
【线激光扫描三维成像】
- 本文以 基于一维移动平台的线激光扫描三维成像项目为例,用通俗的语言让读者快速理解线激光扫描三维成像的原理。
-
文章目录
线激光扫描三维成像概念
- 线激光扫描:利用线激光器扫描待测物体,相机采集待测物体表面的形变激光线(二维图片)
- 三维成像:计算机处理形变激光线的图片,通过一些算法计算得到待测物体表面三维点云数据
- 综上所述,线激光扫描三维成像,就是在待测物体周围设置视觉传感器(相机+激光器),激光器投影到待测物体表面产生形变线激光,相机采集形变线激光图片,然后通过一定的算法计算得到待测物体表面的三维点云数据。
线激光扫描三维成像优点(相较于二维视觉)
以工业流水线上对外形不规则且具有随机位姿的工件抓取为例:
- 二维视觉缺少深度信息,而三维视觉弥补了这个缺陷。
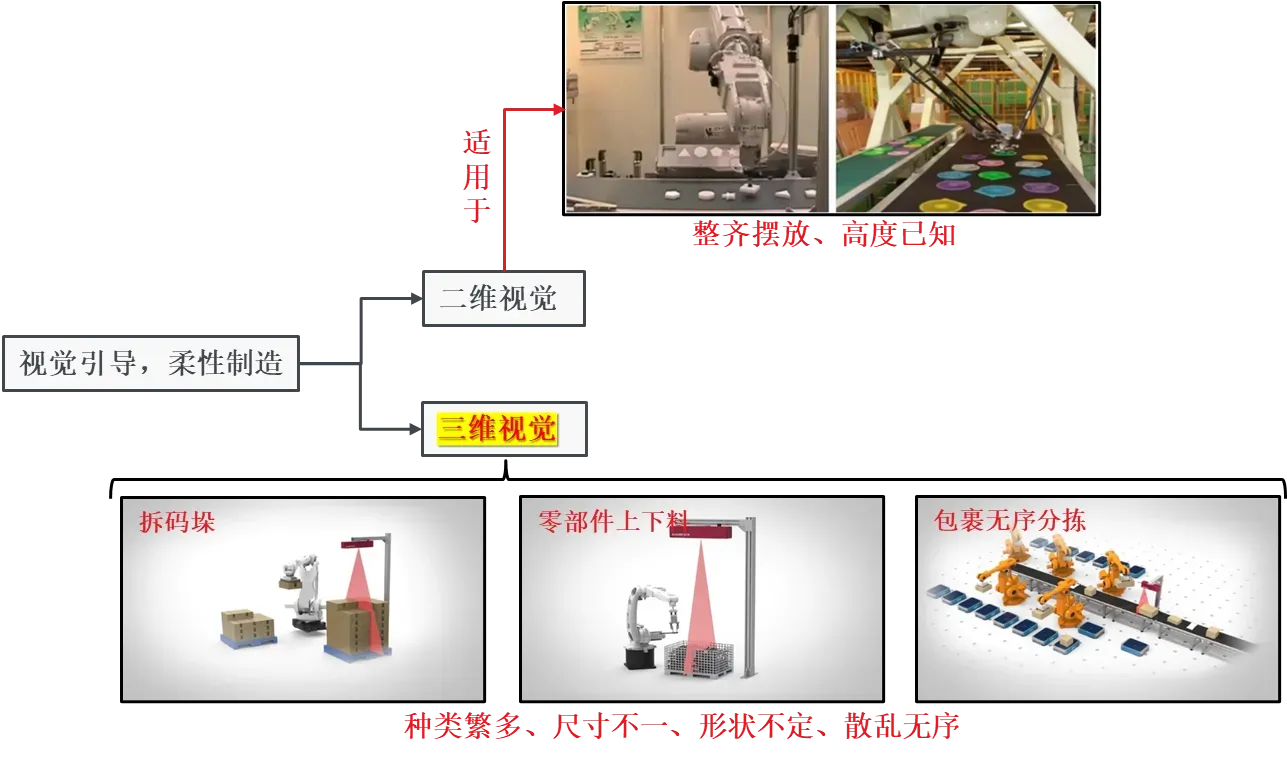
线激光扫描三维成像应用(简单列举)

线激光扫描三维成像装置
硬件选型
对于装置的硬件选型,其实没有一个固定的选型搭配,要根据实际应用场景去挑选合适的型号。下面列举必要的配件“
- PC:主要是影响速度,在算法方面无法对速度进行提升之后,只有对硬件进行提升了。
- 相机:一般选择工业相机,主要影响精度,工业相机的优点就是长时间工作稳定性好。
- 线激光器:投影的激光线条越细越好,因为三维成像需要提取形变线激光的中心线。
- 一维移动部件:传送带等。因为相机和激光器是固定不动的,需要移动装置载着待测物体移动,完成扫描。
装置搭建
- 线激光扫描三维成像装置可以如下图这样搭建。
- (1)工业相机(2)线激光器(3)工业镜头(4)铝型材(5)传送带(6)光电传感器(7)机械臂
![> [装置搭建方法,可列举步骤~]’ height=’567′ width=’1122’></p><h2><span class="ez-toc-section" id="25E725BA25BF25E625BF258025E52585258925E6258925AB25E6258F258F25E425B8258925E725BB25B425E62588259025E52583258F25E825BD25AF25E425BB25B625E525AE259E25E7258E25B0"></span><a id="_38"></a>线激光扫描三维成像软件实现<span class="ez-toc-section-end"></span></h2><h3><span class="ez-toc-section" id="25E725AE259725E625B3259525E52588259725E425B825BE"></span><a id="_39"></a>算法列举<span class="ez-toc-section-end"></span></h3><blockquote><p>要实现物体的三维成像,主要就是利用计算机处理相机采集的待测物体表面的形变激光线,说白了,就是一个对二维图像的处理过程。