文章目录
- 一、声明
- 二、简介
- 三、代码
-
- C++代码
- Python代码
一、声明
- 本帖持续更新中
- 如有纰漏望指正!
二、简介
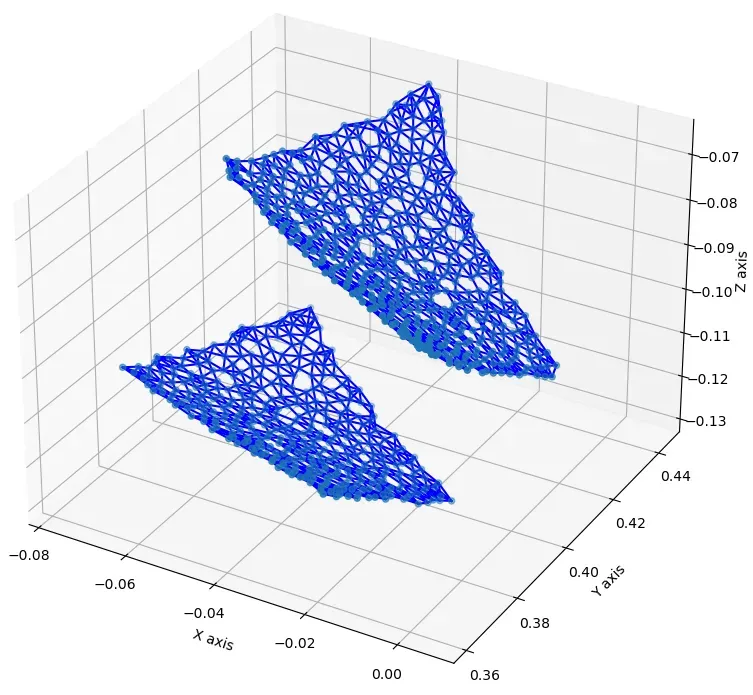
| (a)点云建立的k近邻图 | (b)k近邻图上建立的最小生成树 |
|---|---|
 |
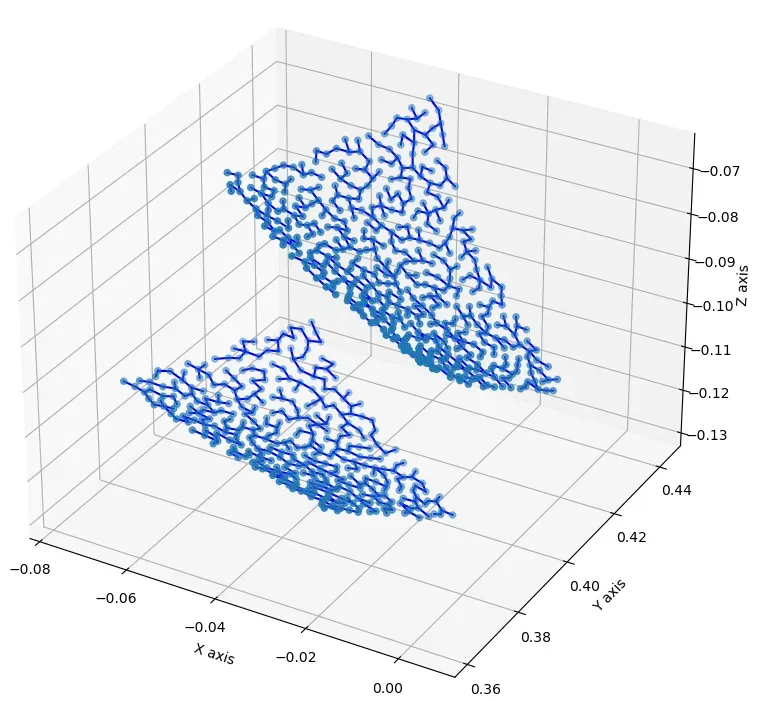 |
最小生成树 (Minimum Spanning Tree,简称 MST) 是一种在带权无向图中的树,它连接了图中所有节点并且总权重最小。在最小生成树中,任意两个节点之间有且仅有一条路径,同时这些路径的权重之和最小。
最小生成树的应用场景非常广泛。以下是一些常见的应用场景:
- 网络设计:在计算机网络或通信网络中,最小生成树可以用来构建最优的网络拓扑结构,以便实现高效的数据传输和通信。
- 物流规划:在物流管理中,最小生成树可以用来确定最短路径,从而有效地规划货物的运输路线,降低物流成本。
- 电力传输:在电力系统中,最小生成树可以用于确定电力输电线路的布置,确保电力从发电站到各个用户点的传输成本最小。
- 集群分析:在数据挖掘和机器学习中,最小生成树可以用于聚类分析,帮助发现数据点之间的相关性和相似性。
- 电路板设计:在电路板设计中,最小生成树可以用来确定电路中的连接线路,以便最小化电路板的制造成本。
最小生成树算法有多种,其中最著名且常用的算法是普里姆算法(Prim’s algorithm)和克鲁斯卡尔算法(Kruskal’s algorithm),它们可以高效地找到最小生成树。
三、代码
C++代码
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/kruskal_min_spanning_tree.hpp>
#include <iostream>
#include <vector>
int main() {
// Define the graph using adjacency_list
typedef boost::adjacency_list<boost::vecS, boost::vecS, boost::undirectedS,
boost::no_property, boost::property<boost::edge_weight_t, int>> Graph;
typedef boost::graph_traits<Graph>::edge_descriptor Edge;
typedef boost::property_map<Graph, boost::edge_weight_t>::type WeightMap;
// Create a graph object
Graph g;
// Add edges to the graph
add_edge(0, 1, 2, g);
add_edge(1, 2, 3, g);
add_edge(0, 3, 1, g);
// ... Add other edges as needed
// Vector to store the resulting MST edges
std::vector<Edge> spanning_tree;
// Compute the minimum spanning tree using Kruskal's algorithm
boost::kruskal_minimum_spanning_tree(g, std::back_inserter(spanning_tree));
