文章目录
一、FFT与IFFT
1. FFT
定义:
傅里叶变换是一种线性积分变换,用于信号在时域和频域之间的变换。而为什么要把信号从时域转换到频域?因为很多信号在时域中的组成及操作是十分复杂的,但是转换到频域之后就会变得十分简单,如:时域相乘就是频域上的相加。
公式:
个人理解:
傅里叶变化主要利用了标准正交基的概念,将时域信号与一个频域分量进行内积(也就是积分),这样可以将时域信号中带有ω的分量提取出来,不带有ω的分量就会被过滤。经过这一操作以后就能将频域上的信息保留下来。
2. IFFT
定义:
傅里叶变换是可逆的,傅里叶逆变换就是将信号从频域转换到时域上的操作。因为在现实生活中主要接触到的信号都是时域信号,因此需要在频域上对信号进行处理之后要转换成时域信号进行输出。
公式:
二、最小二乘法
定义:
最小二乘法通过最小化误差的平方和寻找数据的最佳函数,利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。
公式:

个人理解:
最小二乘法是利用已知参数去拟合出一个最优的线性函数,再利用这个函数方程去预测一个未知的目标值。而这个最优就体现在实际值与预测值的最小误差平方上
为什么是最小误差的平方而不是最小误差呢?
- 最小误差的平方是随时可导的,而最小误差不是,这在深度学习神经网络领域中有重大意义;
- 在矢量中,平方表示值的大小,取消了方向的定义,在最小二乘法中,方向没有什么作用;
- 平方可放大两两之间的误差,对于择优问题有提升精度的作用。
三、卷积
定义:
卷积就是矩阵上对应元素相乘,然后再把乘积加起来。
意义:
卷积是特征提取的一个过程。卷积核反映了特征规律,利用具有该特征规律的卷积核对目标矩阵进行卷积,就会放大目标矩阵中的这个特征,减小其他特征。
公式:
应用:
比较经典的卷积实用例子就是图像处理中的边缘检测和滤波。
- sobel边检算子就是利用了水平方向的卷积核与垂直方向的卷积核来保存图像中的垂直分量和水平分量,达到一个保存边缘信息的目的。
- 平滑滤波则是利用卷积核将原矩阵中的不同值尽量拉到同一值,高的值变低,低的值变高。使得原矩阵呈现出平滑的效果。
四、Z变换
定义:
Z变换(Z-transformation)是对离散序列进行的一种数学变换,常用于求线性时不变差分方程的解。它在离散系统中的地位如同拉普拉斯变换在连续系统中的地位。
公式:

Z变换收敛的充要条件是它满足绝对可和条件。
主要性质:
- Z变换X(z)的收敛域是z平面上以原点为中心的同心圆环;
- Z变换X(z)的收敛域内不能包含任何极点。
五、拉普拉斯变换
定义:
拉普拉斯变换是对连续时域序列转换到复频域上的一种数学变换。
公式:
意义:
为简化计算而建立在实变量函数和复变量函数间的一种函数变换。对一个实变量函数作拉普拉斯变换,并在复数域中作各种运算,再将运算结果作拉普拉斯反变换来求得实数域中的相应结果,往往比直接在实数域中求出同样的结果在计算上容易得多。
六、常用滤波算法
1. 中值滤波
定义:
中值滤波是一种非线性滤波方式,主要目的就是去除图像上的尖锐噪声,平滑图像。
原理:
以目标像素周围3 × 3的邻域为例,就是将3 × 3邻域中九个像素灰度值进行排序,将中间灰度值作为目标像素的灰度值。椒盐噪声影响的像素灰度值通常都非常大或者非常小,因此通过排序会被消除掉。
2. 均值滤波
定义:
均值滤波是一种线性滤波方式,用当前像素点周围 n × n 个像素值的均值来代替当前像素值。使用该方法遍历处理图像内的每一个像素点,可完成整幅图像的均值滤波。
原理:
同样以目标像素周围 3 × 3 的邻域为例,就是将 3 × 3 邻域中九个像素灰度值的平均值作为目标像素的灰度值。
3. 高斯滤波
定义:
高斯滤波就是将均值滤波中的平局值改为高斯加权平均值,邻域中年距离目标像素越远的像素灰度值权重越小,通常通过生成一个高斯模板实现,适用于消除高斯噪声。
特性:
- 核大小固定,sigma值越大,权值分布越平缓。因此邻域各点值对输出值的影响越大,最终结果造成图像越模糊;
- 核大小固定,sigma值越小,权值分布越突起。因此邻域各点值对输出值的影响越小,图像变化越小。假如中心点权值为1,其他点权值为0,最终结果是图像没有任何变化;
- sigma固定时,核越大图像越模糊;
- sigma固定时,核越小图像变化越小。
4. 卡尔曼滤波
定义:
严格来说,卡尔曼滤波不是一种滤除噪声的滤波算法,而是一种结合先验经验、测量更新的状态估计的算法,相当于一个状态估计算子。其基本思想是综合利用上一次的状态和测量值来对物理量的状态进行预测估计。
算法流程:
-
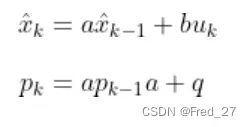
预测过程:
时间更新方程(即预测阶段)根据前一时刻的状态估计值推算当前时刻的状态变量先验估计值和误差协方差先验估计值。
-
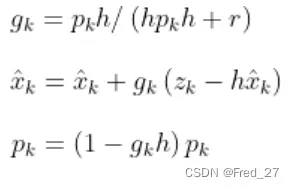
更新过程:
测量更新方程(即更新阶段)负责将先验估计和新的测量变量结合起来构造改进的后验估计。
版权声明:本文为博主作者:Fred_27原创文章,版权归属原作者,如果侵权,请联系我们删除!