ROS 安装详细教程 —— Ubuntu22.0.4 LTS 安装
ROS 简介
官方文档对 ROS 的介绍如下:
The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. And it’s all open source.
简单来说 ROS 就是一款开源的机器人操作系统,可以实现在 Linux 或 Dock 下安装并进行使用。这里我们选择在 Ubuntu 22.04LTS 下进行安装。
版本选择
ROS 目前主要支持 Linux 和 MacOS 系统,新发布的 ROS2 也支持 Windows 和 RTOS 系统。
对 ROS 兼容性最好的当属 Ubuntu 系统。从 ROS 发布以来,每版的 Ubuntu 系统版本都有与之对应 ROS 版本的,每一版 ROS 都有其对应版本的 Ubuntu 版本,切记不可随便装。
ROS 和 Ubuntu 之间的版本对应关系如下:
| Ubuntu | ROS 1.0 | ROS 2.0 |
|---|---|---|
| 16.04 LTS | Kinetic LTS | Ardent |
| 18.04 LTS | Melodic LTS | Dashing LTS |
| 20.04 LTS | Noetic LTS | Foxy LTS |
| 22.04 LTS | Noetic Ninjemys | Humble Hawksbill |
这里我们使用的是 Ubuntu 22.04 LTS 系统,所以这里我们选择 Humble Hawksbill 系统进行安装
安装过程
设置编码
安装代码如下:
sudo apt update
sudo apt install locales
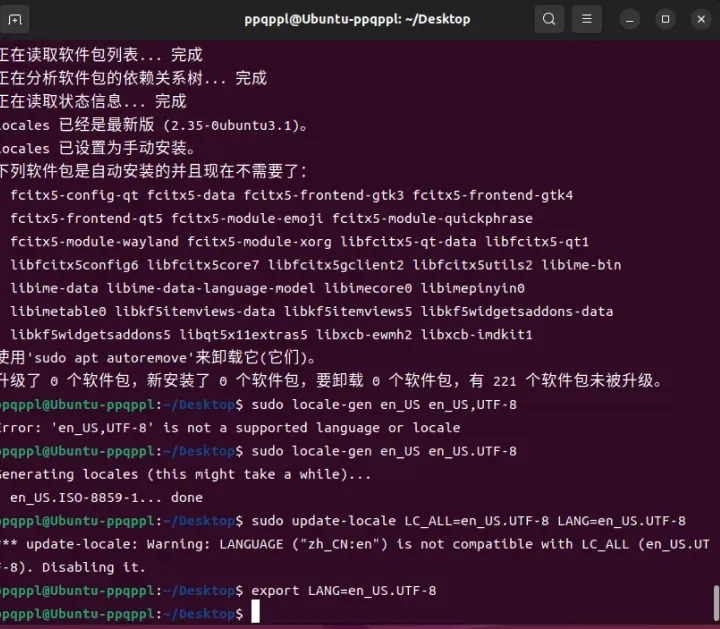
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8只有我们设置为 UTF-8 的英文编码才能正常安装运行于显示,设置后显示如下:
添加镜像源
## 通过检查此命令的输出,确保已启用Ubuntu Universe存储库。
apt-cache policy | grep universe输出应如下:
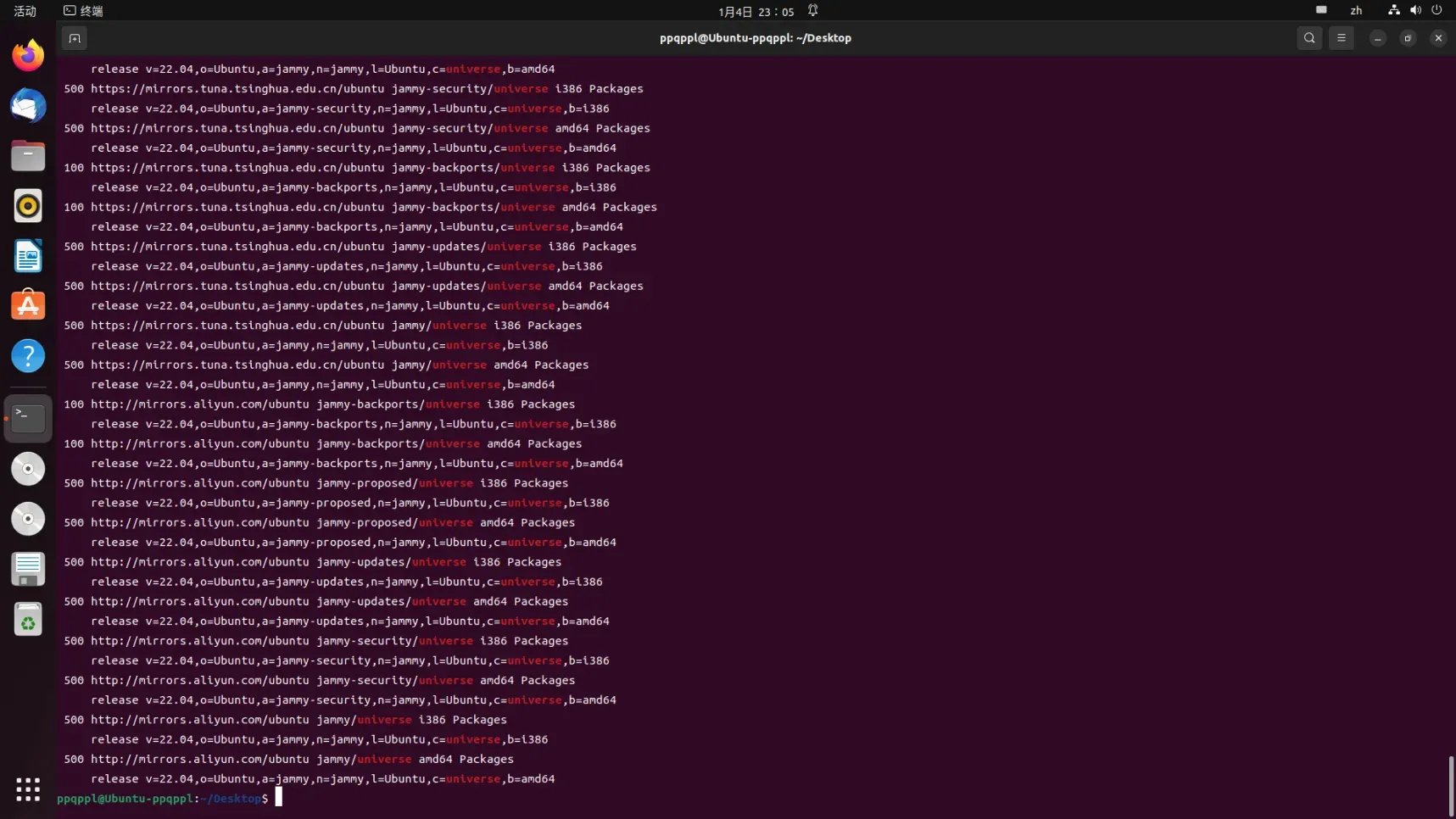
若没有看到像上面这样的输出行,依次执行如下命令:
sudo apt install software-properties-common
sudo add-apt-repository universe这里的命令就是添加 apt 软件源,这里会基本添加好所有的国内的 apt 软件源
然后继续执行上面的命令即可,在全部命令执行成功后,执行如下命令:
## 继续执行如下命令:
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null这里如果出现如下界面:
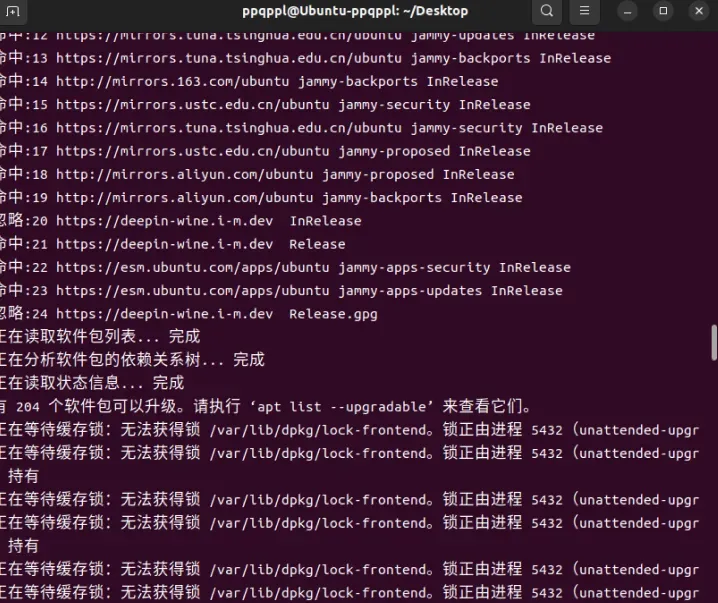
就需要执行如下命令:
sudo rm /var/chche/apt/archives/lock
sudo rm /var/lib/dpkg/lock-frontend #注意自己无法获得锁的路径
sudo apt install -y gcc nasm如果报错:ubuntu curl: (56) Recv failure: 连接被对方重设,说明已有程序占用该端口,我们直接重启即可
