
概要
永磁同步电机(PMSM)的矢量控制,可谓是入门级别的控制,简单来说就是通过某些手段得到定子当前所需电压,能够产生相应的转速等。
矢量控制便是控制逆变器输出相应电压是一种手段,其本质上是在于利用Clark变换与Park变换解耦电机电流的励磁分量与转矩分量,将三相定子电流解耦为 idi_{d} (主要控制励磁,也会影响转矩)与 iqi_{q} (控制转矩),对于表贴式永磁同步电机( Ld=LqL_{d}=L_{q} ),一般采用 id=0i_{d}=0 的控制手段,仅靠转子永磁体的固定励磁。
一、三相PMSM坐标变换
各坐标系之间的关系如下图1:

1.1 Clark变换
将自然坐标系ABC变换到静止坐标系 α−β\alpha-\beta 的坐标变换为Clark变换,根据图1所示各坐标系之间的关系,可以得到:

其中:f代表电机的电压、电流等变量; T3s/2sT_{3s/2s} 为坐标变换矩阵,可表示为:

将静止坐标系 α−β\alpha-\beta 的坐标变换到自然坐标系ABC的坐标变换称为反Clark变换,表示为:
![]()
其中T2s/3sT_{2s/3s} 为坐标变换矩阵,表示为:

1.2 Park变换
将静止坐标系 α−β\alpha-\beta 的坐标变换到同步旋转坐标系 d−qd-q 的坐标变换称为Park变换,根据图1所示各坐标系之间的关系,可得到下式:
![]()
其中, T2s/2rT_{2s/2r} 为坐标变换矩阵,可表示为:

将同步旋转坐标系 d−qd-q 的坐标变换到静止坐标系 α−β\alpha-\beta 的坐标变换为反Park变换,可表示为:

其中, T2r/2sT_{2r/2s} 为坐标变换矩阵,可表示为:

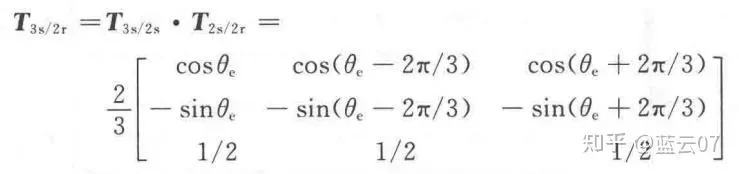
根据上面的变换可得,自然坐标系ABC变换到同步旋转坐标系d−qd-q 的关系:
![]()
其中, T3s/2rT_{3s/2r} 为坐标变换矩阵,可表示为:
同步旋转坐标系d−qd-q变换到自然坐标系ABC的关系:
![]()
其中, T2r/3sT_{2r/3s} 为坐标变换矩阵,可表示为:

二、PMSM数学建模
同步旋转坐标系d−qd-q下的数学模型,其定子电压方程可表示为:

定子磁链方程为:

代入上式得:

此时电磁转矩方程可写为:

还有几个重要的关系式为:

三、三相空间矢量
3.1 三相空间矢量介绍
SVPWM控制策略采用逆变器空间电压矢量切换获得准圆形旋转磁场,从而在不高的开关频率条件下,使得交流电机获得比SPWM算法更好的控制性能。此方法谐波优化程度高,可提高电压利用率,降低电机转矩脉动,并且适合数字化控制系统,易于控制。
空间矢量变换,将逆变器三相输出的3个标量转换为一个矢量的控制,其运动轨迹如图2:

根据图2得出3个标量合成一个矢量公式,矢量合成如图3:

电压空间矢量 UoutU_{out} 为:
![]()
探讨采用上述手段控制典型的两电平三相电压源逆变器,首先定义 sas_{a} 、 sbs_{b} 、 scs_{c} ,当 sas_{a} 、 sbs_{b} 、 scs_{c} 为1时,表示逆变器的上桥臂导通,下桥臂关断;反之,当 sas_{a} 、 sbs_{b} 、 scs_{c} 为0时,表示逆变器的上桥臂关断,下桥臂导通。因为同一桥臂的上下开关不能同时导通,所以可以得到8个基本电压空间矢量,分别为000,001,010,011,100,101,110,111,将复平面分成6个区域,称为扇区,如图4:

