AprilTag简介
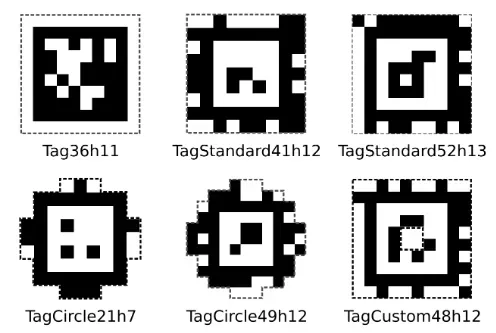
AprilTag类似于二维码QR codes(Quick Response Code;全称为快速响应矩阵图码)
AprilTag可用于多种用途,包括相机标定、目标大小估计单目距离测量等。
二维码可以直接用打印机打印在纸张上,不需要特殊材料。
而AprilTag检测程序可以计算相对于相机的三维位置和二维码所承载的ID信息。
参考链接:
AprilTag
apriltag_ros – ROS Wiki
使用前准备-功能包
sudo apt install ros-$ROS_DISTRO-apriltag-ros为了方便使用,我创建了一个新的功能包用于存放相机启动、标定文件已经apriltag_ros所需要的配置文件
cd ~/catkin_ws/srcgit clone https://gitee.com/bingda-robot/apriltag_detection.git功能包中有launch、config和doc目录
doc目录
存放了tag36h11标签族的标签图像,方便直接取用
config目录
存放相机标定文件ost.yaml和apriltag_ros相关的配置文件
其中settings.yaml文件配置了apriltag检测的标签类型、使用计算机资源等,完整的参数参考wiki链接
tags.yaml文件存放所检测的标签序号、尺寸信息,这里我们设置0、1、2三个标签的信息
standalone_tags:
[
{id: 0, size: 0.05},
{id: 1, size: 0.04},
{id: 2, size: 0.03},
]aunch目录
camera.launch用于启动相机并载入标定参数和矫正图像,关于相机标定和图像矫正可以参考之前的文章摄像头的标定
使用时需要根据你实际所使用的相机标定结果替换config目录中的相机标定文件ost.yaml
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
<param name="camera_name" value="usb_cam"/>
<param name="camera_info_url" value="file://$(find apriltag_detection)/config/ost.yaml"/>
</node>
<node name="charge_cam_image_proc" pkg="image_proc" type="image_proc" output="screen" ns="usb_cam" />
<node pkg="tf" type="static_transform_publisher" name="base_footprint_to_camera"
args="-0.04 0.0 0.05 -1.57 0.0 -1.57 base_footprint usb_cam 20">
</node>
</launch>continuous_detection.launch参考了apriltag_ros中的示例文件,主要修改了参数文件载入路径和相机名称
<launch>
<arg name="launch_prefix" default="" /> <!-- set to value="gdbserver localhost:10000" for remote debugging -->
