对车辆建立数字化模型,分为车辆运动学和动力学模型。
车辆运动学模型:
车辆运动学模型(Kinematic Model )把车辆完全视为刚体,主要考虑车辆的位姿(位置坐标、航向角)、速度、前轮转角等的关系,不考虑任何力的影响。
1.前提假设:
- 不考虑Z轴方向运动,默认车在二维平面上的运动
- 假设车的左右轮胎有相同的转向速度的转向角度
- 假设车辆运动缓慢,忽略前后轴载荷的转移
- 假设车为一个刚体运动
- 假设车辆运动和转向为前轮驱动
例如如下图片:如下的公式推导都基于此图
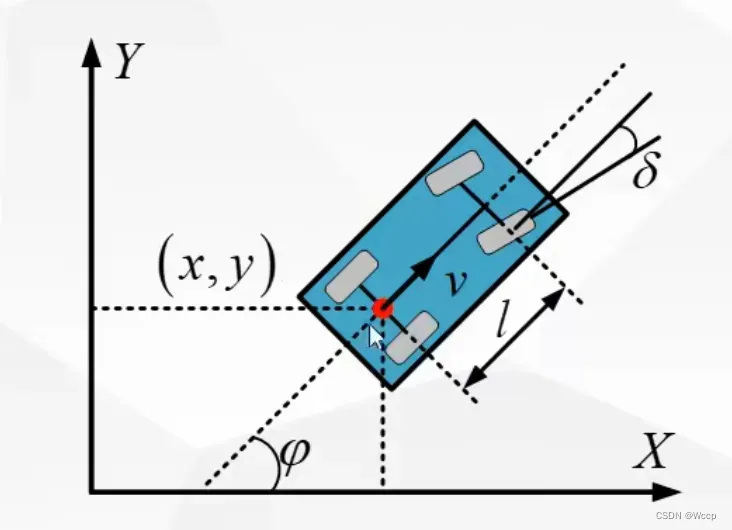
2.车辆运动学模型推导
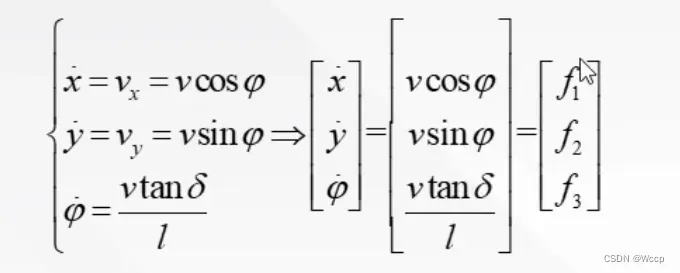
针对上图,我们分别求出对应的x速度,y速度,和航向角速度,这样对于状态量=[x,y,
],和控制量
=[v,δ]就可以有一个对应:
![]()
