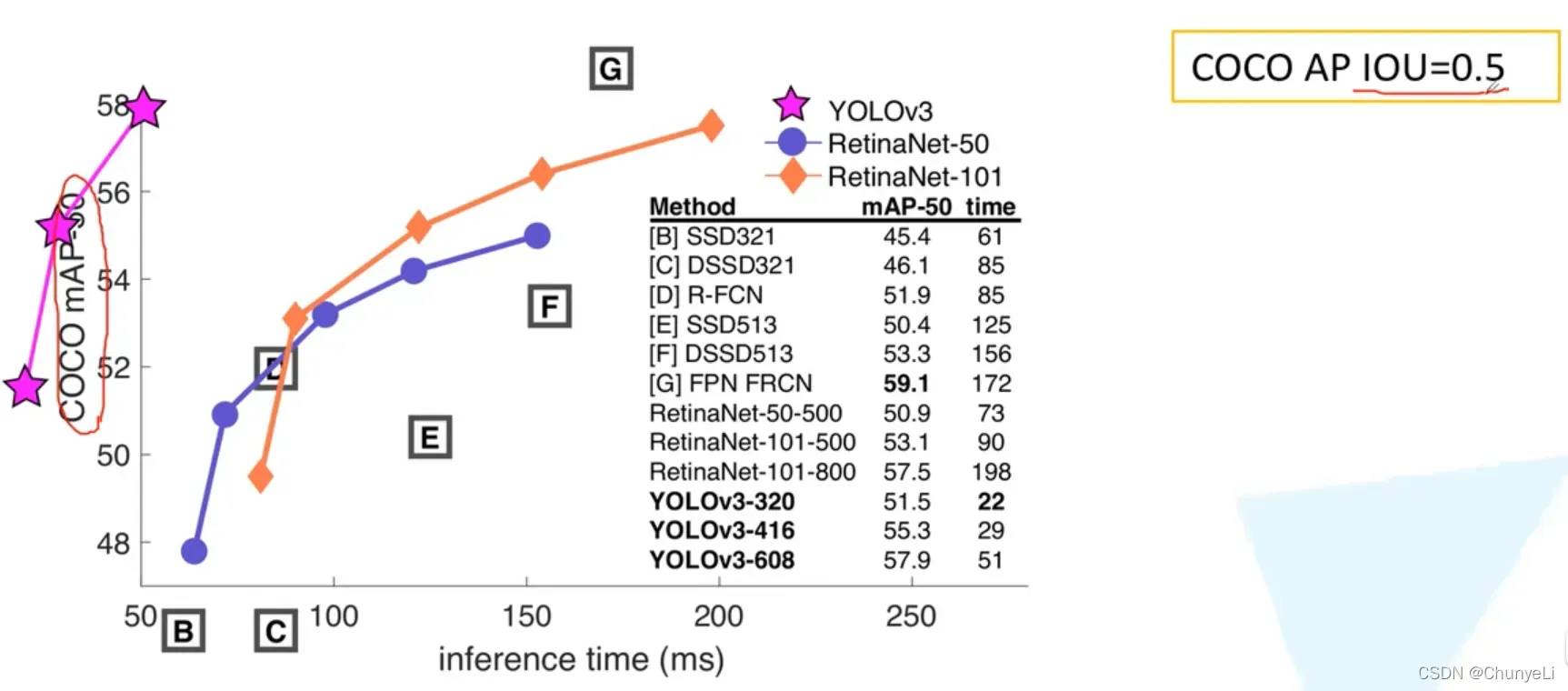
用了新的backbone,效果持平同时fps也比较高。和resnet相比,没有最大池化层,而是用了卷积。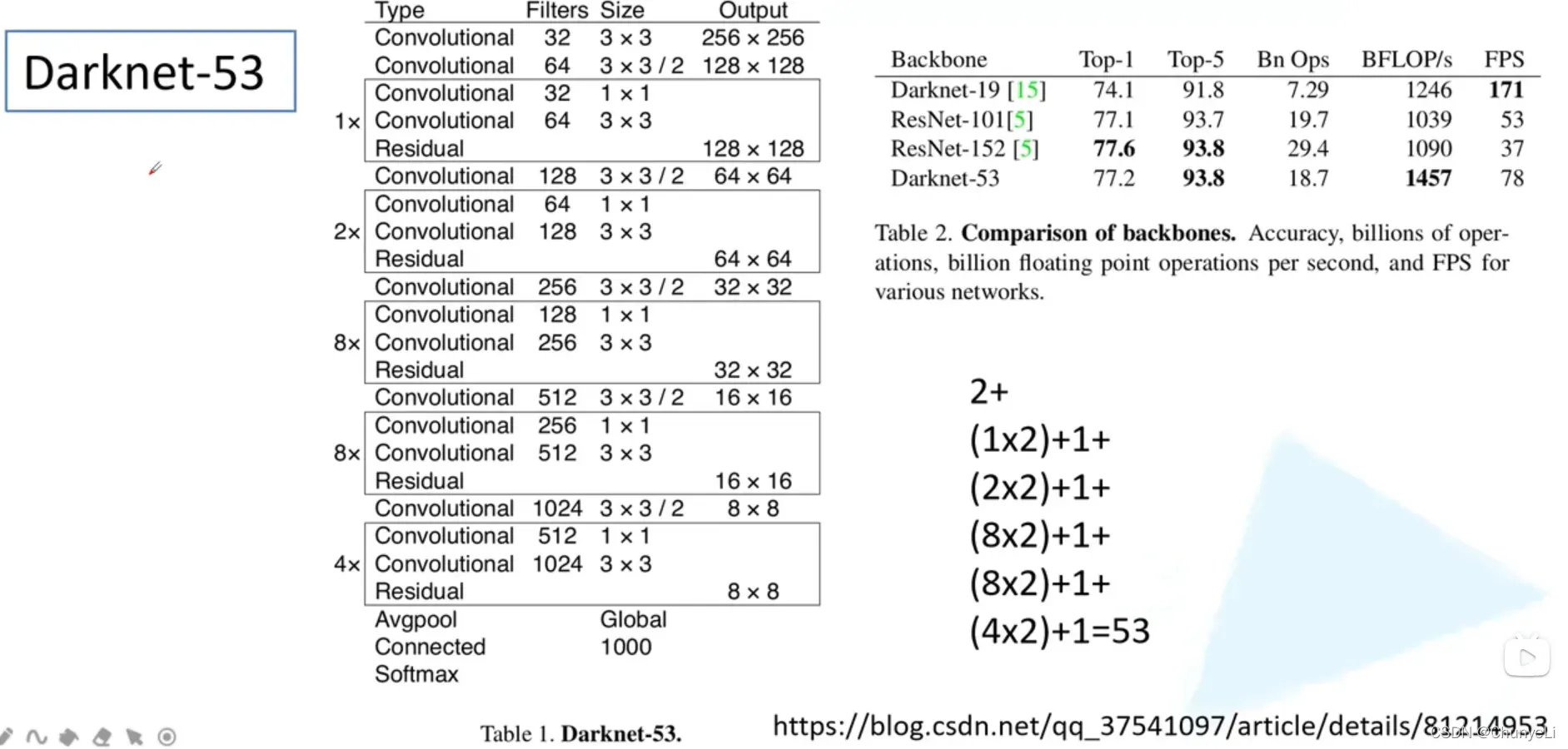
http://blog.csdn.net/qq_37541097/article/details