<arg name="node_namespace" default="apriltag_ros_continuous_node" />
<arg name="camera_name" default="/usb_cam" />
<arg name="image_topic" default="image_rect" />
<!-- Set parameters -->
<rosparam command="load" file="$(find apriltag_detection)/config/settings.yaml" ns="$(arg node_namespace)" />
<rosparam command="load" file="$(find apriltag_detection)/config/tags.yaml" ns="$(arg node_namespace)" />
<node pkg="apriltag_ros" type="apriltag_ros_continuous_node" name="$(arg node_namespace)" clear_params="true" output="screen" launch-prefix="$(arg launch_prefix)" >
<!-- Remap topics from those used in code to those on the ROS network -->
<remap from="image_rect" to="$(arg camera_name)/$(arg image_topic)" />
<remap from="camera_info" to="$(arg camera_name)/camera_info" />
<param name="publish_tag_detections_image" type="bool" value="true" /> <!-- default: false -->
</node>
</launch>
使用前准备-标签
将doc目录中的AprilTag_0_1_2.pdf文件按照一比一打印在A4纸上,如有条件,可以将打印后的A4纸贴在亚克力板或者硬纸板上,避免二维码因为纸张弯曲大幅度变形
运行AprilTag检测
尝试启动相机和apriltag检测程序
roslaunch apriltag_detection camera.launchroslaunch apriltag_detection continuous_detection.launch 打开一个rqt_image_view订阅/tag_detections_image话题,将标签纸放在相机前
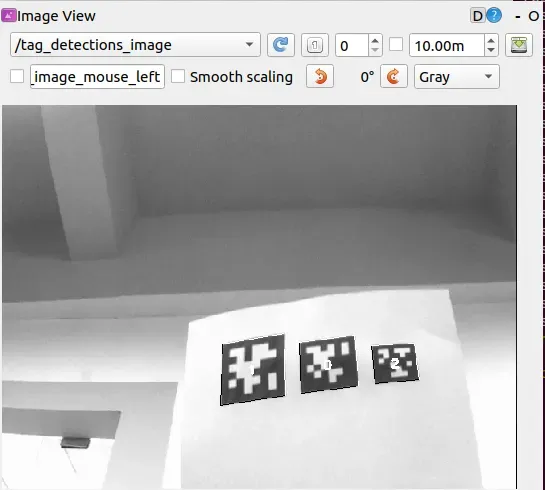
检测到的标签会被白色框框出,并标注标签的值
打开rviz,将Fixed Frame设置为base_footprint,rive中会显示标签和相机坐标位置关系
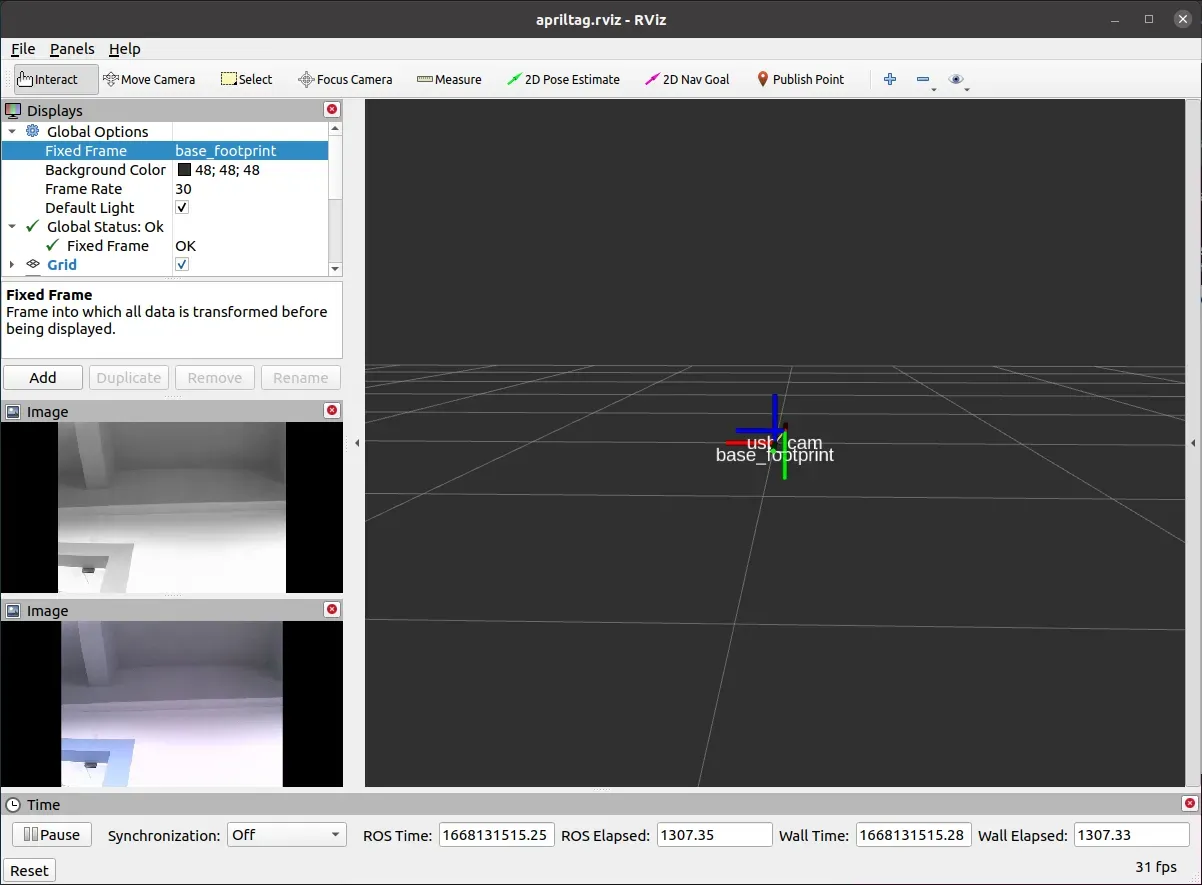
tag_detections话题会输出当前检测的标签位置信息
rostopic echo /tag_detections通过订阅tag_detections话题或者监听相机坐标相对于标签坐标之间的位置关系,就可以获得标签和相机之间的位置关系,有了这个比较准确的位置关系,可以完成目标跟踪、视觉抓取等应用。
文章出处登录后可见!