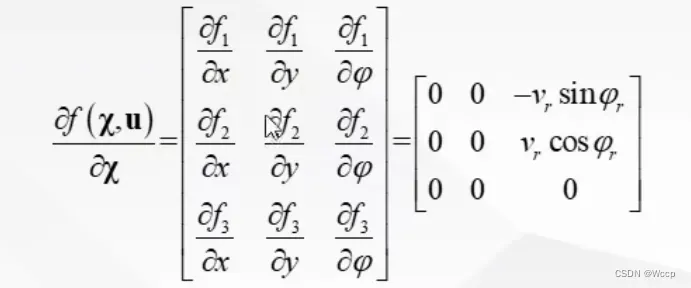
对上述在任意一个参考点r进行泰勒级数展开:

再求其中两个偏导:
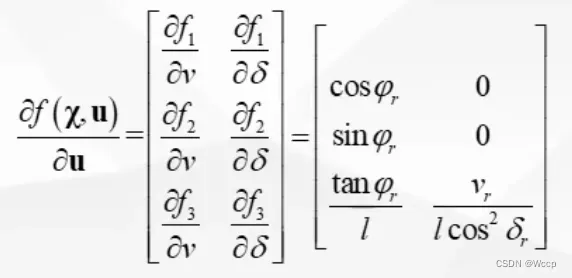
所以状态量误差的变化量为:

在对上面公式进行前向欧拉离散化:
![]()
最后得到:

所以这样,我们就得到了关于前一状态量误差与控制量误差和后一个状态误差量的关系。
即通过当前状态的状态量误差和控制量误差可以预测下一状态量误差。
车辆动力学模型:
车辆动力学模型((Dynamic Model )则需要考虑车辆和地面之间的力的影响,包括轮胎侧偏现象等。
车辆动力学模型根据自由度可以划分为:
- 二自由度模型:仅包括车辆侧向与横摆两个自由度。
- 七自由度模型:包括车身纵向位移、横向位移和横摆角速度与四个车轮的回转运动。
- 十一自由度模型:包括车辆纵向运动、车辆侧向运动、整车横摆、车身的俯仰、四个车轮的转动以及前轮转角。