/81214953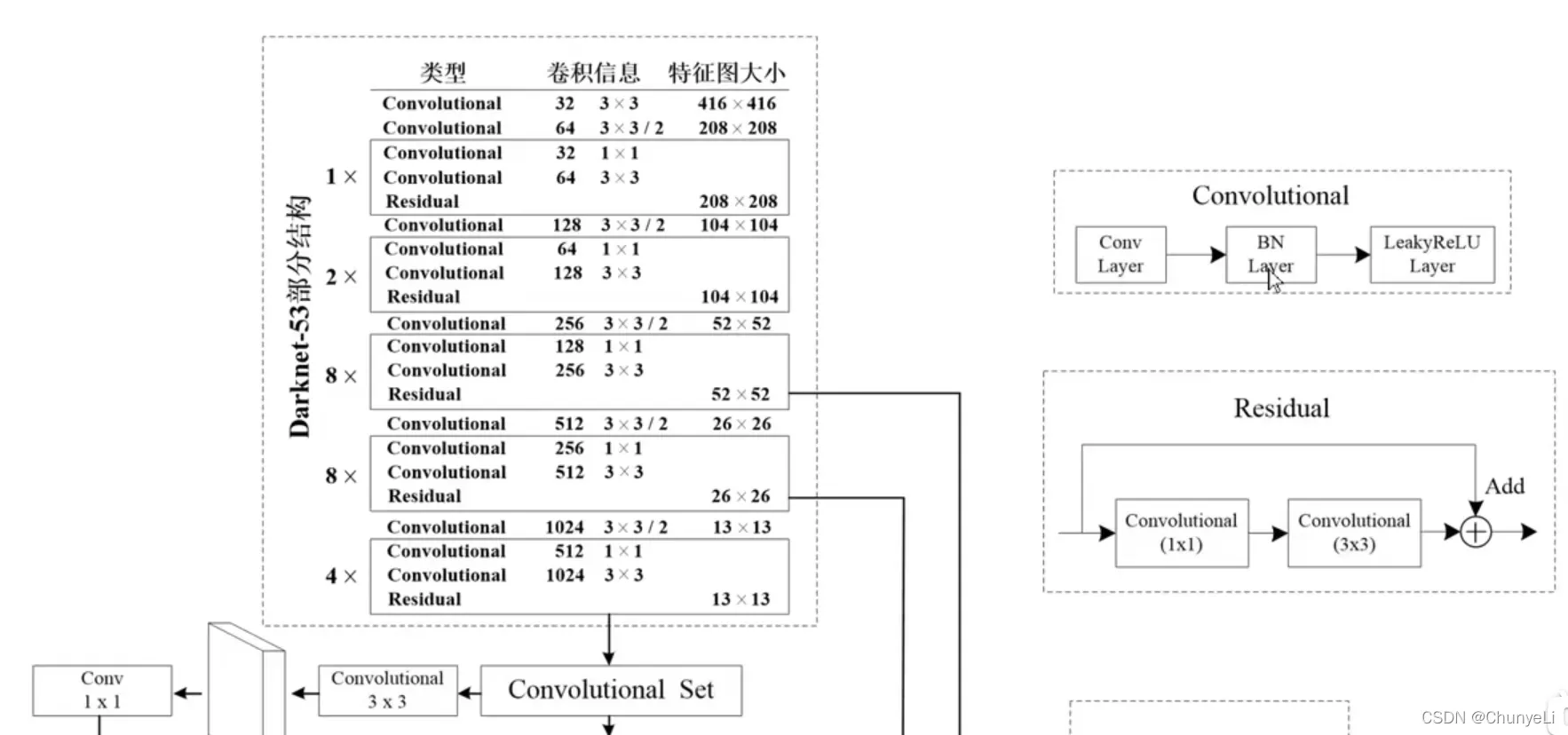
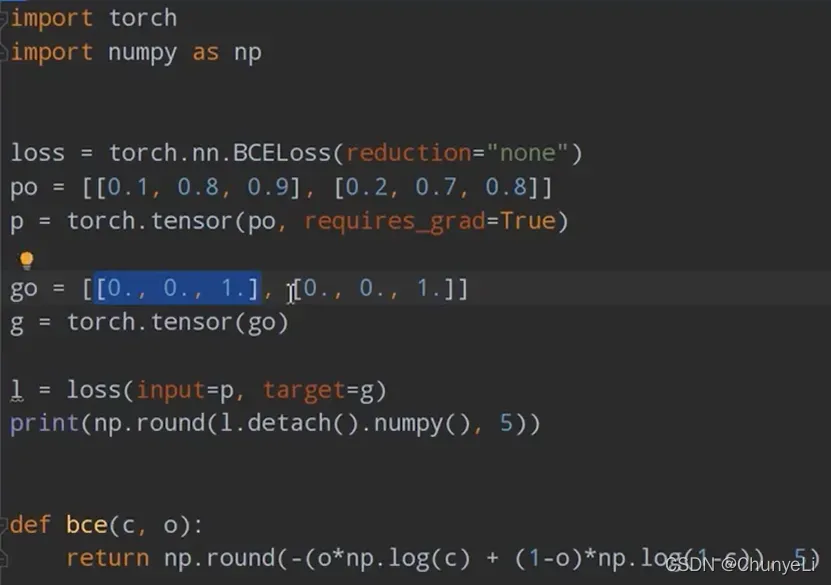
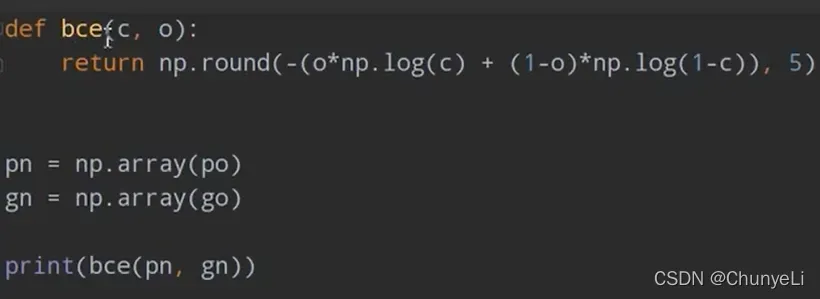
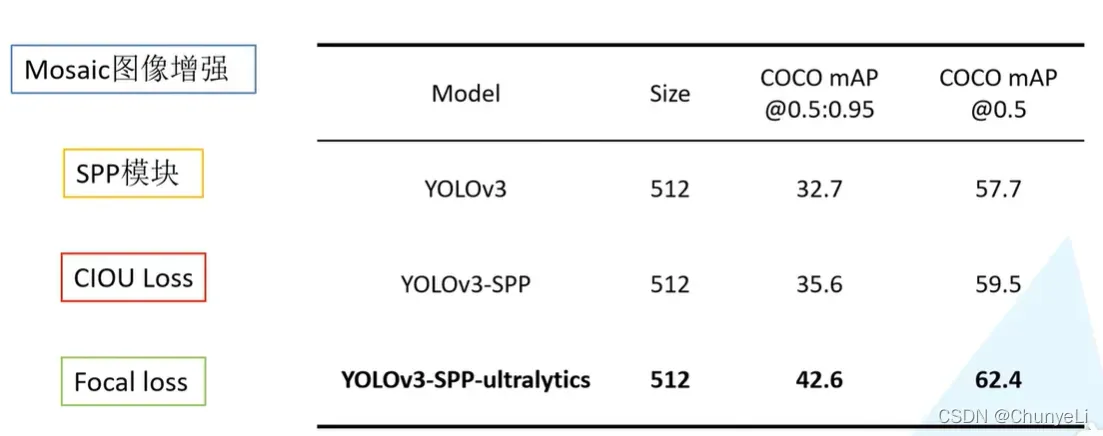