按照图5两电平三相电压源逆变器可知各矢量的公式为:

![]()
并且,相电压 UANU_{AN} 、 UBNU_{BN} 、 UCNU_{CN} 与开关函数之间的关系为:

3.2 三相空间矢量合成(SVPWM)
采用开关函数控制两电平三相电压源逆变器只能得到8个矢量,可这并不足够产生圆形的空间矢量运动轨迹。因此,利用平均值等效原理,在一个固定的开关周期 TsT_{s} 内对8个基本电压空间矢量进行组合。以扇区为划分,当电压空间矢量 UoutU_{out} 旋转到某个扇区,则可由两个相邻的非零矢量以及零矢量,按照不同的时间组合得到。以第一扇区为例,空间矢量合成图如图6所示:

根据平衡等效原则可以得到:


其中, T4T_{4} 、 T6T_{6} 分别为 U4U_{4} 、 U6U_{6} 的作用时间。
通过图6的几何关系可计算作用时间T4T_{4} 、 T6T_{6} 、 T0T_{0} ,如下:

其中 θ\theta 为合成矢量与主矢量的夹角。将 |U4|=|U6|=2/3∗Udc|U_{4}|=|U_{6}|=2/3*U_{dc}和 |Uout|=Um|U_{out}|=U_{m} 代入上式,可得:

四、SVPWM算法实现
如图7,为搭建的SVPWM模块仿真模型:

4.1 电压空间矢量扇区判断
要想实现SVPWM算法,首先要确定的就是电压空间矢量处于哪一个扇区,以此为基础确定合成矢量所使用的基本电压矢量。用 uαu_{\alpha} 、 uβu_{\beta} 表示参考电压矢量 UoutU_{out} 在 α\alpha 、 β\beta 轴上的分量,定义 Uref1U_{ref1} 、 Uref2U_{ref2} 、 Uref3U_{ref3} 三个变量,令:


令N=4C+2B+A,可以得到与扇区的关系如下表1所示:

按照上述方法搭建的扇区仿真模型如图8所示:

4.2 各矢量作用时间计算
由图6可知:

上式中 T4T_{4} 、 T6T_{6} 为个扇区的相邻矢量的作用时间,当电压空间矢量处于不同的扇区时,其对应的相邻矢量不同,通过上式可以求出当 UoutU_{out} 处于任一扇区时与其对应的相邻矢量的作用时间的绝对值可用下面三个式子表示:

则可得各矢量作用时间如表2:

如 T4+T6>TsT_{4}+T_{6}>T_{s} ,则需进行调制处理,令:

如图9与图10为扇区各矢量作用时间及扇区相邻矢量作用时间仿真模型:


4.3 扇区矢量切换点确定
首先定义:

则三相电压开关时间切换点 Tcm1T_{cm1} 、 Tcm2T_{cm2} 、 Tcm3T_{cm3} 与各扇区的关系如表3所示:

至于其具体原理,可参考我之前的回答:
永磁同步电机的预测控制仿真,引入占空比,如何一个周期直接输出两组控制信号?控制周期和采样周期如何设置? – 知乎
切换时间计算及PWM发生仿真模型如图10所示:

五、基于PI调节器的PMSM矢量控制仿真
5.1 电机参数
采用simulink电机模型自带参数模型11,其具体参数如表4:

5.2 仿真模型与结果
搭建的仿真模型如图11所示:

负载转矩设定为0 N⋅\cdotm,在0.25s时变为10N⋅\cdotm,给定转速初始值为n=1500r/min。转速环PI参数为, Kp=0.45K_{p}=0.45 、 Ki=10K_{i}=10 ,输出限制为[-120 120],电流环PI参数为, Kp=21.3K_{p}=21.3 、 Ki=2.88e−6K_{i}=2.88e-6 ,限制为[-150 150]。
转速波形为:

转矩波形为:

三相定子电流波形:


版权声明:本文为博主作者:Steven.Xi原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/gonggong11qqqww/article/details/130357337