<br> 可以简单的列举如下:</p><ul><li>标定过程:相机标定,光平面标定、扫描方向标定。如果采用多相机,还会涉及多相机联合标定。</li><li>二维图像处理:激光中心线提取。当然还会涉及一些常用的图像处理算法:去噪、二值化等等。</li><li>三维点云处理:点云拼接、融合。当然还会涉及一些常用的点云处理算法:去噪、采样等等。</li><li>其他算法:比如传送带运动控制,相机采集控制(多相机同步采集)等等。</li></ul></blockquote><h3><span class="ez-toc-section" id="25E625A0258725E525AE259A25E5258E259F25E725902586"></span><a id="_47"></a>标定原理<span class="ez-toc-section-end"></span></h3><blockquote><ul><li>标定,其实就是得到一个转换关系,通过这个转换关系可以实现二维像点到三维物点的转换。</li><li>相机标定:得到像点到物点转换关系,这里的得到的物点其实是假三维,因为其高度信息还是未知的。</li><li>光平面标定:得到光平面方程,可以得到其高度信息。</li><li>扫描方向标定:得到相邻两条形变线激光之间的间距,用于点云的排列。</li><li>多相机联合标定:得到多个视角坐标系的转换关系,可以将多视角数据统一到同一个坐标系。</li></ul></blockquote><p><img style=](https://aitechtogether.com/wp-content/uploads/2023/09/63fdad82-6e26-44e8-a80c-912530c635e9.webp)
二维图像处理原理
投影的激光线,在物体表面的成像其实是有一定宽度的,我们需要提取到他的中心线坐标。
常见的光条中心线提取算法有:边缘法、中心法、细化法、极值法、灰度重心法、模板法、曲线拟合法等等。


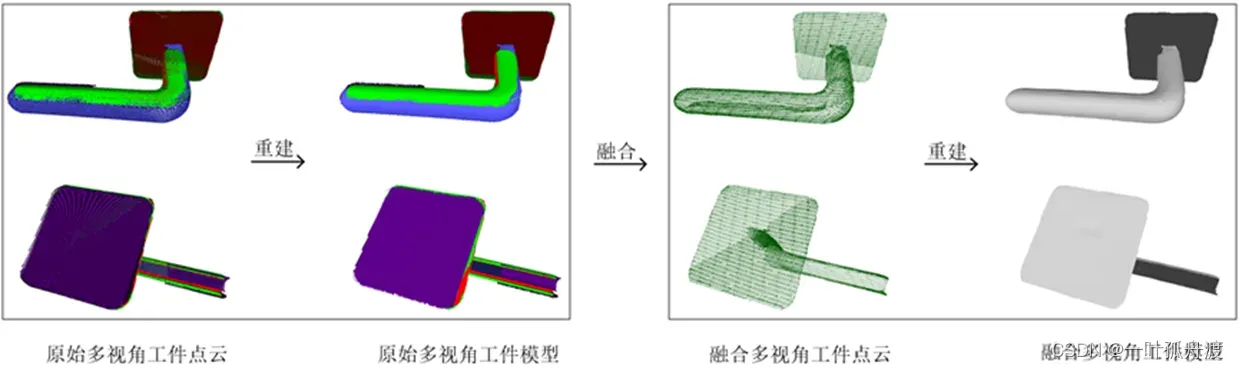
三维点云处理原理
三维点云处理,主要就是点云融合,这里可能涉及到点云的去噪、下采样、孔洞填充等处理过程。
文章出处登录后可见!
已经登录?立即刷新