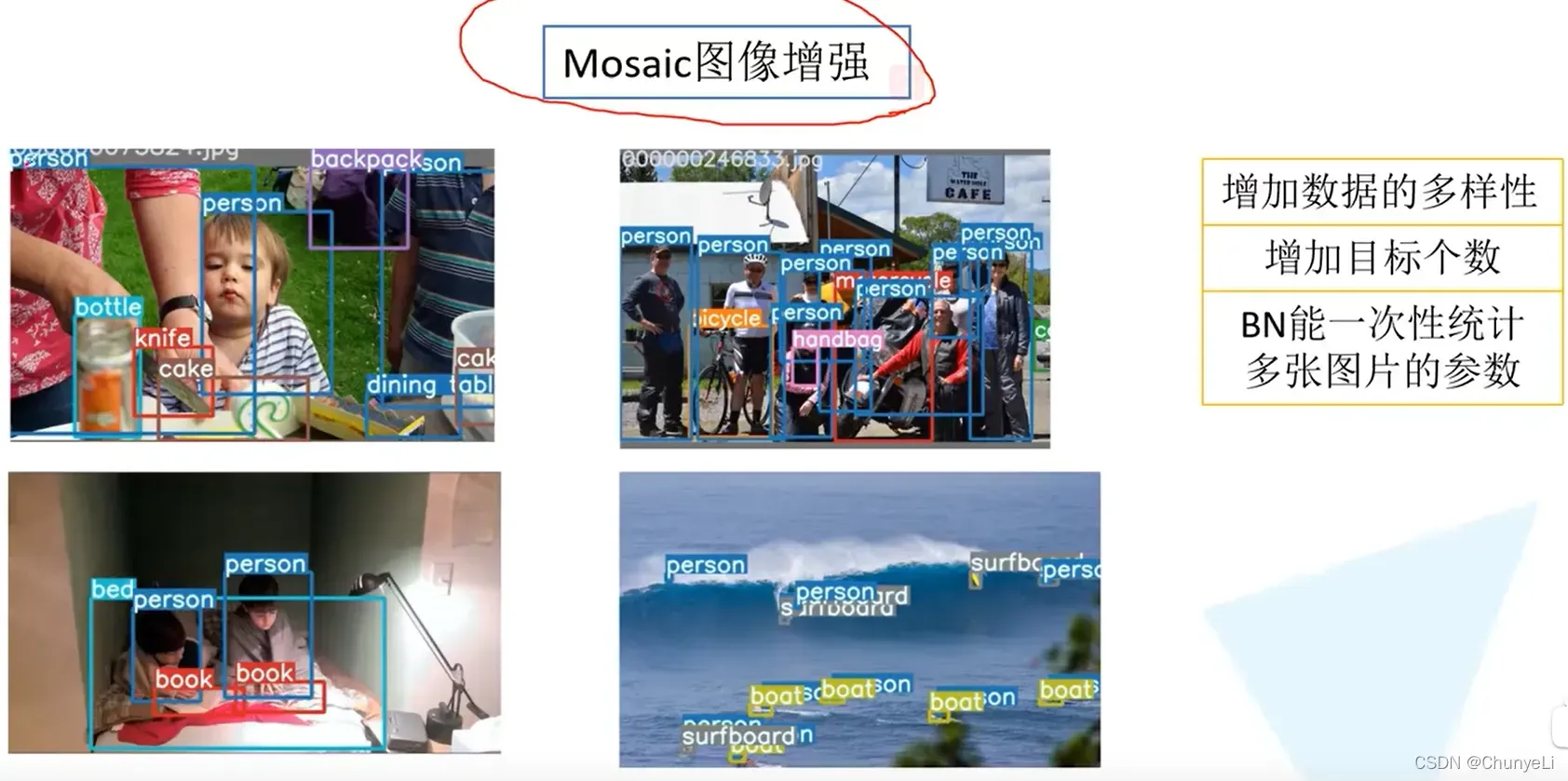
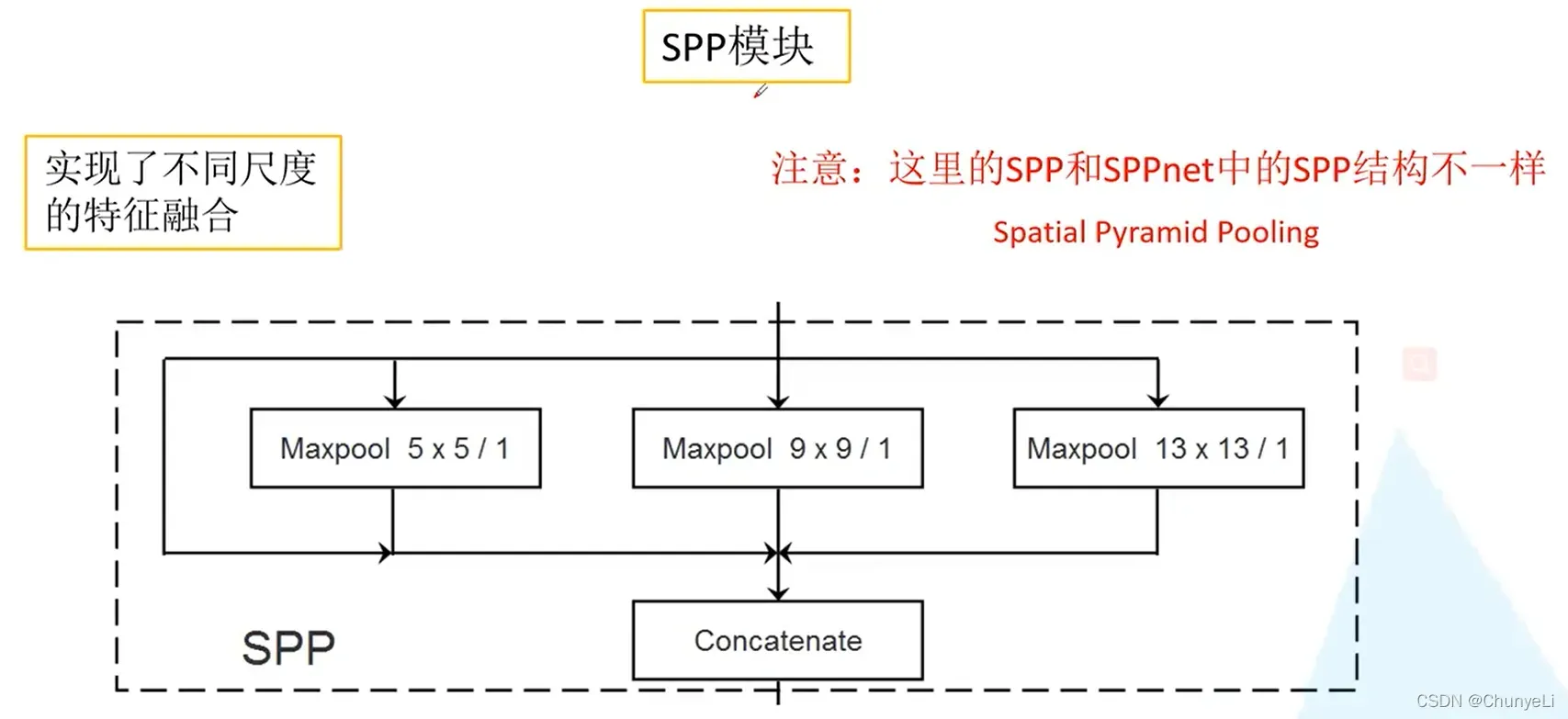
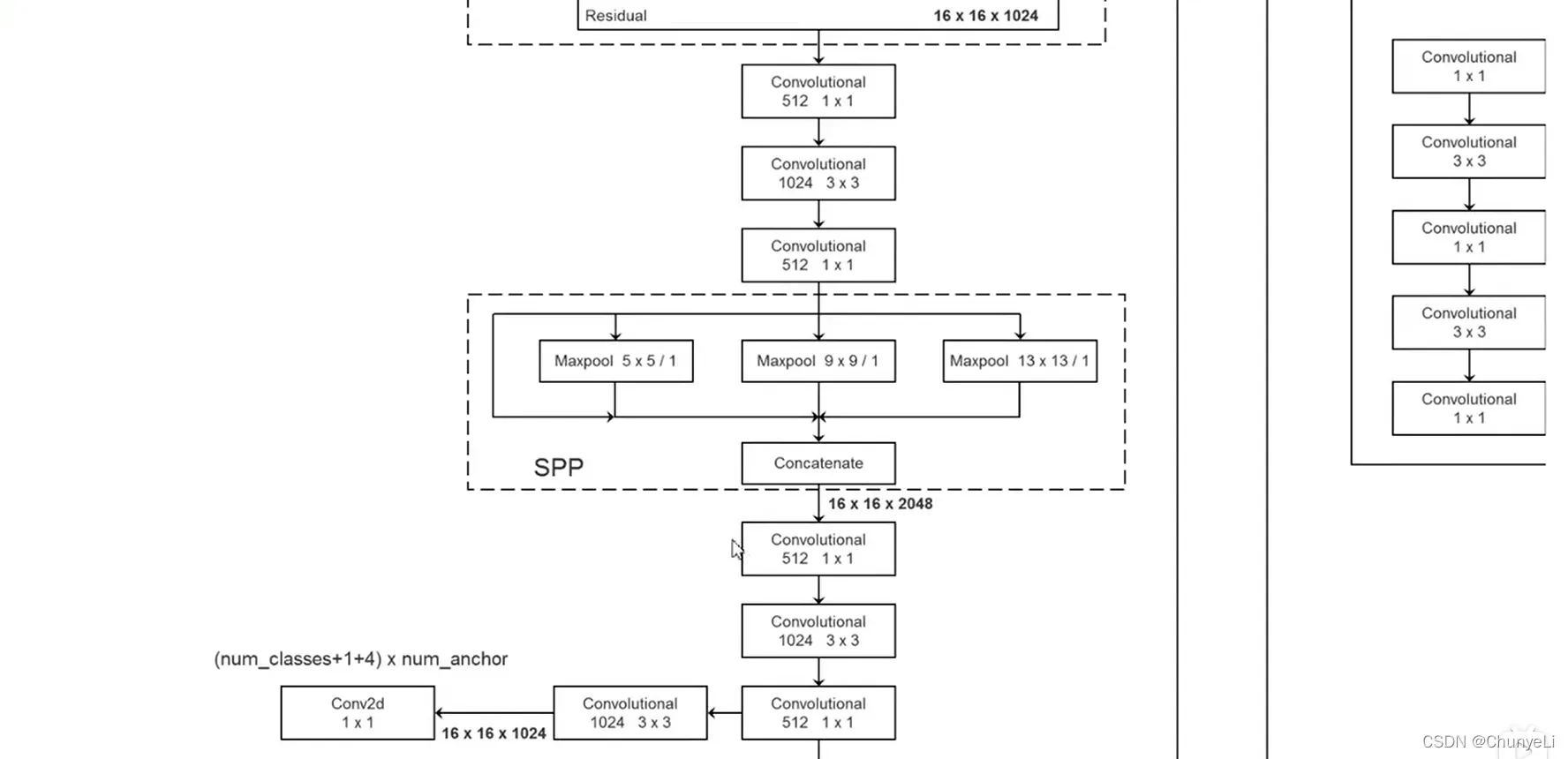
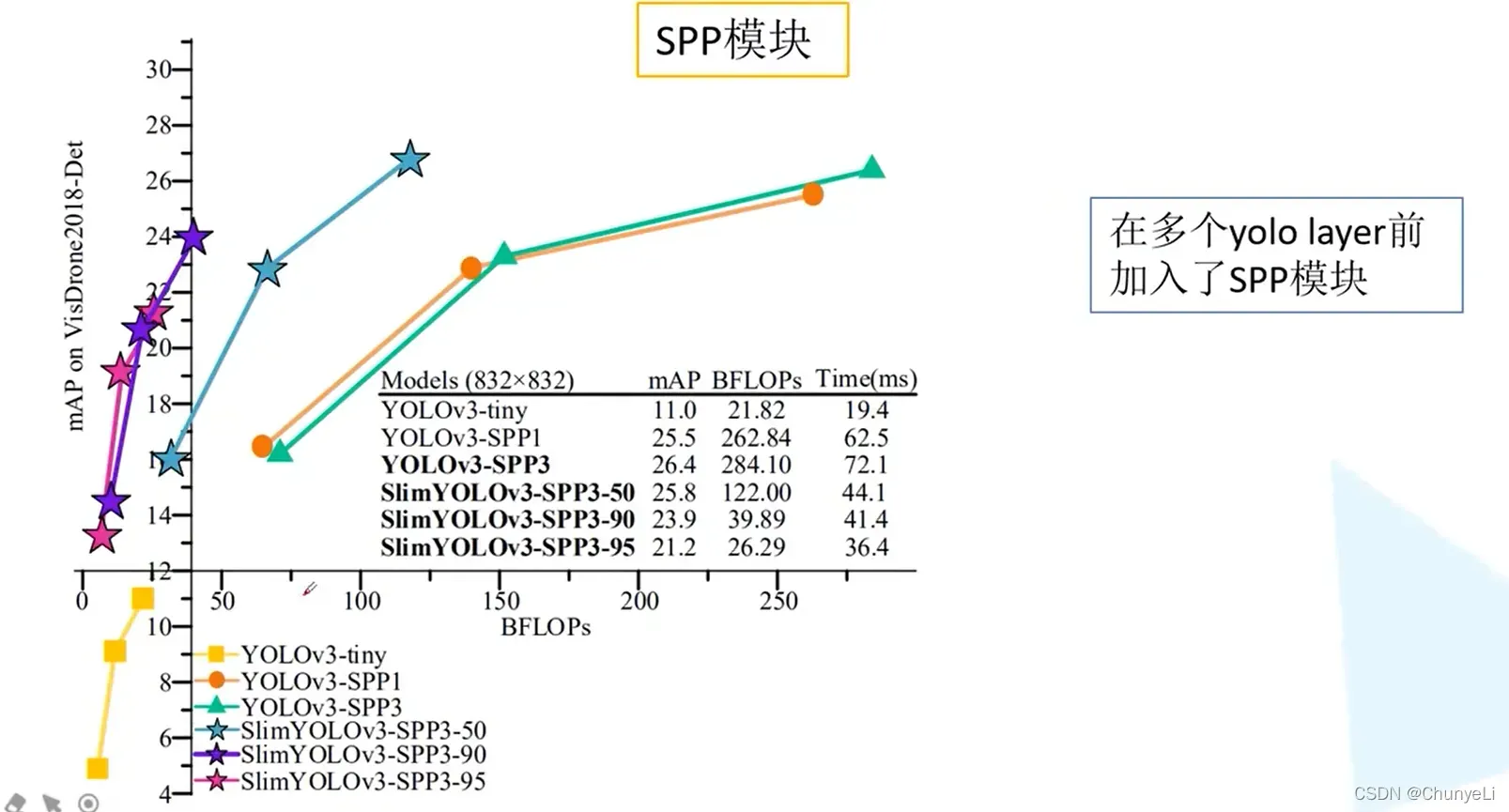
