💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
神经网络本身所具有的学习功能和非线性映射能力,为解决机器人控制问题提供了新的手段。近年来,神经网络在机器人运动学、动力学和机器人控制中已得到广泛应用,但由于神经网络本身的理论研究还很不完善,因此有必要对基于神经网络机器人控制系统的鲁棒性和稳定性做进一步研究,以便为神经网络在机器人中的应用奠定理论基础。
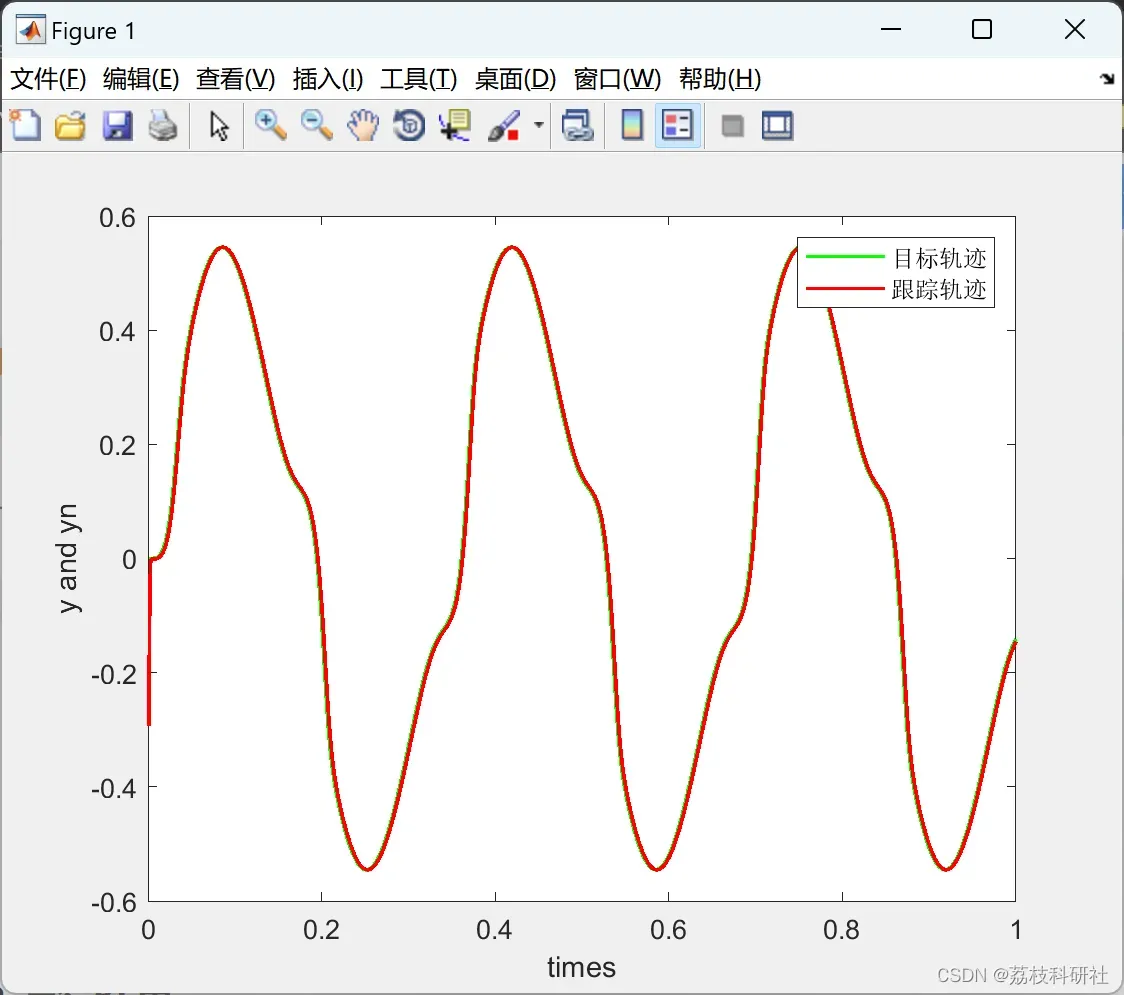
一般说,神经网络在机器人中的应用研究,应在常规控制方法的基础上.充分发挥神经网络的学习和映射功能·用神经网络来补偿机器人系统中摩擦、齿隙等一些很难用统一解析式表达的不确定因素,这样,由神经网络和常规控制构成的复合控制方能获得优良的性能。