我们把所有的环境准备做好,就可以开始安装 ROS2 了
安装 ROS2
sudo apt update
sudo apt upgrade
## 推荐桌面版,比较推荐。
sudo apt install ros-humble-desktop
## 安装时间可能较长,安心等待。在我们安装好之后,需要设置以下环境变量:
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc到此,我们已经完整安装了 ROS2 ,我们就可以直接使用了
示例测试
示例一:通信测试
首先我们来测试以下 ROS2 最为重要的底层通信系统 DDS 是否正常,我们启动一个终端并通过命令新建一个数据的发布者节点:
ros2 run demo_nodes_cpp talker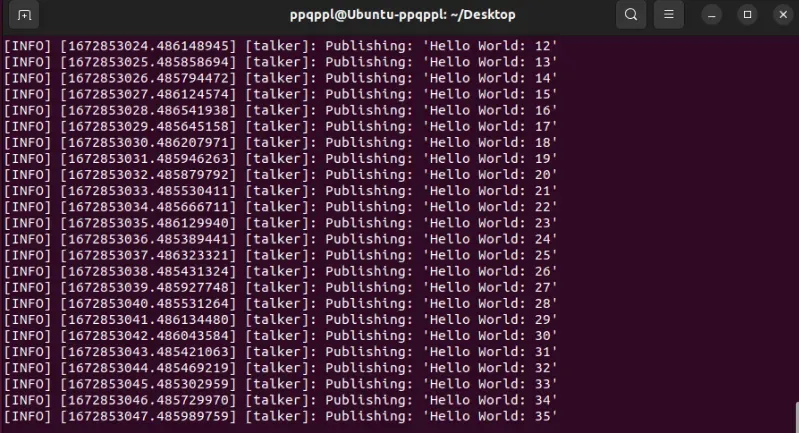
接下来,在这个终端不关闭进程的情况下,打开第二个终端,通过以下命令启动一个数据的订阅者节点:
ros2 run demo_nodes_py listener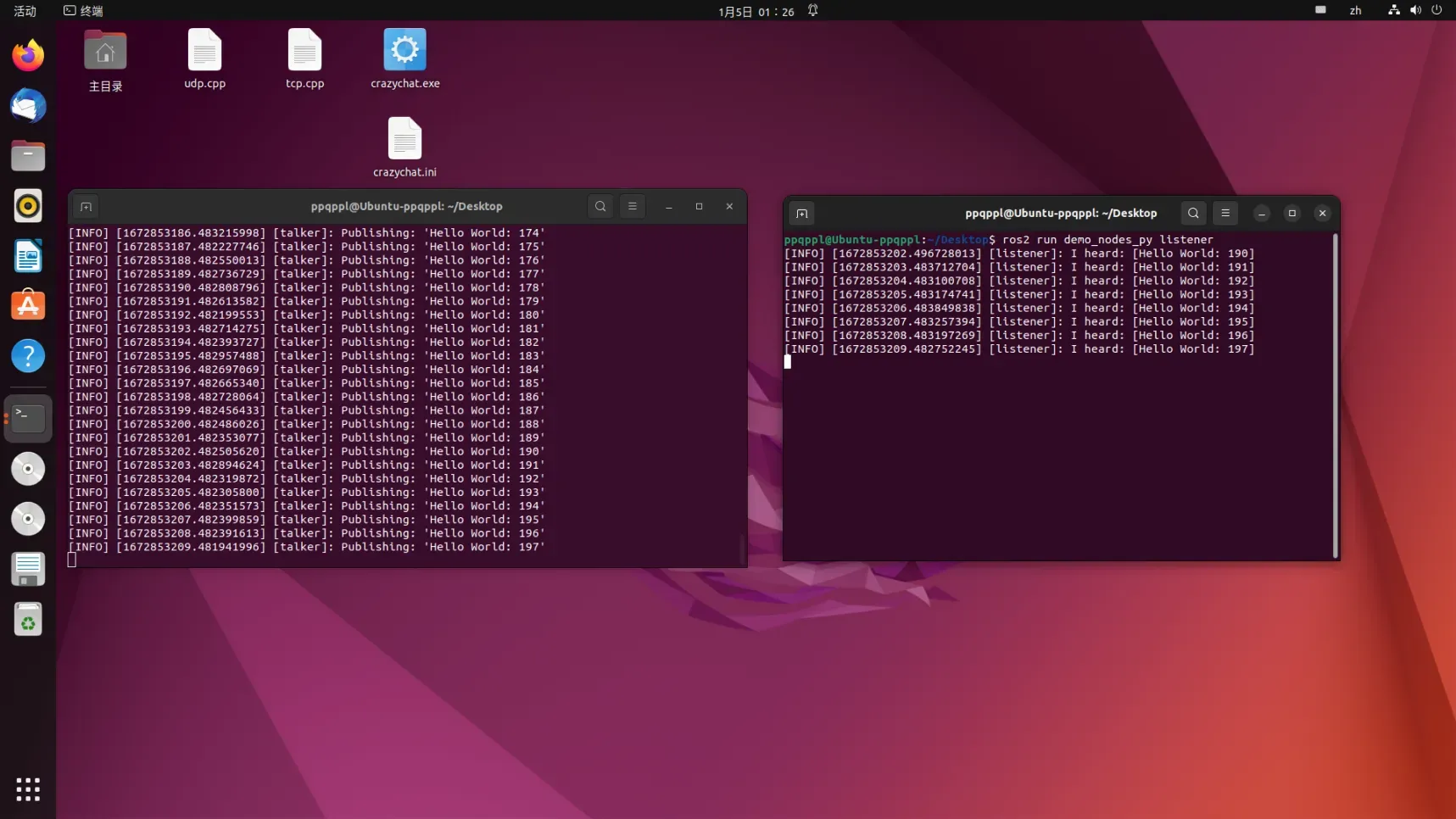
这里可以看出来,我们的 Hello World 字符串在两个终端中正常传输,说明通信系统没有问题
示例二:小海龟仿真测试
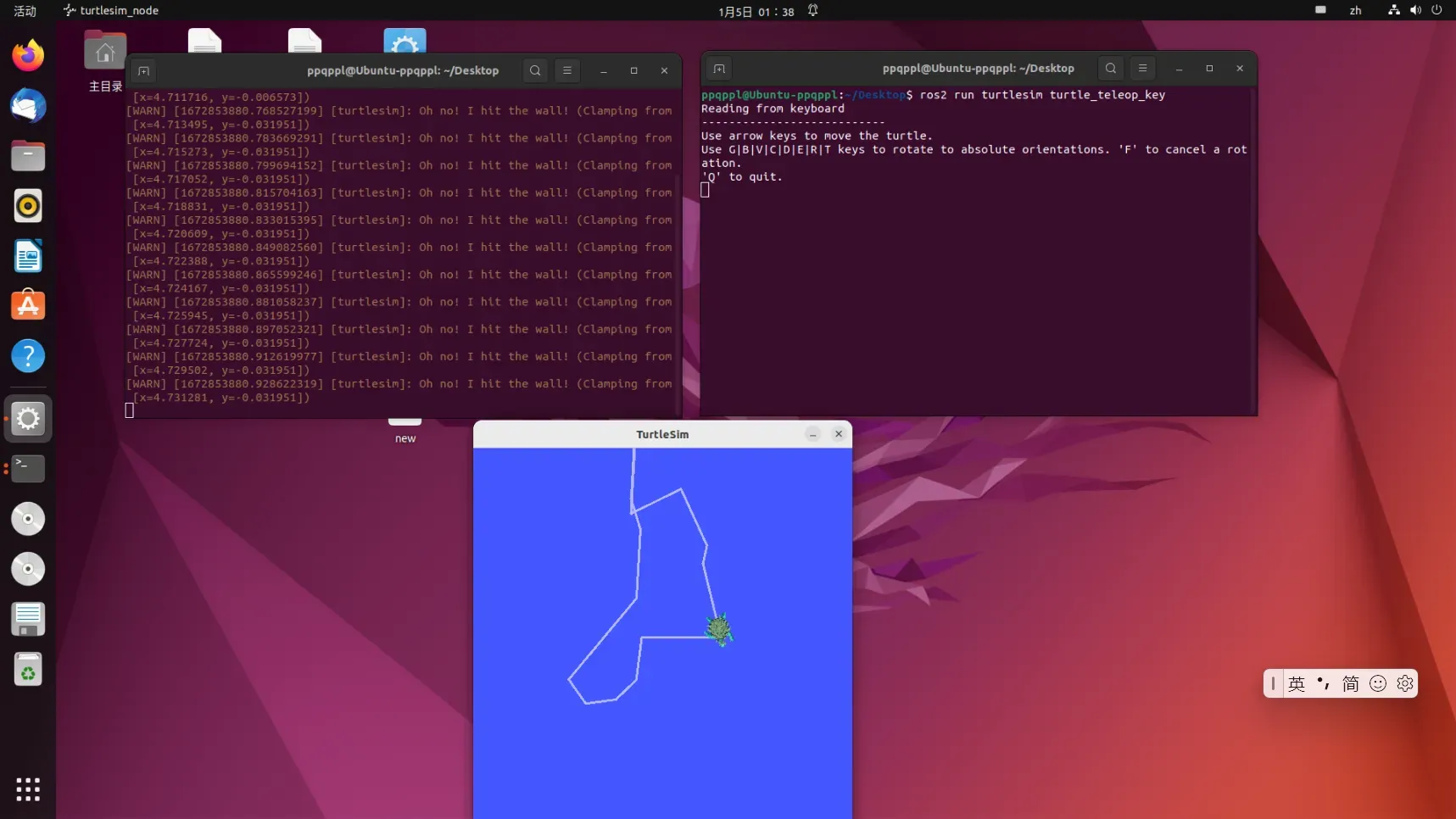
这里我们需要用到两个终端,分别使用如下命令:
# 终端一
ros2 run turtlesim turtlesim_node
# 终端二
ros2 run turtlesim turtle_teleop_key第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点,在该终端中点击键盘上的“上下左右”按键,就可以控制小海龟运动了
参考资料
- ubuntu22.04安装ROS2 详细教程
版权声明:本文为博主作者:ppqppl原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/m0_59161987/article/details/128557068