yolov3 spp (包括CIoU 和Focal Loss)
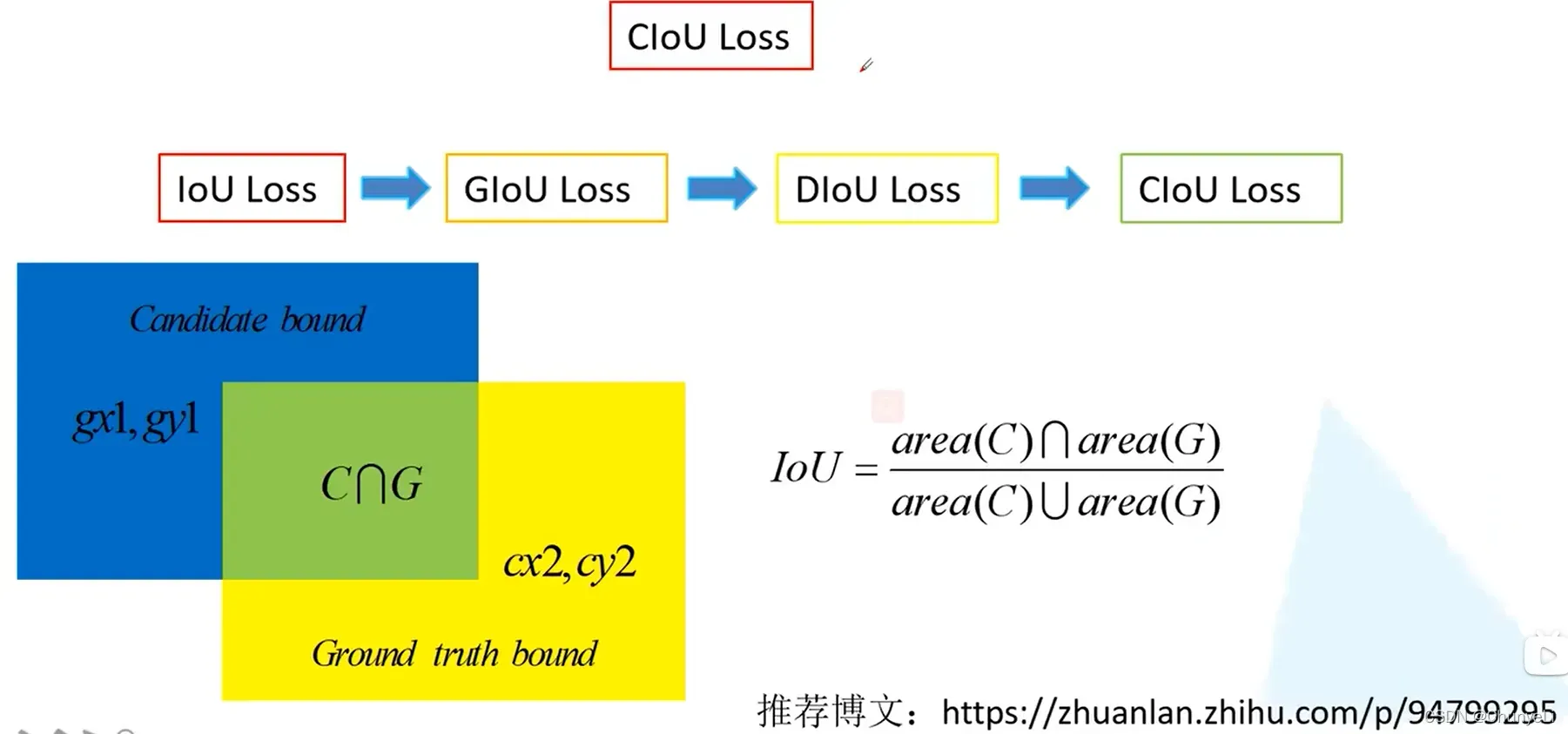
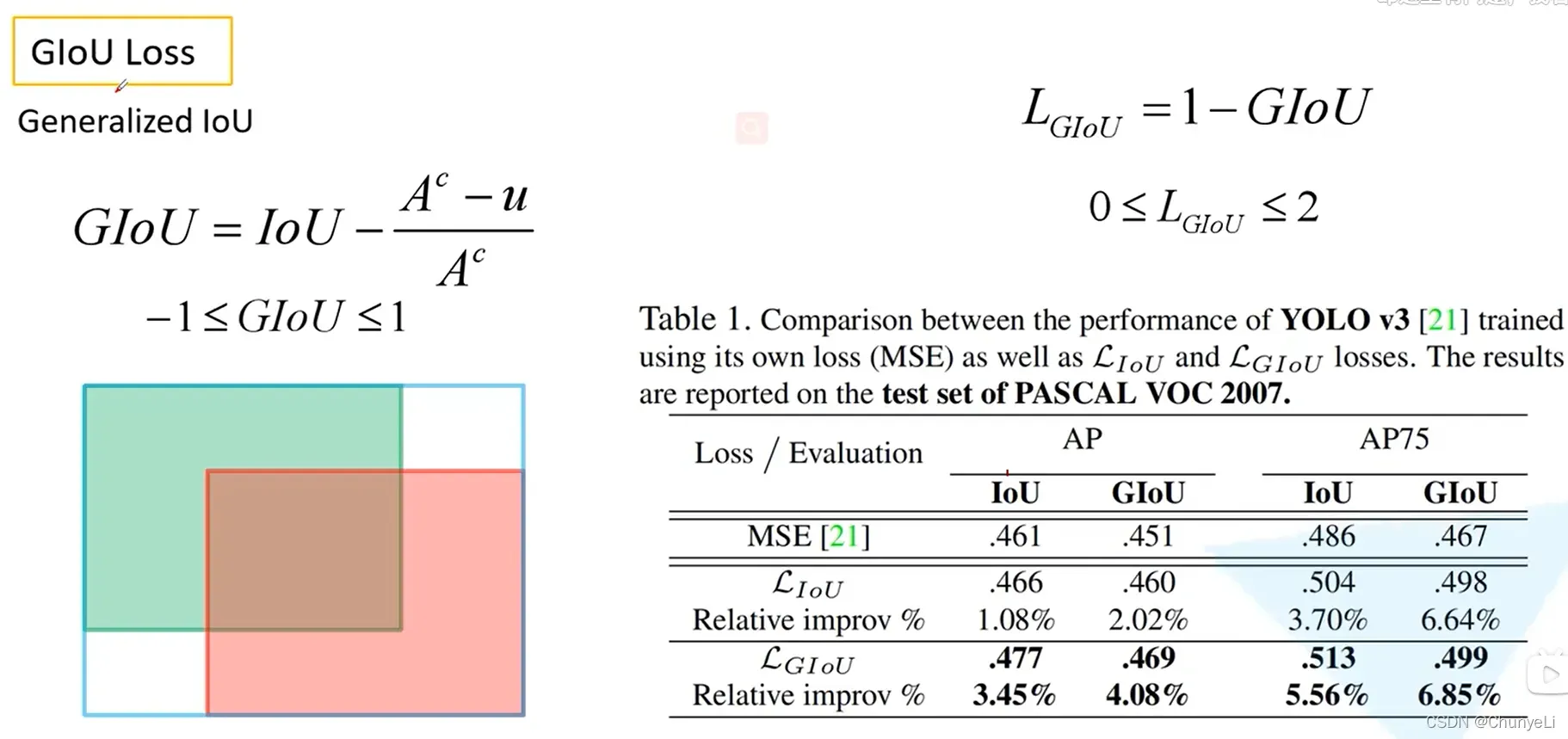
A^c是蓝色框,u是并集。GIoU在两者不相交时也可提供损失。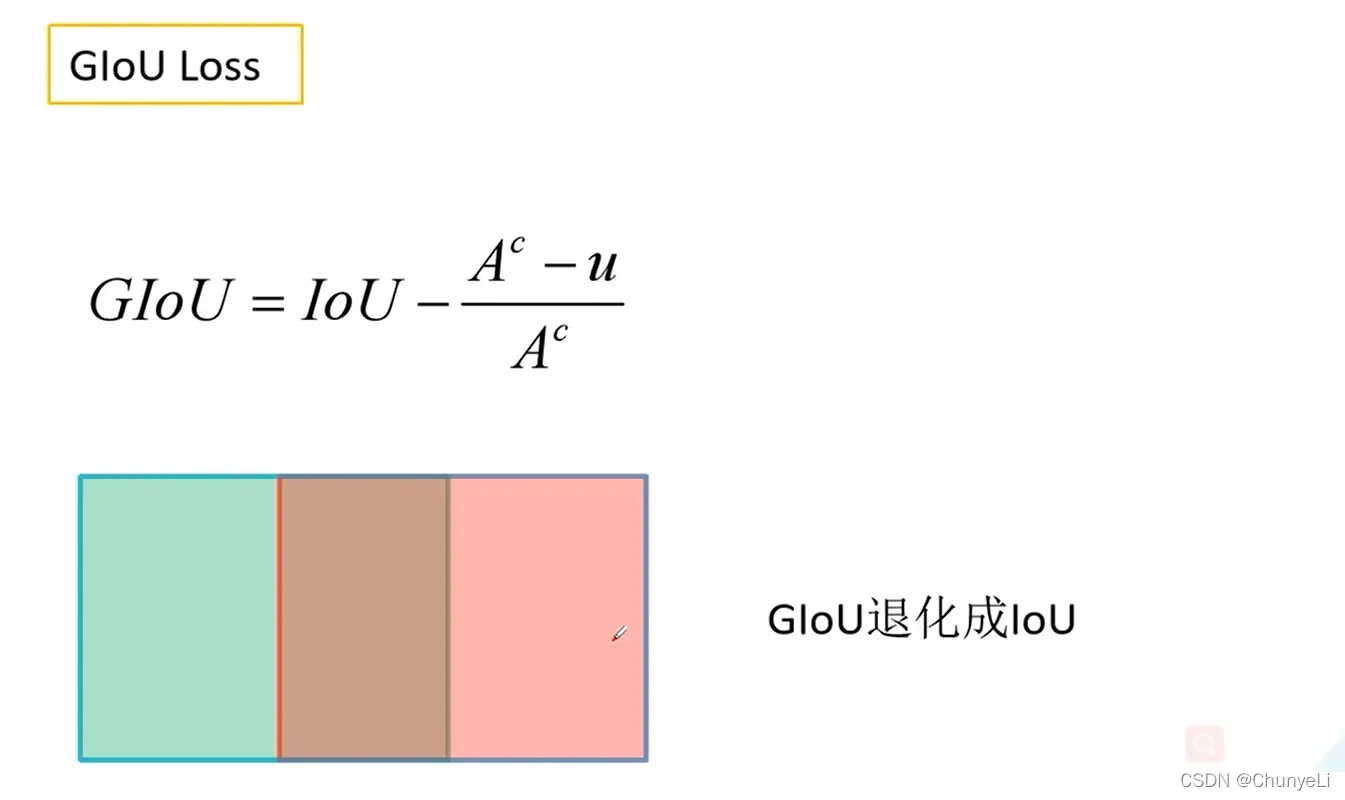
