文章目录
前言
前面刚刚在Solidworks软件中搭建了履带式机器人,为了在ROS下进行履带式机器人的仿真实验,接下来先将其转为URDF模型,并在rviz中显示。
一、安装sw_urdf_exporter插件
点击链接sw_urdf_exporter
下载最新版,注意在安装之前确保电脑上已安装Solidworks软件,工具栏中出现如下选项即安装成功

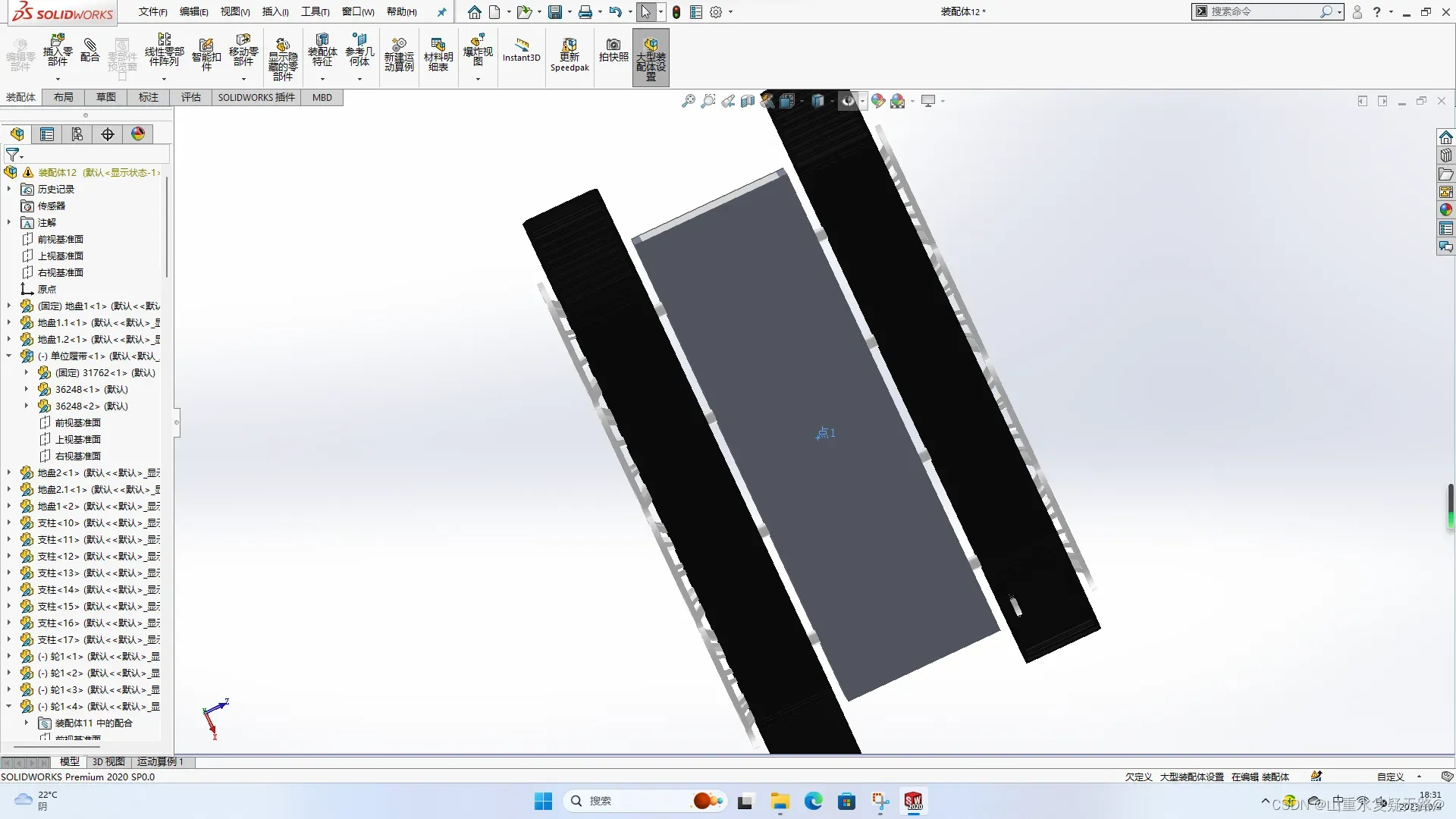
二、标记中心点
在使用插件导出solidworks模型之前,需要进行一些配置,以使机器人能够成功的导出为URDF模型。
base地盘的中心点:

轮子中心点:

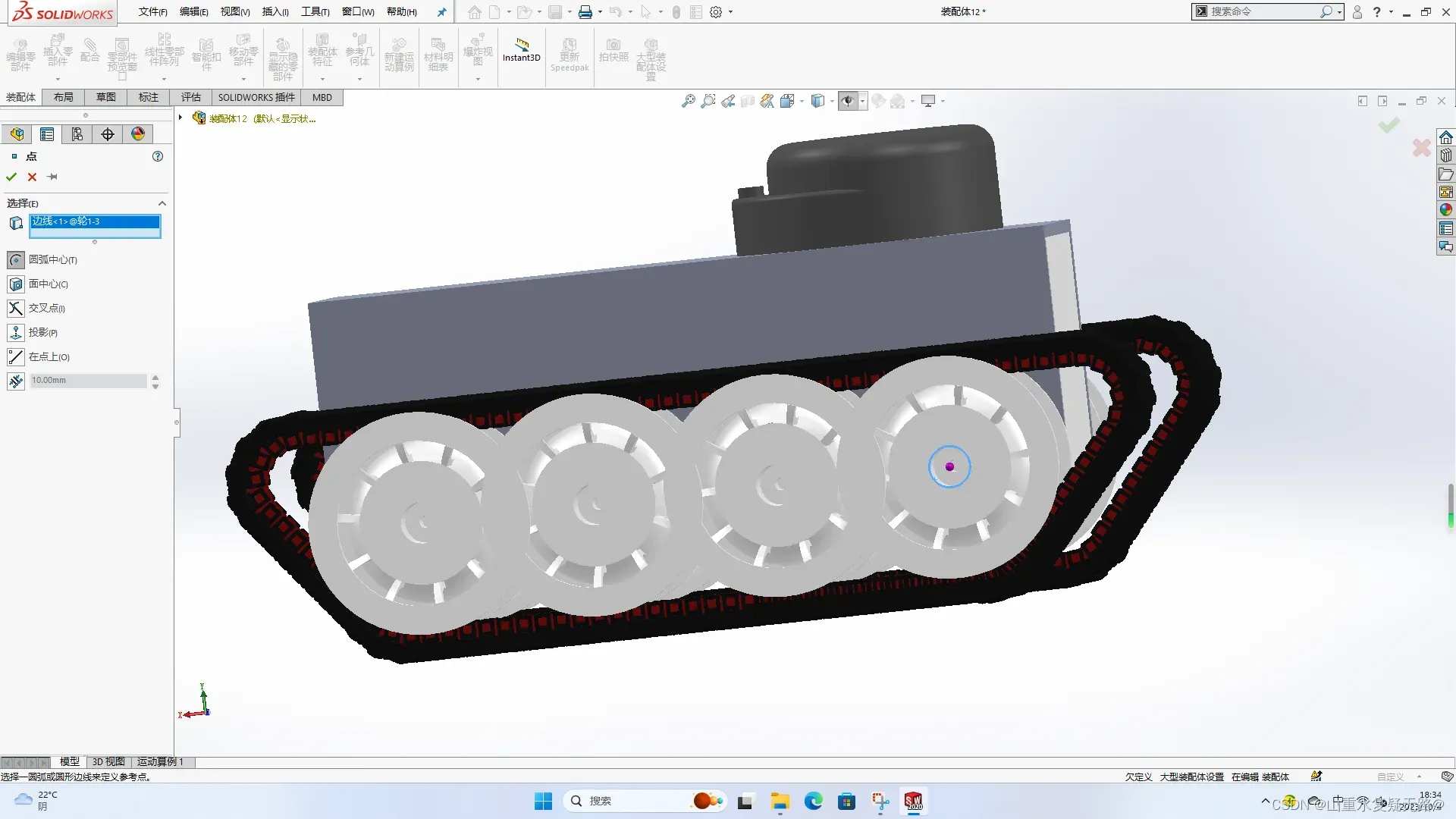
特别注意这里一定要记得自己每个轮子上所标的点,后面需要对标记的信息进行匹配,这里我是从车体左前轮起始,右后轮结束。

标记laser的中心点:

2.设置各中心点的坐标系
上面标记完中心点后,需要进一步的标记地盘、轮子、雷达的坐标系。这里注意solidworks默认的是y轴朝上,要使机器人在ros中正常显示,需提前将solidworks坐标系改为z轴朝上,且x轴应该为机器人前进的正方向。
地盘坐标系:

