ABAQUS中的显示-隐式联合分析
ABAQUS的主要求解器有显式求解器和隐式求解器。
- 隐式求解(Implicit method),在ABAQUS的Standard模块中进行隐式求解的计算。
- 隐式求解的特点是利用迭代的方法求解下一个增量步的未知量,即对于一个问题,隐式求解将其看作一个整体来进行矩阵的计算,迭代方法一般为Newton-Rapson法。
- 隐式求解没有条件稳定,任何大小的时间增量皆可让结果在一定范围内,但是由于采用的是迭代的方法,就会存在计算收敛性的问题。
- 不同于隐式,显式求解(Explicit method),在ABAQUS的Explicit模块求解。
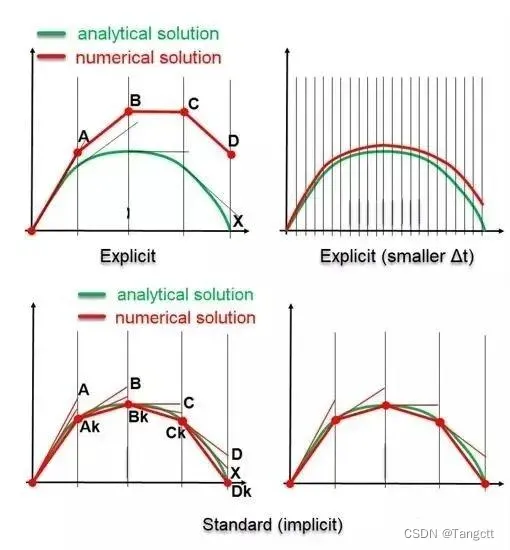
- 显式求解利用中央差分法,借助多个时间增量完成模拟。
- 显式只关注前一时刻的状态,它的每一步的求解都是基于前一步的结果,通过预先设置的时间增量来递推后面的结果。
- 如果时间增量很大,显式求解就会在很大程度上偏离真实结果。两种求解器算法区别如图所示。增量步必须小于一临界值,才会提供可靠的结果,显式求解有条件稳定,但没有收敛问题。
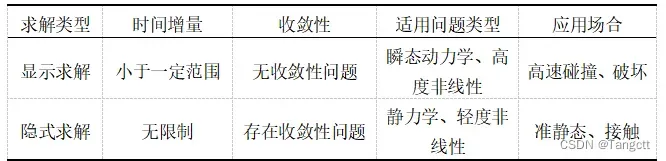
-在实际应用过程中,不同的领域和场合会采用不同的分析方法。显示求解与隐式求解的区别如表所示。
- 但是在某些特殊的场合下,往往会同时存在显式、隐式分析需求,此时就需要进行显式、隐式的联合仿真(Co-Simulation)。主要分为以下两种情况:
- 在复杂有限元模型的分析过程中,不同的模型区域可以发挥显式、隐式的各自优势。例如,在某款汽车的碰撞实验中,汽车前部的剧烈碰撞部位、轮胎和车头等属于高速动态撞击和复杂接触,则必须选用显式分析求解。同时,存在于汽车中后部的许多部件也同样需要进行仿真分析,这些部件在撞击的过程中只会受到很小的应力,并且撞击过程中相对稳定,并没有产生大量的形变或者损坏,故这些部件的需要进行隐式分析来求解。结合以上分析可得,在汽车碰撞的模拟实验中,可以对撞击的不同部位进行差异化的分析,并且这两种分析是同时存在于模拟的不同阶段,以反应最真实的撞击情况。
- 在一般计算冲压、断裂等涉及较强非线性和较大塑性变形的问题时,会使用到显式动力学分析。因为显式分析对于具有复杂接触和超大变形的问题能提供更好的收敛性。但如果要研究部件变形后的回弹问题,则一般使用隐式分析更加方便且准确。这时就需要使用到显式-隐式联合分析,将显示动力学分析的计算结果导入到隐式分析中作为初始条件,进行逐一分析。与上述情况不同的是,此种情况下的显式与隐式分析是分开进行的,并不存在于同一分析步中,而且采用了先进行显式分析后进行隐式分析的顺序进行,所以此种分析也能模拟大部分的真实情况。
- 所以,显式-隐式联合分析的需求存在于众多应用场合中。
文章出处登录后可见!
已经登录?立即刷新