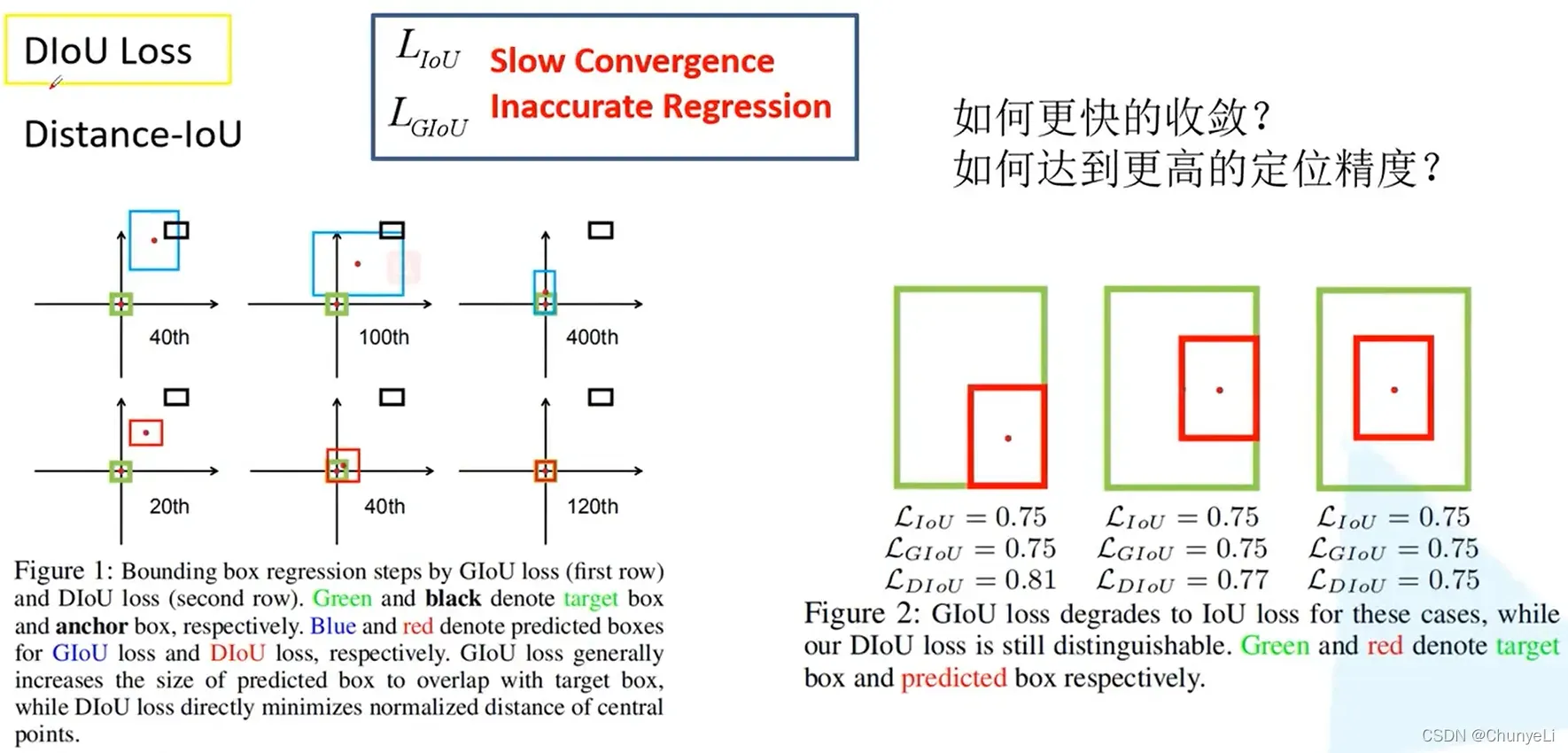
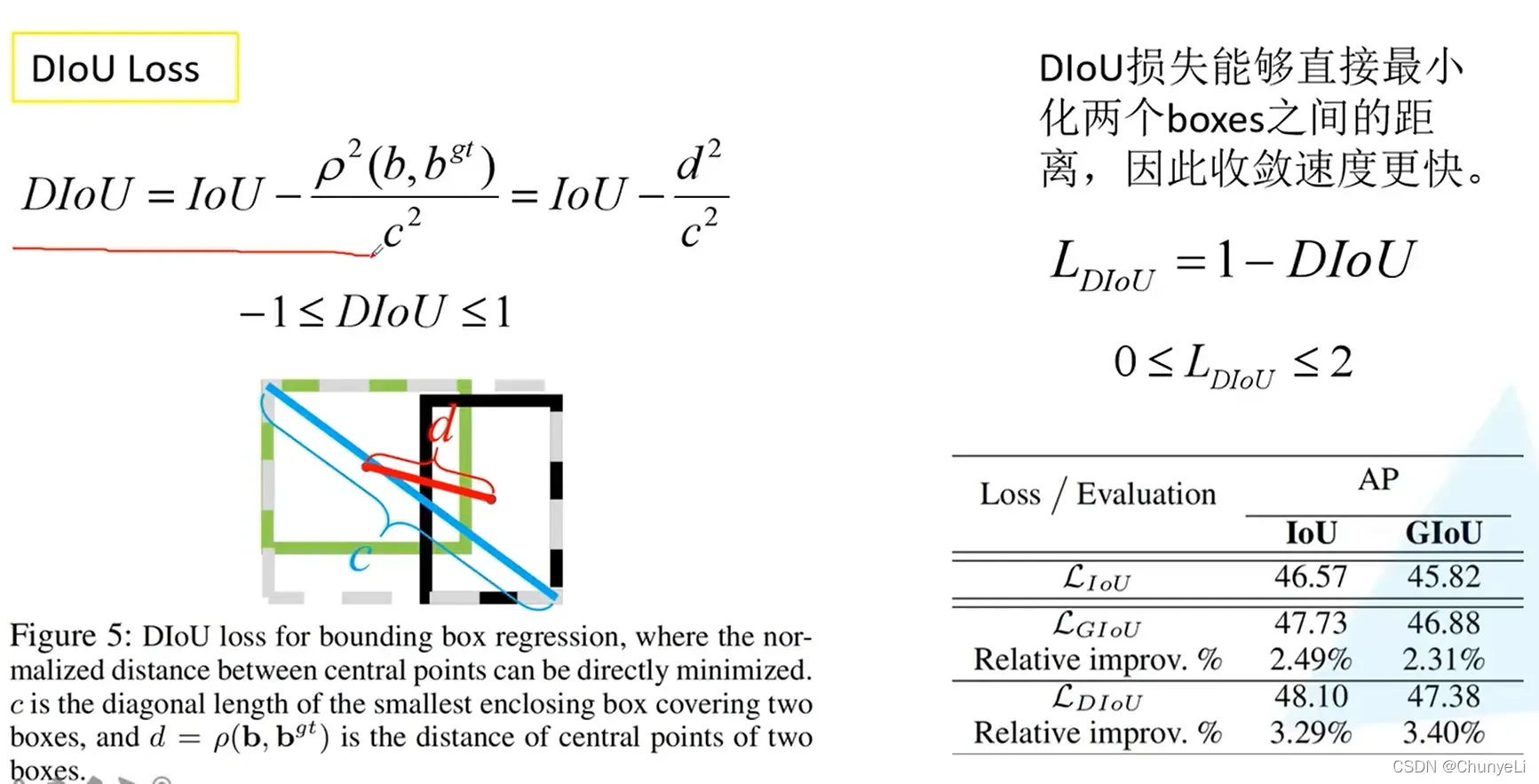
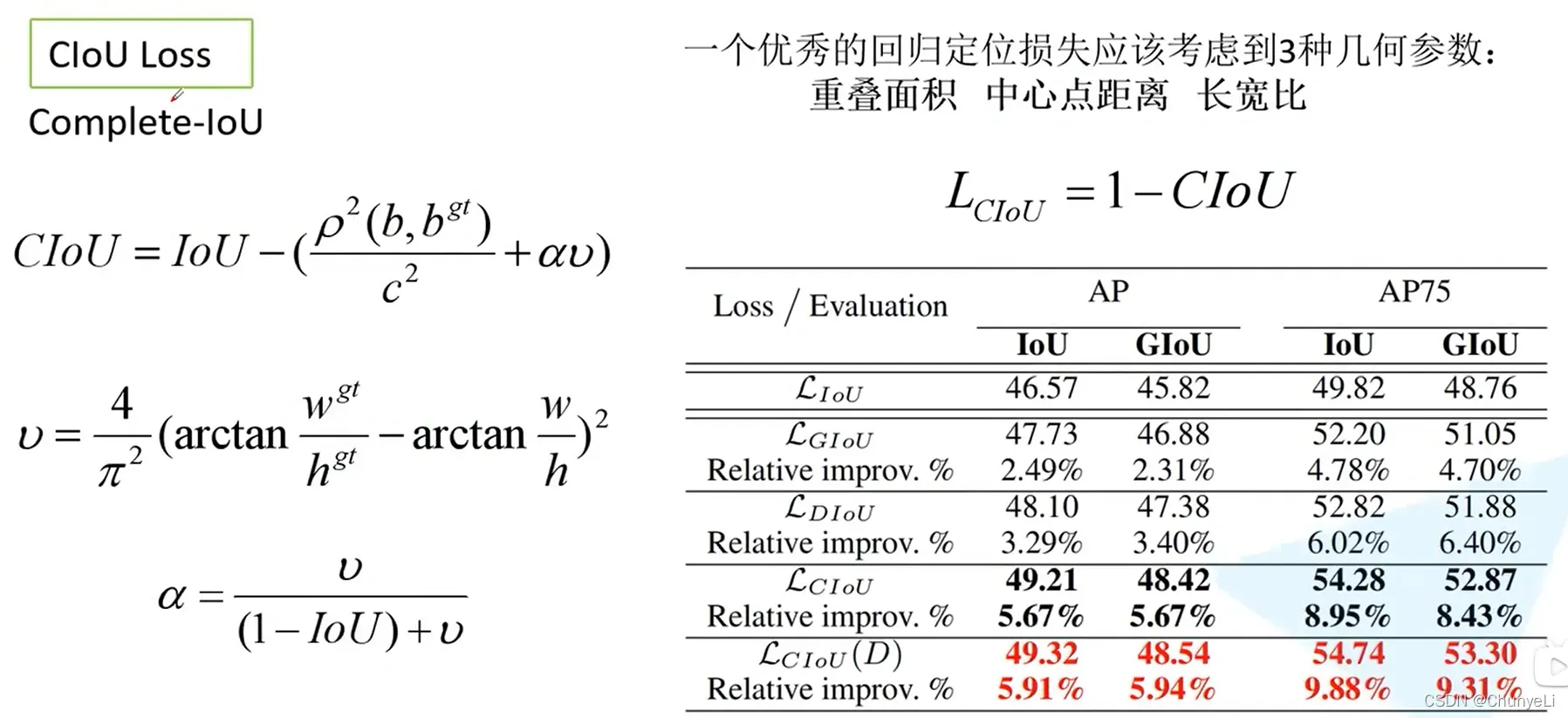
CIoU(D)是将C计算IoU时把其换成DIoU
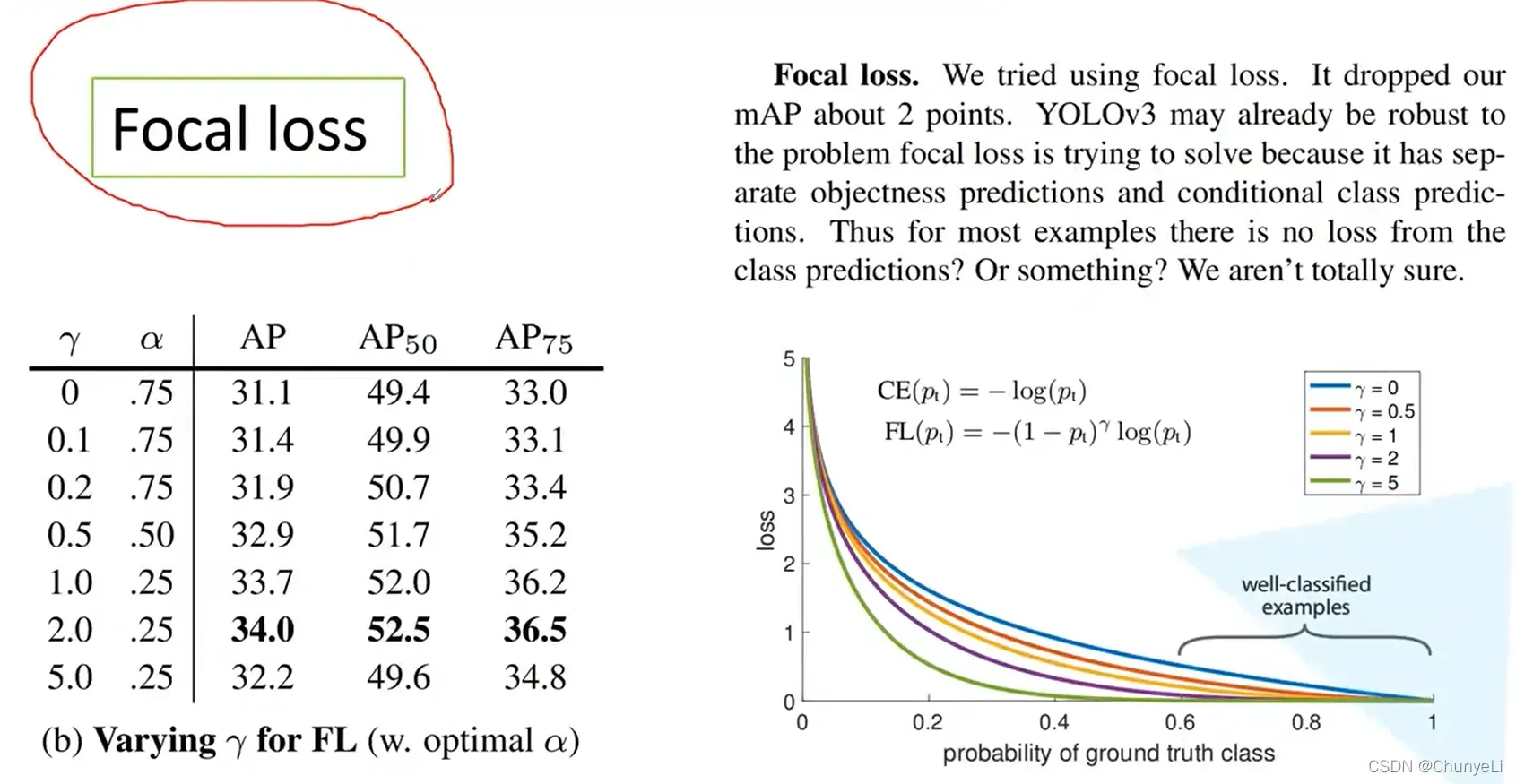