轮子各点坐标系:


雷达坐标系:

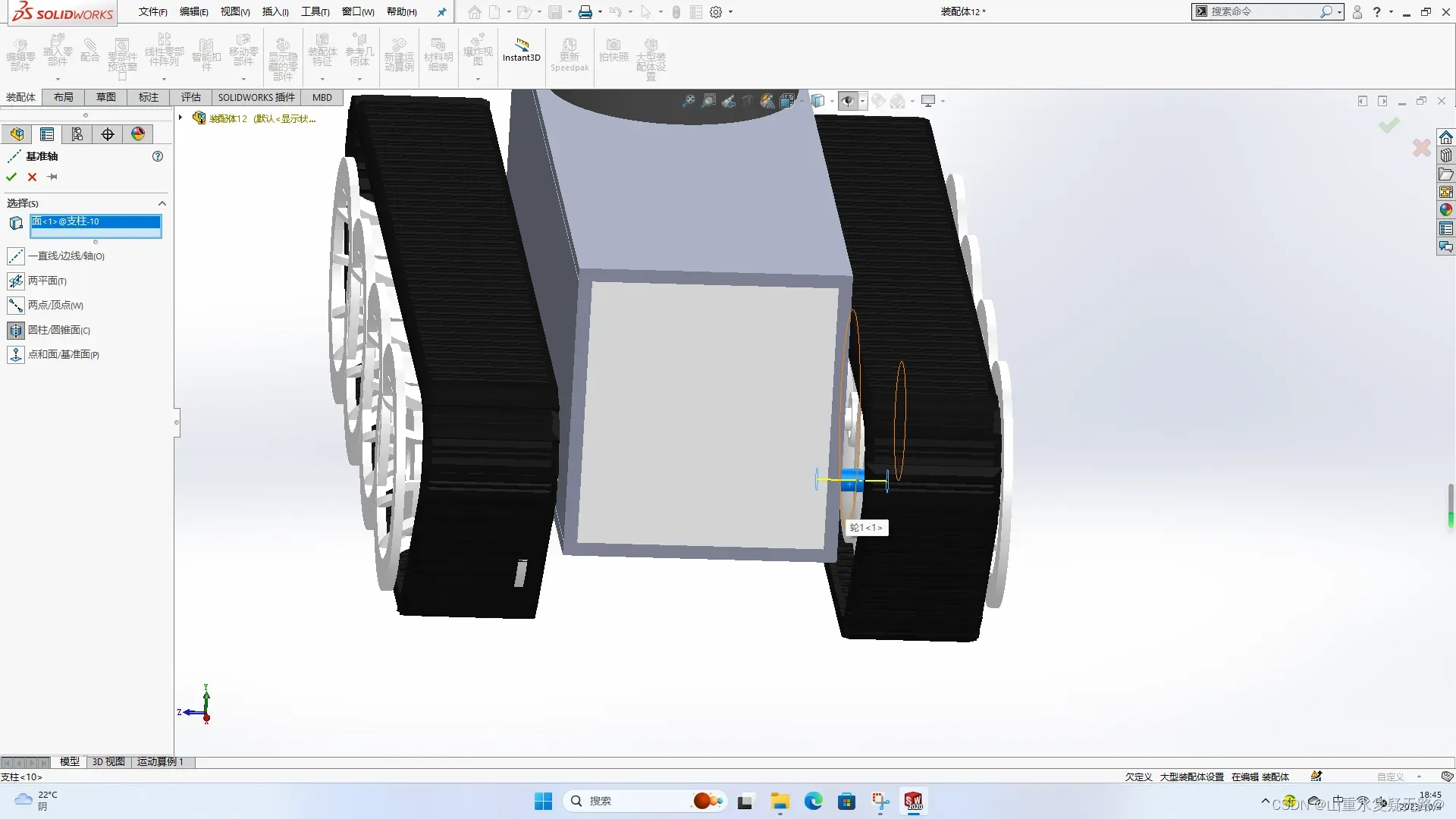
3.设置旋转轴
在进行导出前还需要确定各轮子的旋转轴,这里旋转轴的顺序最好也按顺序标定,方便后面的匹配。

