前言
基于TDOA(到达时间差)作为被广泛应用的声源定位算法之一,其核心即需要估计信号之间的时延,然后通过解方程组获取声源的位置。而广义互相关(Generalized Cross Correlation)是估计时延的常用算法之一,接下来总结一下该算法。
信号传播时延
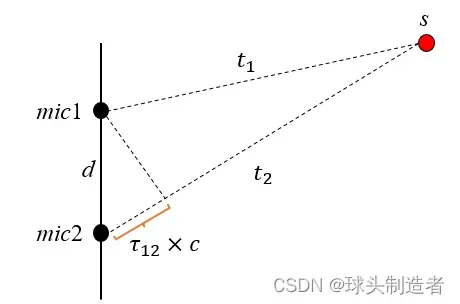
如上图所示,一声源经过时间
、
分别到达麦克风1和麦克风2,则两个麦克风接收的信号可以表示为:
即为信号到达两个麦克风之间的时延。
互相关算法
先来看一下互相关计算时延的模型:
将信号带入上述模型:
假设与
、
然后假设、
是互不相关的高斯白噪声,上式重新写为:
由互相关函数性质可知,当时,
取最大值,即两个麦克风之间的时延。
由此拓展至频域,互相关函数与互功率谱的关系可以表示为:
广义互相关-相位变换加权算法(Gcc-Phat)
由上述信号模型可知,在实际环境中不可避免的存在噪声甚至混响,导致互相关函数的峰值并不明显,算法性能急剧下降。因此考虑在频域内对互功率谱进行加权,从而能抑制噪声和混响的干扰。再通过逆傅里叶变换,得到互相关函数,模型如下:
即为频域加权函数。
最常用的加权函数为相位变换(Phase Transformation)加权,表达式如下:
该加权函数本质上相当于白化滤波,当噪声水平较高时作用明显。
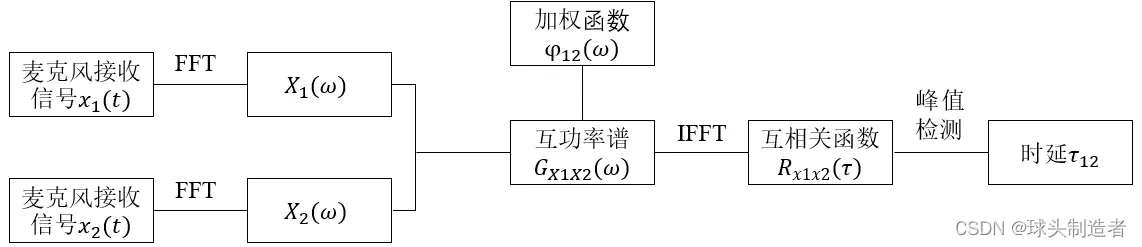
综上,Gcc-Phat算法估计信号时延的流程可总结为:
算法实现
MATLAB中有一个内置时延估计函数—gccphat,但是考虑到算法移植,还是需要手动实现。下面附上个人对该算法的实现代码,仅供参考。
% 傅里叶变换至频域
x1_fft = fft(x1);
x2_fft = fft(x2);
% 计算互功率谱
G = x1_fft.*conj(x2_fft);
% 相位变换加权
w = 1./(abs(G));
% 加权互功率谱
Gw = G.*w;
% 逆傅里叶变换得到互相关函数
R12 = ifft(Gw);
% 零频平移
R12_shift = ifftshift(R12);
% 找峰值
[~, idx] = max(abs(R12_shift));
% 计算时延(N为采样点,fs为采样频率)
sIndex = -N/2 : N/2-1;
delay = -sIndex(idx)/fs;然后与MATLAB的gccphat函数进行对比验证。
fs = 16384;
N = 1024;
x1 = randn(N,1);
tau = 0.003;
x2 = delayseq(x1,tau,fs);
%----------内置函数
gccphat(x2,x1,fs);
<< 0.003
%----------上述实现代码
GccPhat(x1,x2,fs,N);
<< 0.003
内置函数与个人实现的算法估计的时延均与理论值一致,验证通过!
结语
常用的加权函数还有另外几种,如ML加权等,不同的加权适用于不同的条件,感兴趣的可以继续深入了解,也欢迎与我私信交流。
总结不易,点个赞吧!😊
文章出处登录后可见!