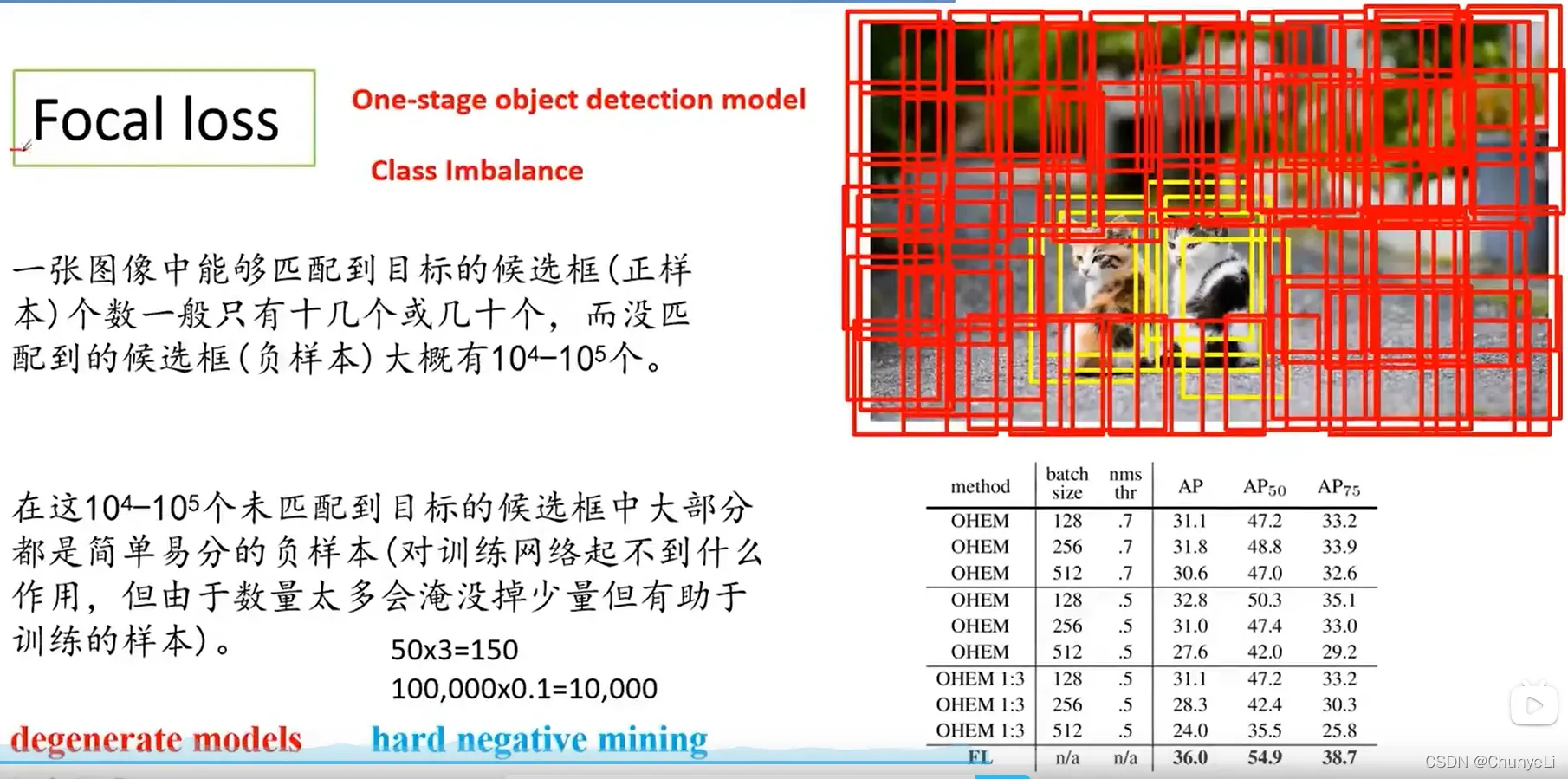
负样本挖掘没focal loss好。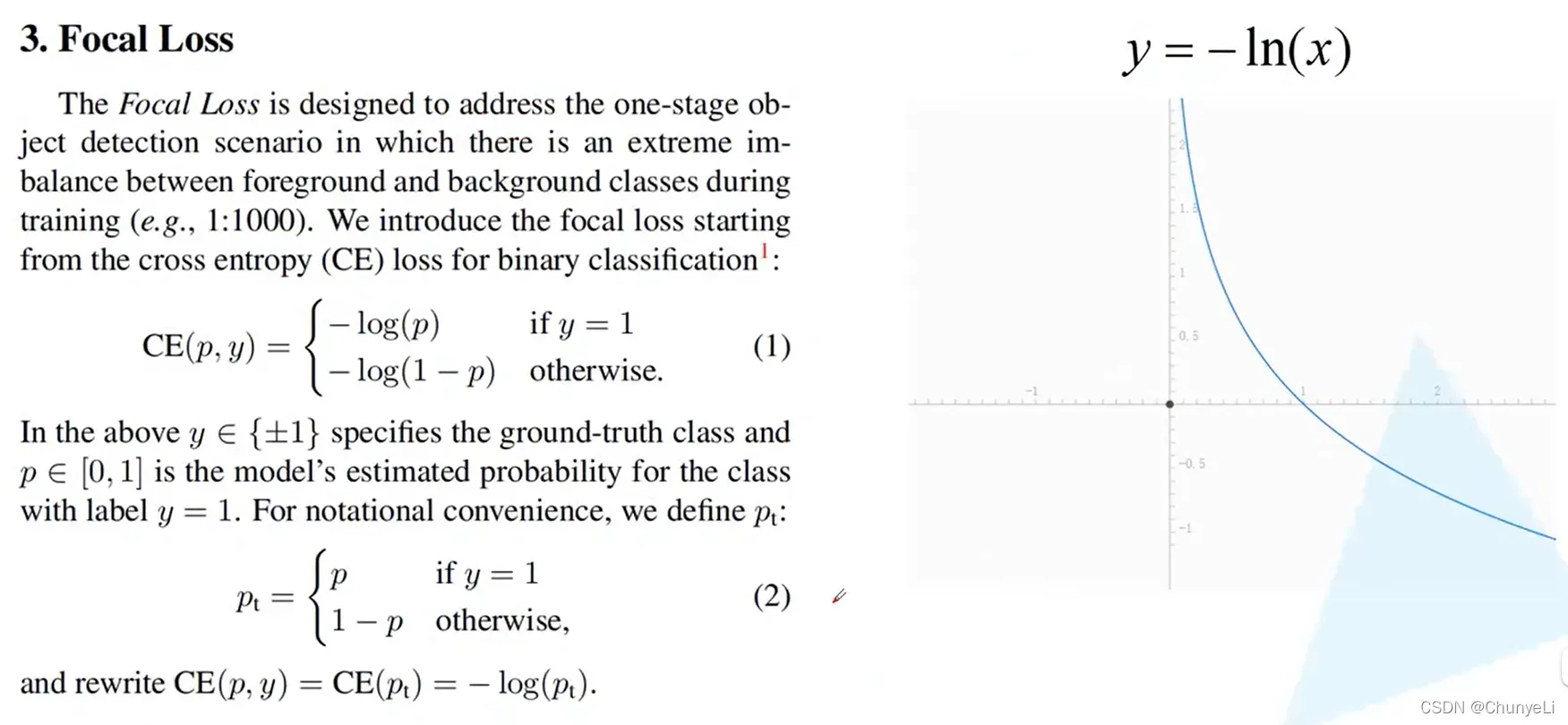
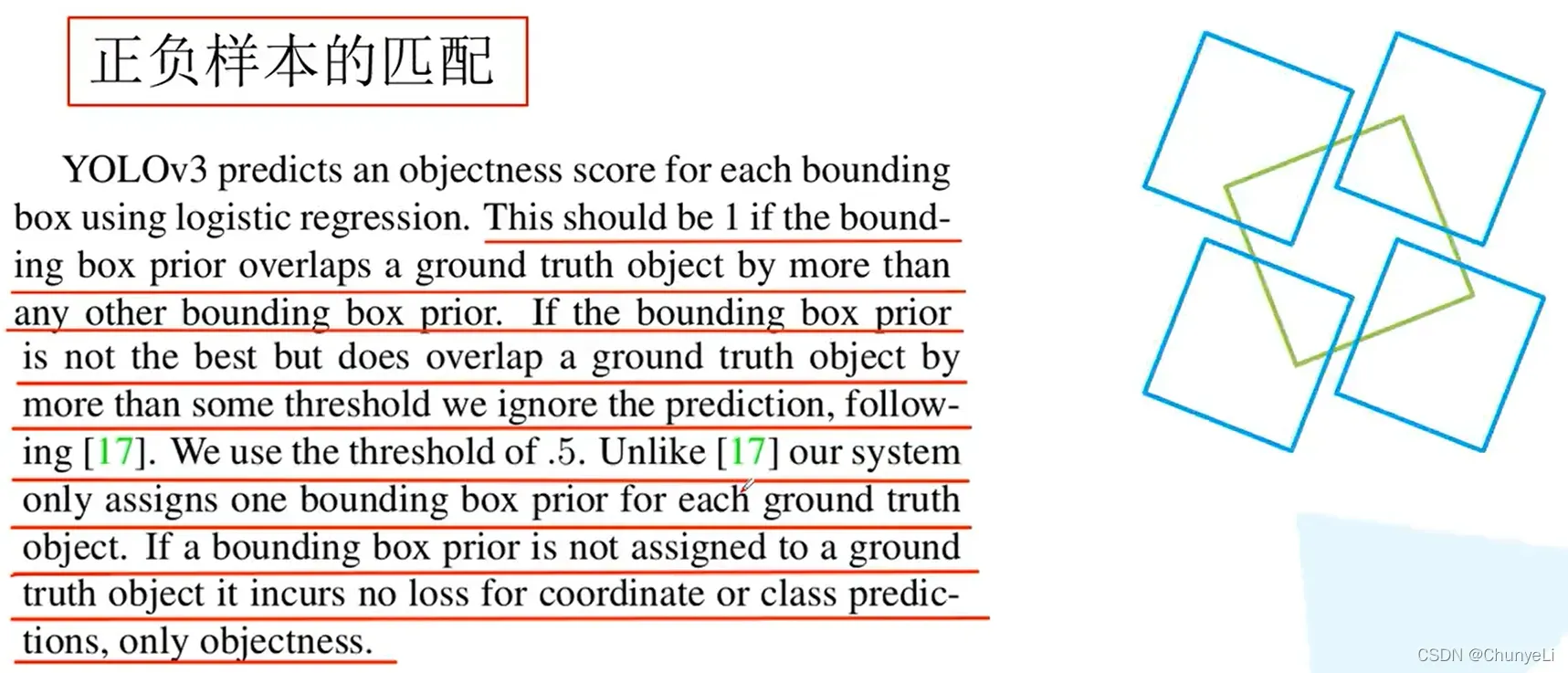
正样本和负样本。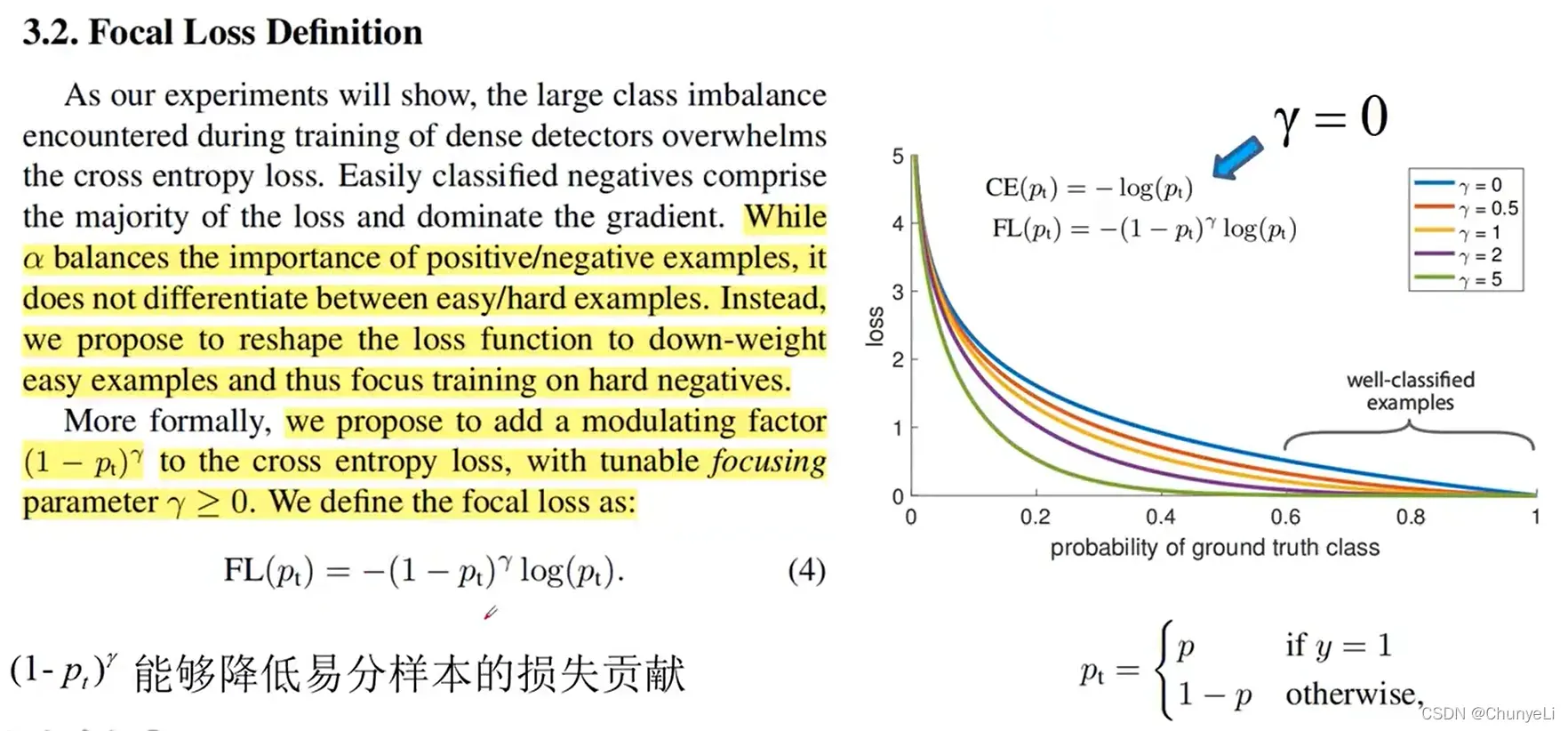