// Print the edges in the MST
for (std::vector<Edge>::iterator ei = spanning_tree.begin(); ei != spanning_tree.end(); ++ei) {
std::cout << source(*ei, g) << " <--> " << target(*ei, g)
<< " with weight of " << get(boost::edge_weight, g, *ei) << std::endl;
}
return 0;
}
Python代码
import open3d as o3d
import numpy as np
import networkx as nx
from scipy.spatial import KDTree
def create_knn_graph(point_cloud, k):
# Convert Open3D point cloud to numpy array
points = np.asarray(point_cloud.points)
# Build a KDTree for efficient nearest neighbor search
tree = KDTree(points)
# Create a graph
G = nx.Graph()
# Add nodes
for i in range(len(points)):
G.add_node(i, pos=points[i])
# Add edges based on k nearest neighbors
for i in range(len(points)):
distances, indices = tree.query(points[i], k=k+1) # k+1 because the point itself is included
for j in range(1, k+1): # Skip the first one (itself)
G.add_edge(i, indices[j], weight=distances[j])
return G
def find_mst(graph):
# Compute the minimum spanning tree
return nx.minimum_spanning_tree(graph)
# Load point cloud
pcd = o3d.io.read_point_cloud("path_to_your_point_cloud_file.ply") # Adjust the file path
# Create the kNN graph (choose your k)
k = 5 # For example, k=5
knn_graph = create_knn_graph(pcd, k)
# Find the minimum spanning tree
mst = find_mst(knn_graph)
# Optional: Plot the MST
pos = nx.get_node_attributes(mst, 'pos')
nx.draw(mst, pos, with_labels=True, node_size=20, font_size=8)
版权声明:本文为博主作者:坚果仙人原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/i13270752870/article/details/134394363