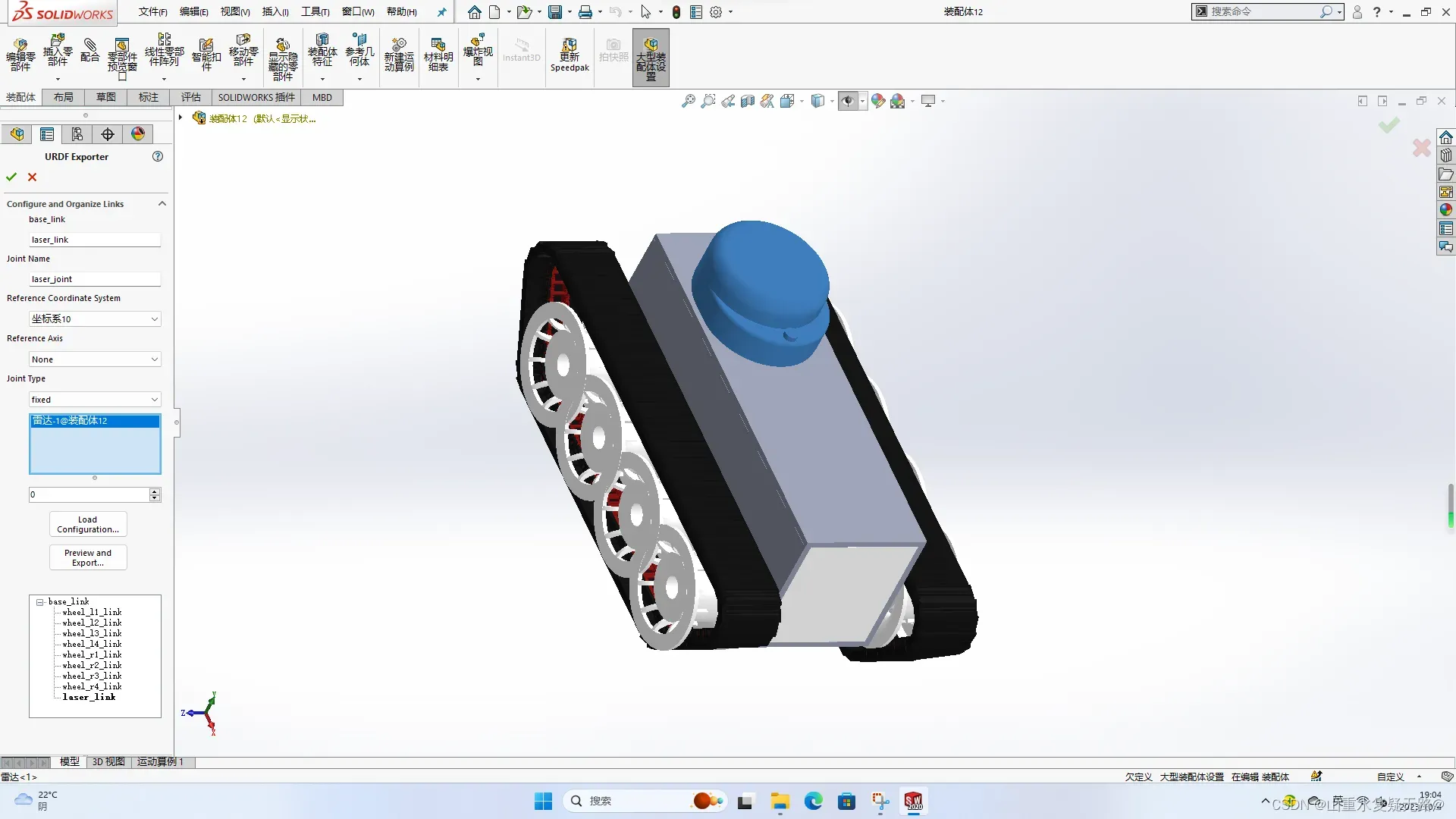
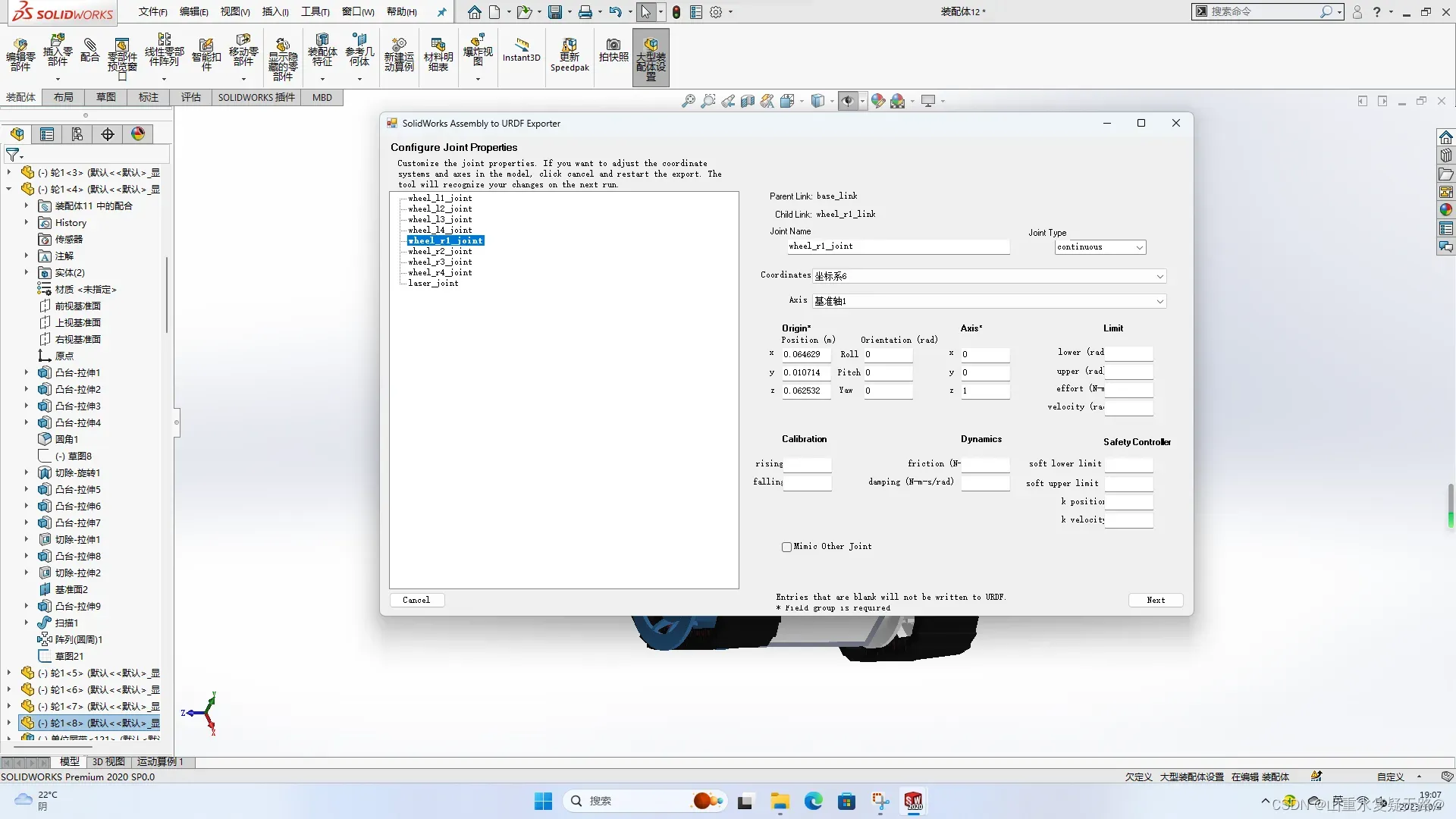
4.选择插件,准备导出
选择机器人的主题为base_link,这里选择机器人的车体为base_link,选中的部分呈现蓝色,如下图:


在base_link下添加子link,即各个轮子,依次选择前面设置的各个轮子对应的坐标系,以及旋转轴,并选择移动方式为continue,依次完成所有轮子的配置。


同理对雷达的坐标系进行选择,与轮子不同的是,雷达旋转轴设置为none,移动方式选为fixed(固定)。
然后即可点击插件进行导出:


认真检查前面的设置是否正确,合理(这里有一个对履带问题,放在后面记录)。
导出之后,可发现履带车的描述文件,自动生成为ros环境下可用的描述文件:


5.在RVIZ和gazebo中显示机器人模型
把机器人的description文件拷贝到自己的工作空间src里
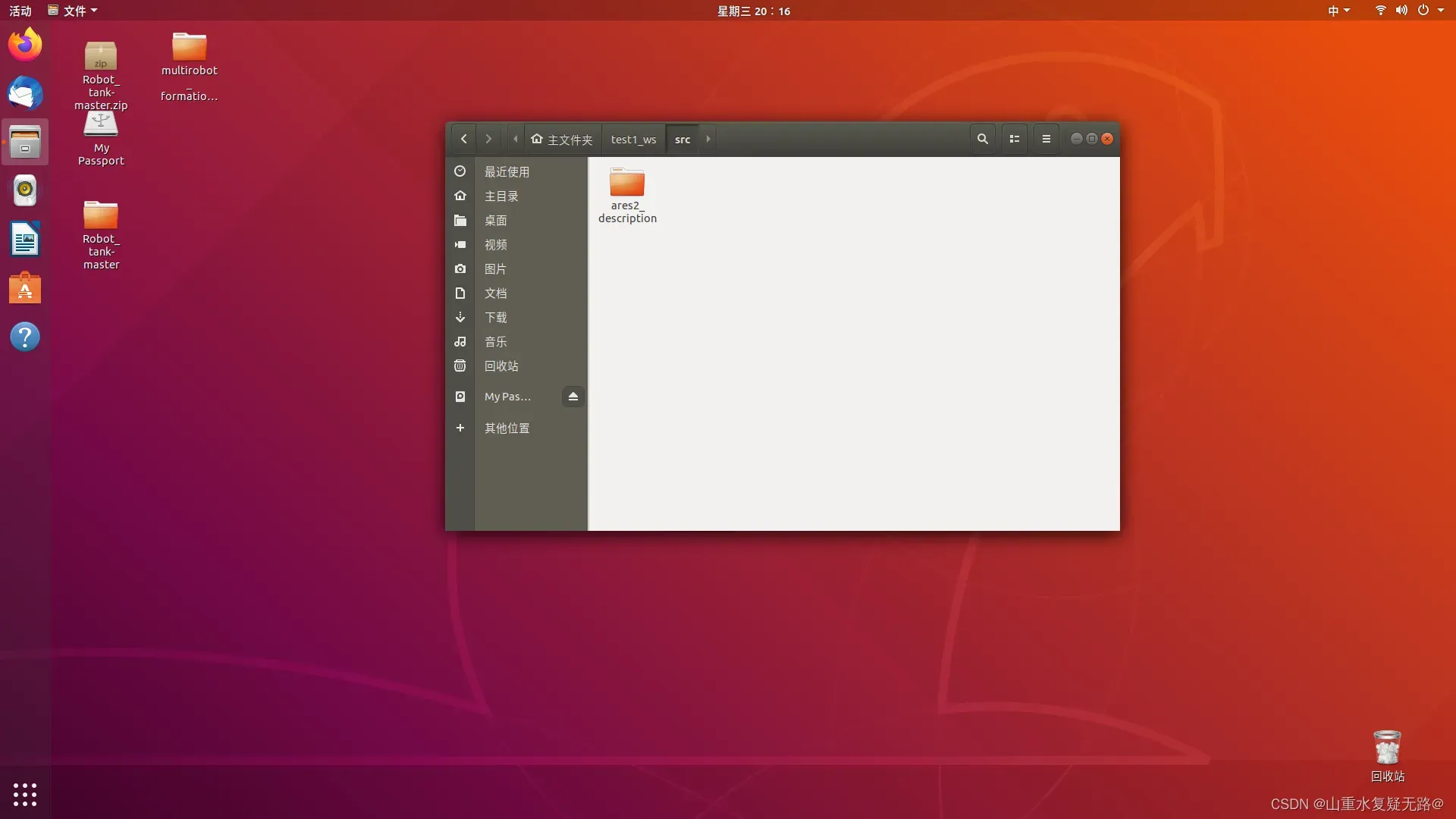
然后对工作空间进行编译

运行rviz的launch文件,并且将坐标系改为base_link

选择add添加机器人的模型

则机器人模型可成功在rviz中显示

gazebo同理,直接运行launch文件即可:

总结
虽然把solidworks中搭建的机器人模型成功在ROS的gazebo和RVIZ中成功显示了,但是还存在很多的不足需要改进,大家可能也注意到了,我最后一版标号15,可见前面我已经配置导出了多少次,除去操作失误,剩下很多次我都是在想办法配置履带,想办法设置履带的中心点呀,坐标系呀,旋转轴呀,几乎把我能够想到的全部试了一遍,很可惜履带的旋转效果还是没有做出来,要么是URDF文件根本加载不出来,要么是在ROS中不现实,更甚模型直接混乱。因为后面还要继续进行其他任务,履带动画的问题暂时先放一下,希望能够尽早解决这个问题吧。
版权声明:本文为博主作者:★五角星★原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/qq_45252077/article/details/133633099