困难样本。
右侧曲线显示:
p_t越大,就表示越容易分类。这部分就降低其权重。
越小越难分类,这部分权重增加。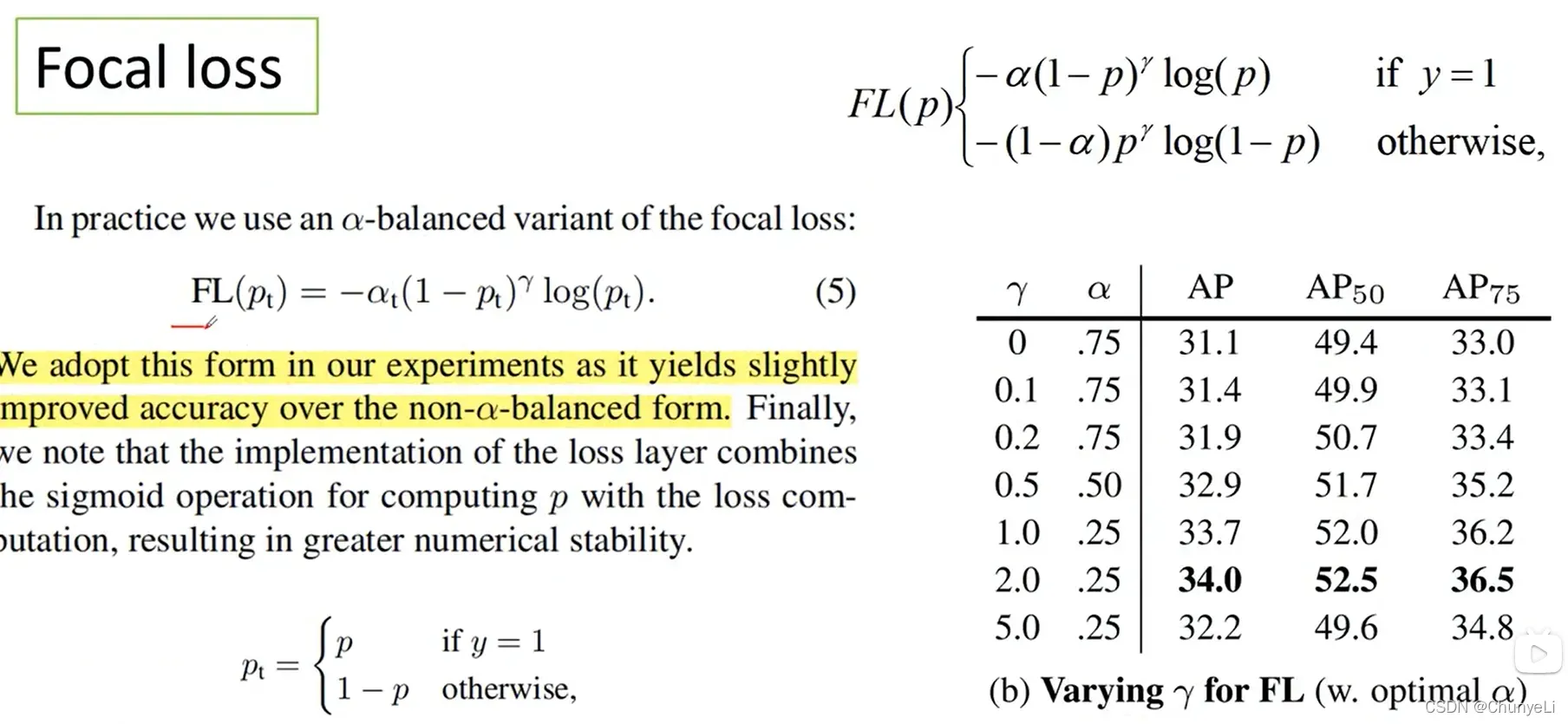
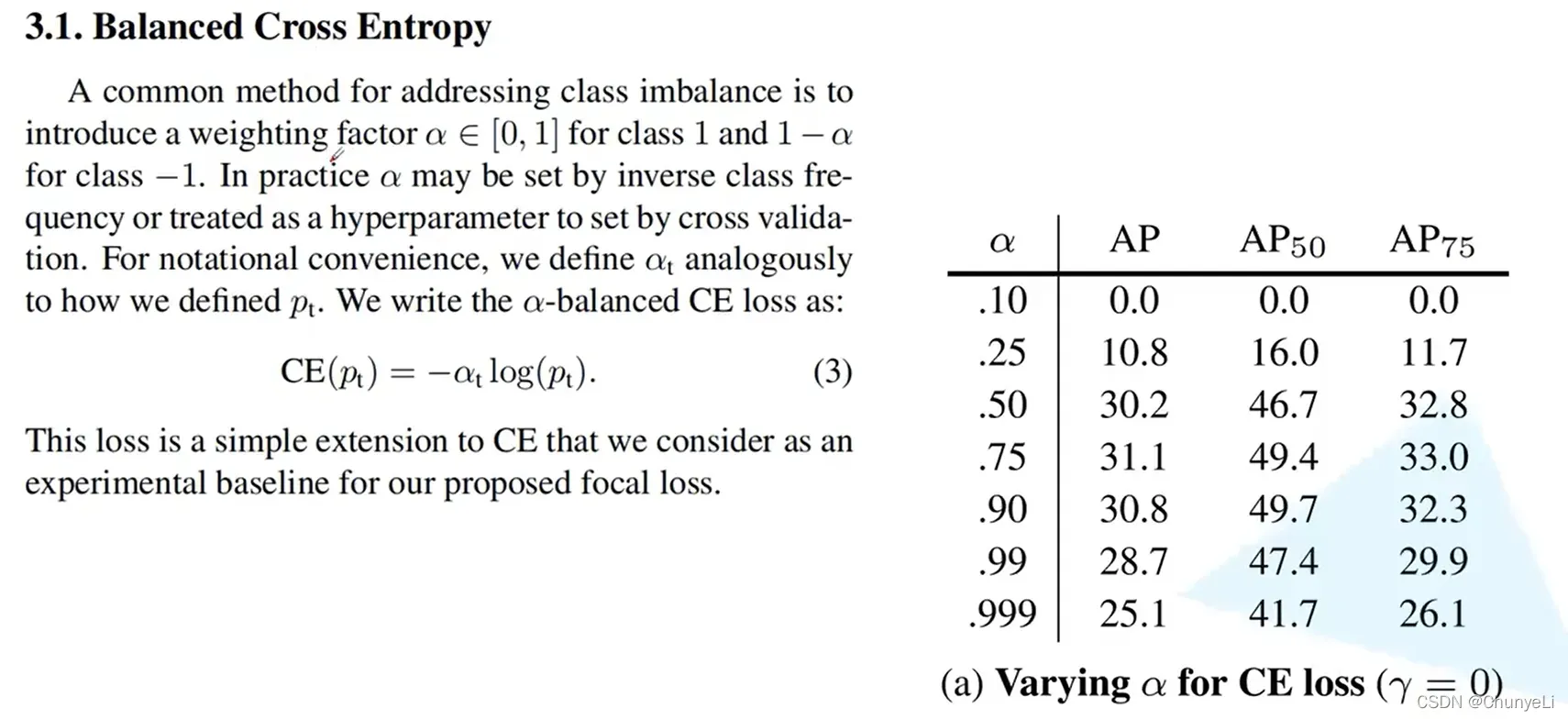