根据受力方向又分为横向动力学和纵向动力学,一般两者解耦之后研究:
纵向上,通过控制轮胎转速实现速度跟踪;
模向上,通过控制前轮转角实现路径跟踪。
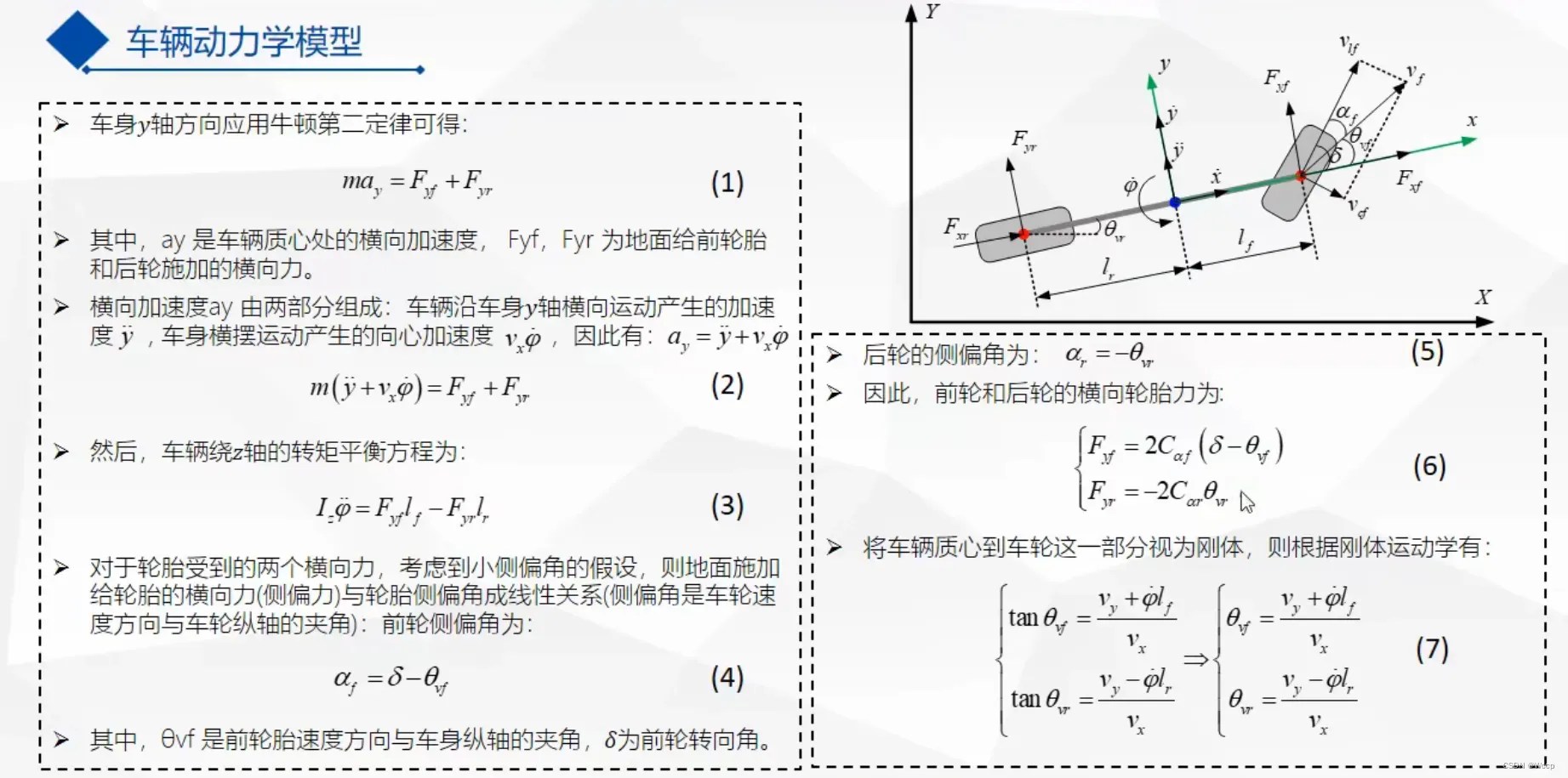
综上,在转向小角度及轮胎动力学的基础上,研究车辆线性二自由度动力学模型。
示图如下:
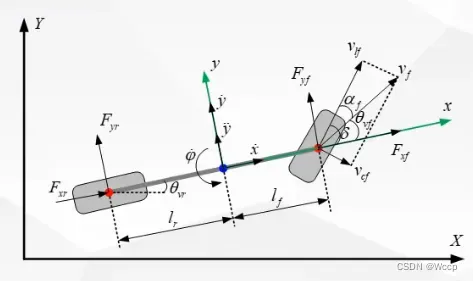
动力学方程推导如下:

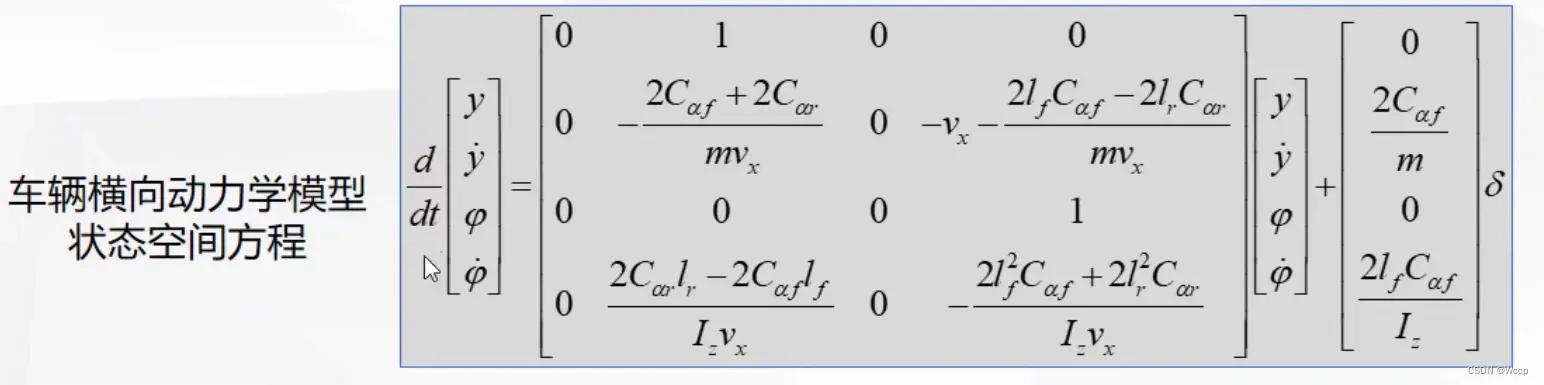
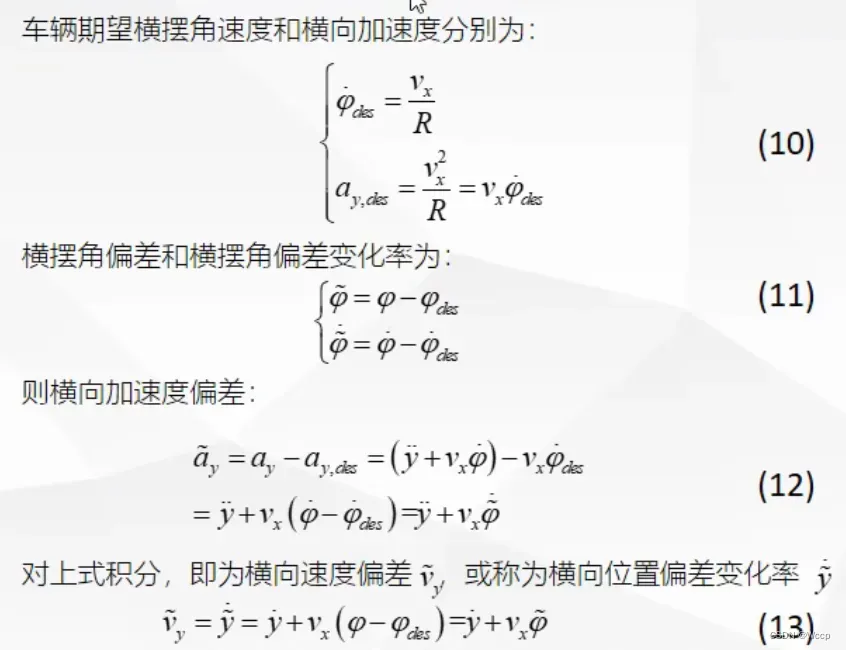
根据系统状态方程之后就可以分析出在给定的前轮转角输入下,车辆的横向位移、横向速度、横摆角以及横摆角速度的响应,但是横向跟踪控制的目的是为了减小跟踪偏差,需要的状态方程是能够分析在给定的前轮转角下车辆跟踪偏差的响应。
文章出处登录后可见!
已经登录?立即刷新