本文就是基于这一思想,讨论机器人系统数学模型未知时.利用神经网络作前馈补偿项和反馈控制来实现机械臂的轨线跟踪﹑通过对神经网络的训练使其输出能够逼近期望的前馈力矩。应用此方案.勿须加速度反馈,避免了对模型对象的要求.且具有较好的抗干扰能力。
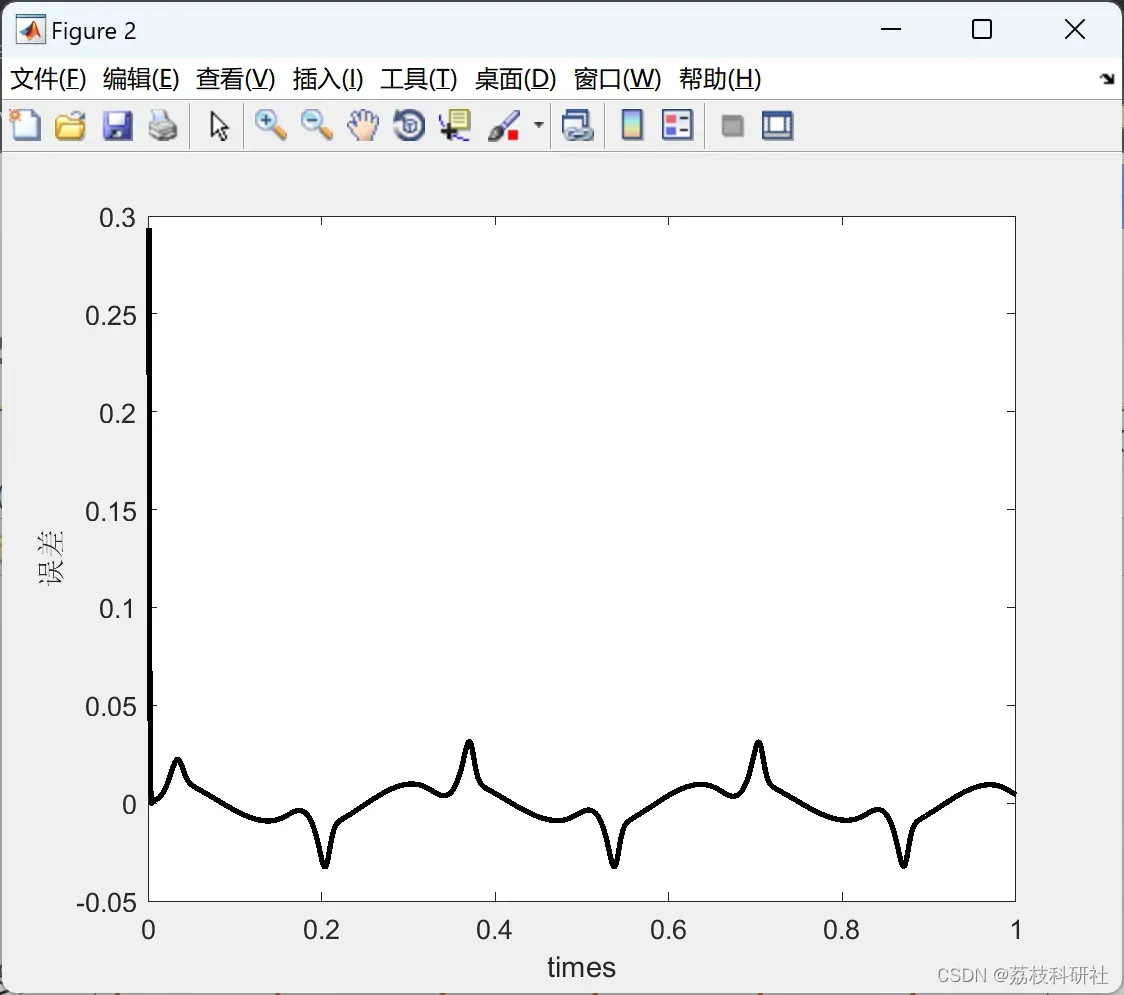
BP算法的学习过程由正向传播和反向传播组成。在正向传播过程中,输入信息从输入层经隐层逐层处理,并传向输出层,每层神经元(节点)的状态只影响下一层神经元的状态。如果在输出层不能得到期望的输出,则转至反向传播,将误差信号(理想输出与实际输出之差)按连接通路反向计算,由梯度下降法调整各层神经元的权值,使误差信号减小。
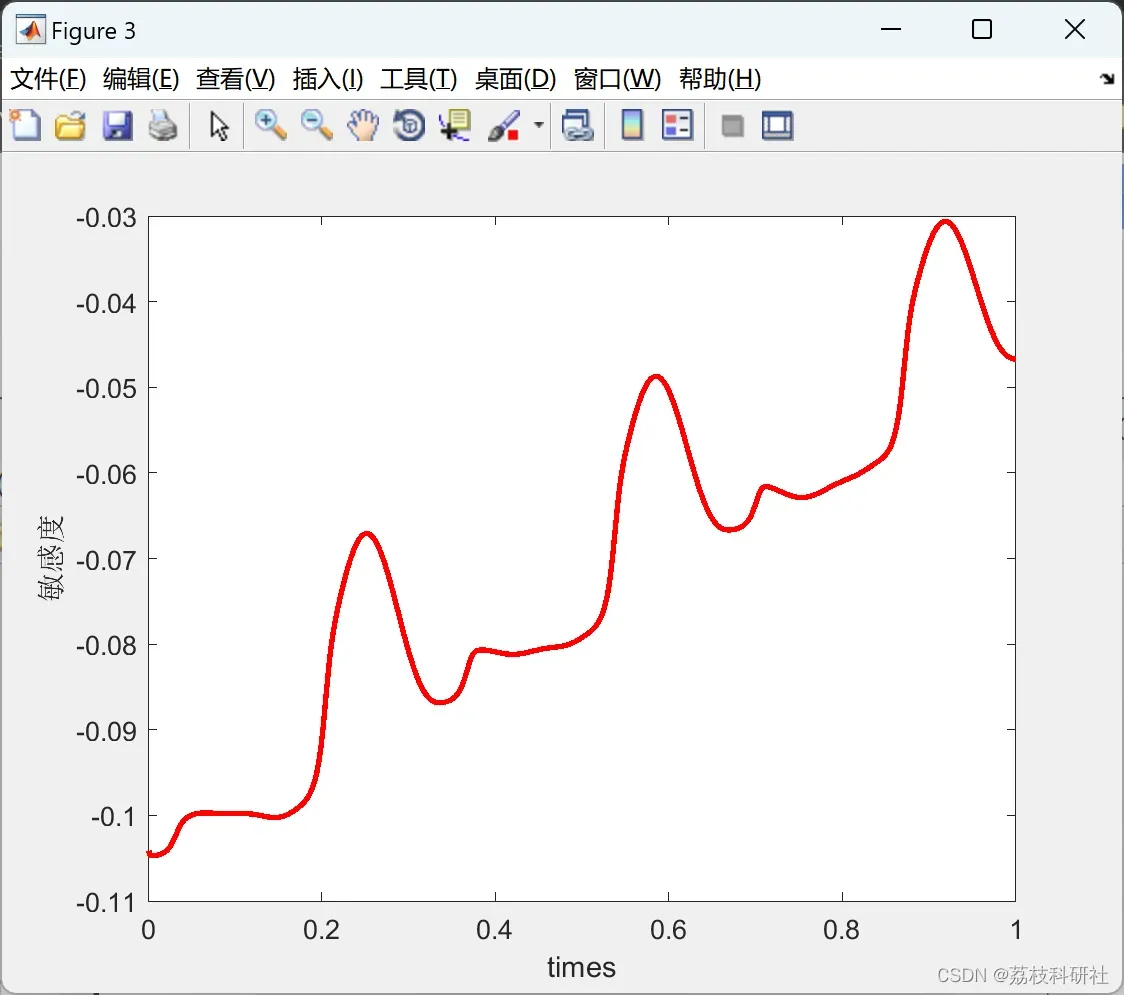
📚2 运行结果
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]刘俊东. 基于神经网络预测控制的移动机器人轨迹跟踪控制研究[D].重庆邮电大学,2021.DOI:10.27675/d.cnki.gcydx.2021.000572.
[2]刘凯.基于BP神经网络的四旋翼双闭环PID轨迹跟踪控制[J].工业控制计算机,2018,31(11):62-63.
[3]詹宇,方明正,胡锦辉,王迪妮,瞿圆媛.基于BP神经网络的掘进机行进轨迹跟踪控制研究[J].煤炭工程,2022,54(04):156-161.
[4]任雪梅.基于神经网络的机器人轨迹跟踪控制[J].控制与决策,1997(04):317-321+384.DOI:10.13195/j.cd.1997.04.31.renxm.006.
🌈4 Matlab代码实现
文章出处登录后可见!