这里用α来平衡γ(平衡套娃)。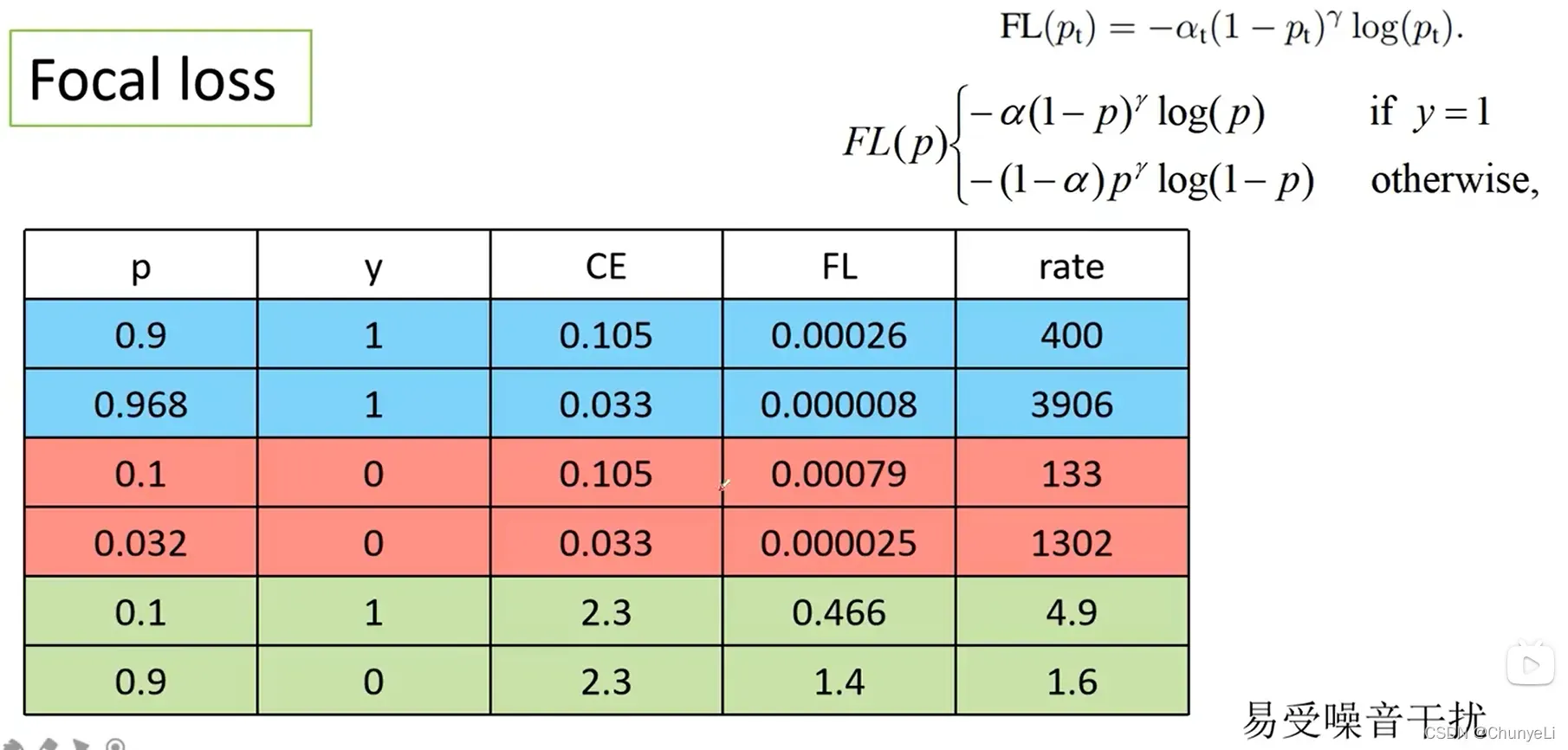
前两个是容易分离的样品,所以最好减轻重量。
前提:数据标注必须正确。
版权声明:本文为博主ChunyeLi原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/sinat_32512123/article/details/123166172