最近由于有开发智能语音机器人的需求,需要使用语音识别(ASR)和文本语音转换(TTS)技术,老板指定使用科大讯飞的原子能力来提供这两项技术的支持。在语音侧,我们使用开源的软交换系统FreeSwitch来对接科大的接口。在与科大讯飞的技术支撑沟通后,确认ASR和TTS的对接采用mrcp协议,幸好FreeSwitch是支持这个协议的,下面就把整个对接的过程记录下。
首先我们得搞清楚这个mrcp协议的大体交互流程,主要是如下图。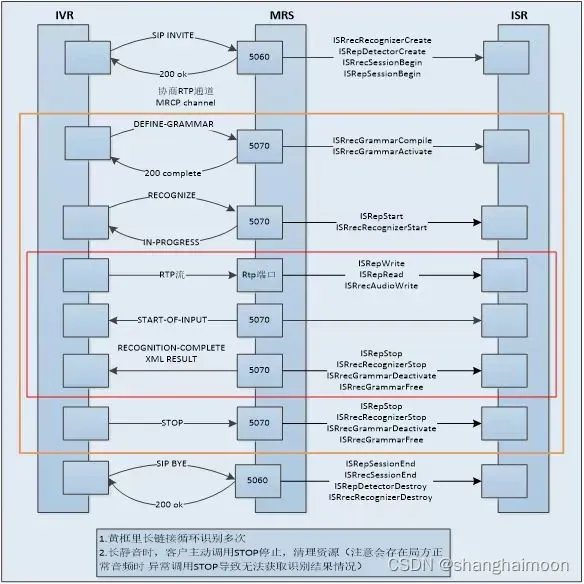
mrcp一般是由客户端发起invite请求与服务器协商语音编码和mrcp通道信息,然后进行基于mrcp协议的asr信息和tts信息的交互,最后进行rtp语音流交互并返回识别信息直到挂机为止。
FreeSwitch内部有一个mod_unimrcp的模块专门用来处理对接mrcp服务器,它的配置文件在conf/autoload_config/unimrcp.conf.xml中,主要的配置如下:
<configuration name="unimrcp.conf" description="UniMRCP Client">
<settings>
<!-- UniMRCP profile to use for TTS -->
<param name="default-tts-profile" value="kdxf-mrcp2"/>
<!-- UniMRCP profile to use for ASR -->
<param name="default-asr-profile" value="kdxf-mrcp2"/>
<!-- UniMRCP logging level to appear in freeswitch.log. Options are:
EMERGENCY|ALERT|CRITICAL|ERROR|WARNING|NOTICE|INFO|DEBUG -->
<param name="log-level" value="DEBUG"/>
<!-- Enable events for profile creation, open, and close -->
<param name="enable-profile-events" value="true"/>
<param name="max-connection-count" value="100"/>
<param name="offer-new-connection" value="1"/>
<param name="request-timeout" value="3000"/>
</settings>
<profiles>
<X-PRE-PROCESS cmd="include" data="../mrcp_profiles/*.xml"/>
</profiles>
</configuration>这其中最主要的是default-tts-profile和default-asr-profile的配置,它对应了ASR和TTS的配置文件,这个配置文件一般在conf/mrcp_profiles/下面,我们来看一下相关的配置:
<include>
<!-- 科大讯飞 Speech Server 5.0 MRCPv2 -->
<profile name="bjzk-mrcp2" version="2">
<param name="client-ip" value="172.28.105.14"/>
<param name="client-port" value="5191"/>
<param name="server-ip" value="172.28.105.13"/>
<param name="server-port" value="7010"/>
<!--param name="force-destination" value="1"/-->
<param name="sip-transport" value="udp"/>
<!--param name="ua-name" value="FreeSWITCH"/-->
<!--param name="sdp-origin" value="FreeSWITCH"/-->
<!--<param name="rtp-ext-ip" value="172.28.105.15"/>-->
<param name="rtp-ip" value="172.28.105.14"/>
<param name="rtp-port-min" value="4000"/>
<param name="rtp-port-max" value="5000"/>
<!-- enable/disable rtcp support -->
<param name="rtcp" value="1"/>
<!-- rtcp bye policies (rtcp must be enabled first)
0 - disable rtcp bye
1 - send rtcp bye at the end of session
2 - send rtcp bye also at the end of each talkspurt (input)
-->
<param name="rtcp-bye" value="2"/>
<!-- rtcp transmission interval in msec (set 0 to disable) -->
<param name="rtcp-tx-interval" value="5000"/>
<!-- period (timeout) to check for new rtcp messages in msec (set 0 to disable) -->
<param name="rtcp-rx-resolution" value="1000"/>
<!--param name="playout-delay" value="50"/-->
<!--param name="max-playout-delay" value="200"/-->
<!--param name="ptime" value="20"/-->
<param name="codecs" value="PCMU PCMA L16/96/8000"/>
<!-- Add any default MRCP params for SPEAK requests here -->
<synthparams>
</synthparams>
<!-- Add any default MRCP params for RECOGNIZE requests here -->
<recogparams>
<!--param name="start-input-timers" value="false"/-->
</recogparams>
</profile>
</include>这其中server-ip和server-port就是科大讯飞mrcp服务器的地址和端口。
在配置好后,我们就可以启动FreeSwitch进行应用了,我们可以在dialplan或者esl中调用App函数play_and_detect_speech来进行放音并识别的操作,典型的命令如下:
<extension name="play_and_detect_speech example">
<condition field="destination_number" expression="^(1888)$">
<action application="set" data="tts_engine=unimrcp"/>
<action application="set" data="tts_voice=donna"/>
<action application="play_and_detect_speech" data="say:please say yes or no. please say no or yes. please say something! detect:unimrcp {start-input-timers=false,no-input-timeout=5000,recognition-timeout=5000}builtin:grammar/boolean?language=en-US;y=1;n=2"/>
<action application="log" data="CRIT ${detect_speech_result}"/>
</condition>
</extension>最终我们可以通过获取SWITCH_EVENT_DETECTED_SPEECH的事件信息得到ASR的文本。
以上是关于语音原子能力引擎的对接,至于智能机器人的对话系统,科大讯飞提供了DCM系统,它是通过http restful接口来交互的,这块比较简单,就不再赘述了。大家有什么问题的话欢迎私信沟通。
文章出处登录后可见!