目录
- 前言
- 一、D435i深度相机介绍
- 二、Windows下安装D435i
- 1.安装Intel® RealSense™ SDK 2.0
- 2.使用Intel® RealSense™ Viewer查看D435i可视化界面
- 3.使用D435i读取保存各类图片实战
- 二、Ubuntu16.04下安装D435i
- 1.Linux Distribution——命令行安装
- 2.源码安装
前言
最近组里面的项目需要用到D435i深度相机采集深度图片,所以记录一下在Windows+Ubuntu的环境下使用D435i深度相机的流程,以及如何利用python读取、保存常见的RGB、Depth图片。
一、D435i深度相机介绍
D435i 在小巧外形中采用英特尔模块和视觉处理器,是一个功能强大的一体产品,可与可定制软件配合使用,是一款能够了解自身运动的深度摄像头。 运动中的摄像头的理想选择 D435i 结合了宽视场和全局快门传感器,是机器人导航和物体识别等应用领域的首选解决方案。 更宽的视场使单个摄像头能够覆盖更广的区域,从而减少“盲点”。 全局快门传感器提供极低的光敏感度,使机器人能够在关灯的情况下在空间中导航。 简单集成的完整套件 深度摄像头 D435i 属于英特尔® 实感™ D400 系列摄像头,该产品系列采用了英特尔最新的深度感知硬件和软件,并将其封装到易于集成的产品中。

二、Windows下安装D435i
1.安装Intel® RealSense™ SDK 2.0
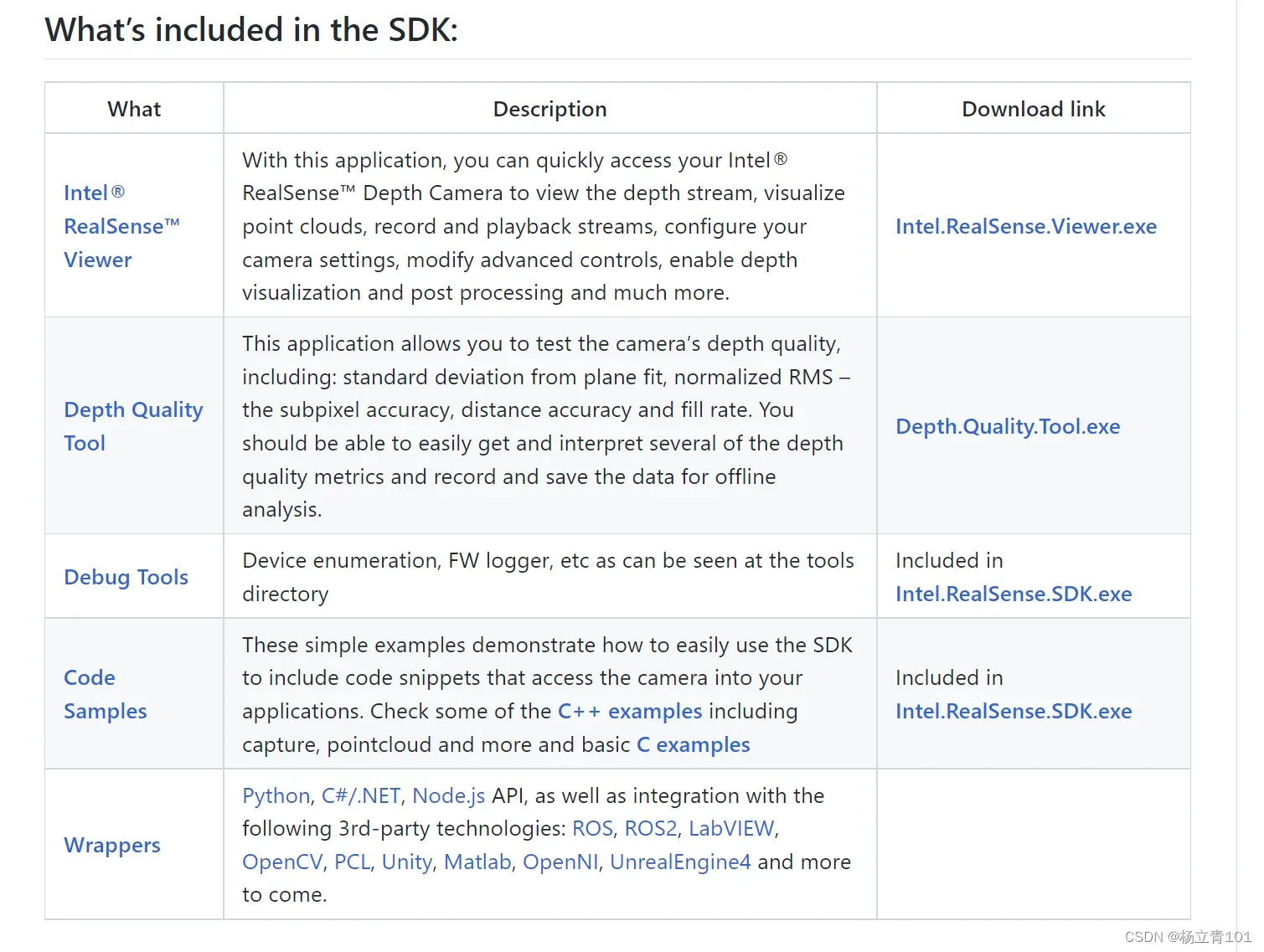
进入到官方的GitHub链接librealsense,翻到Download and Install部分,可以看到我们要下载的SDK,SDK包含以下几个部分:分别是Intel® RealSense™ Viewer,Depth Quality Tool,Debug Tools,Code Samples,Wrappers,分别指的是:相机的可视化界面、深度质量检测、调试工具、示例程序、还有各种封装(Wrappers)。
如果是需要对深度图开发那么建议下载完整的SDK,如果仅仅是要做可视化部分的话只下载Intel® RealSense™ Viewer即可。
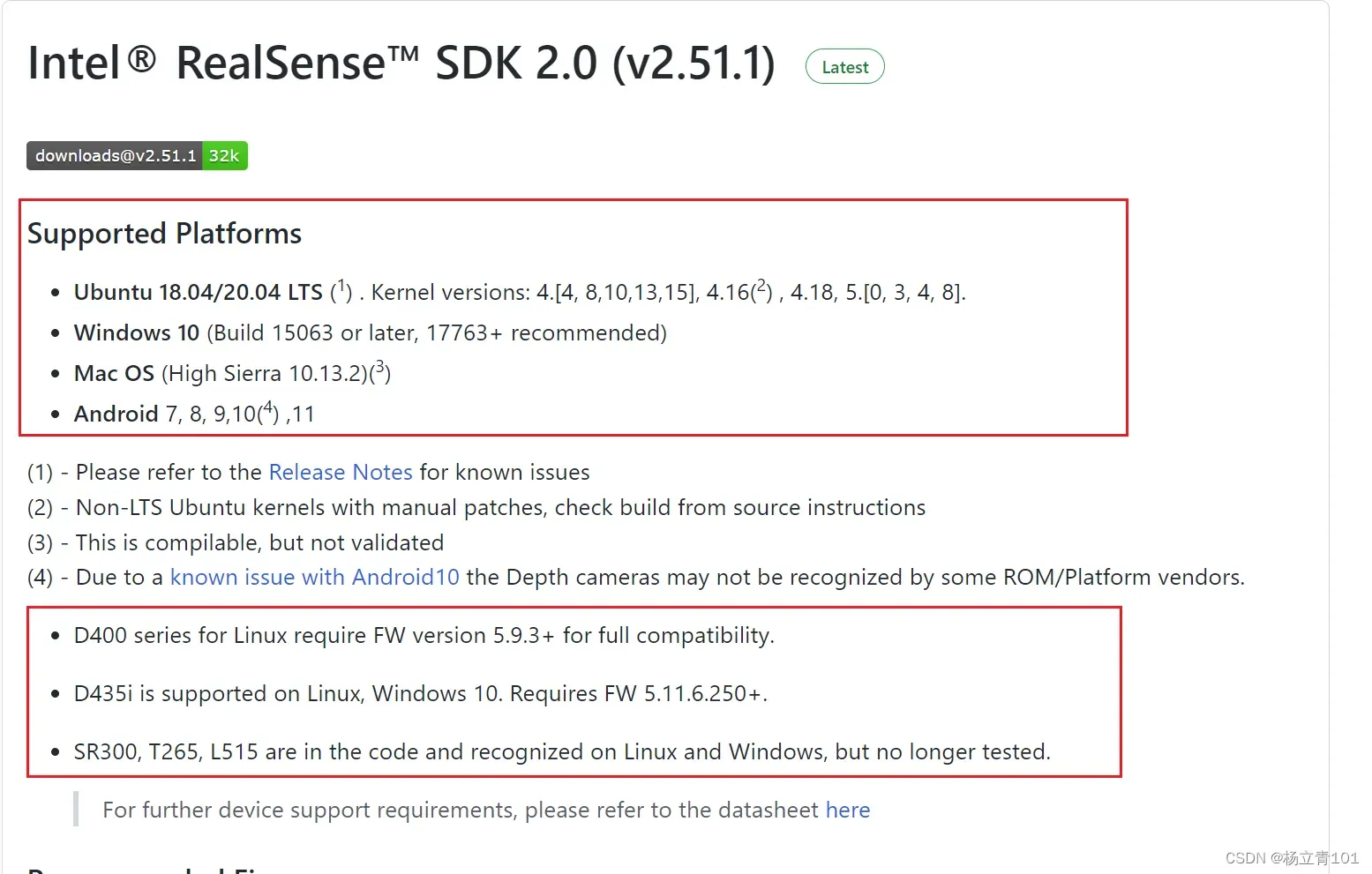
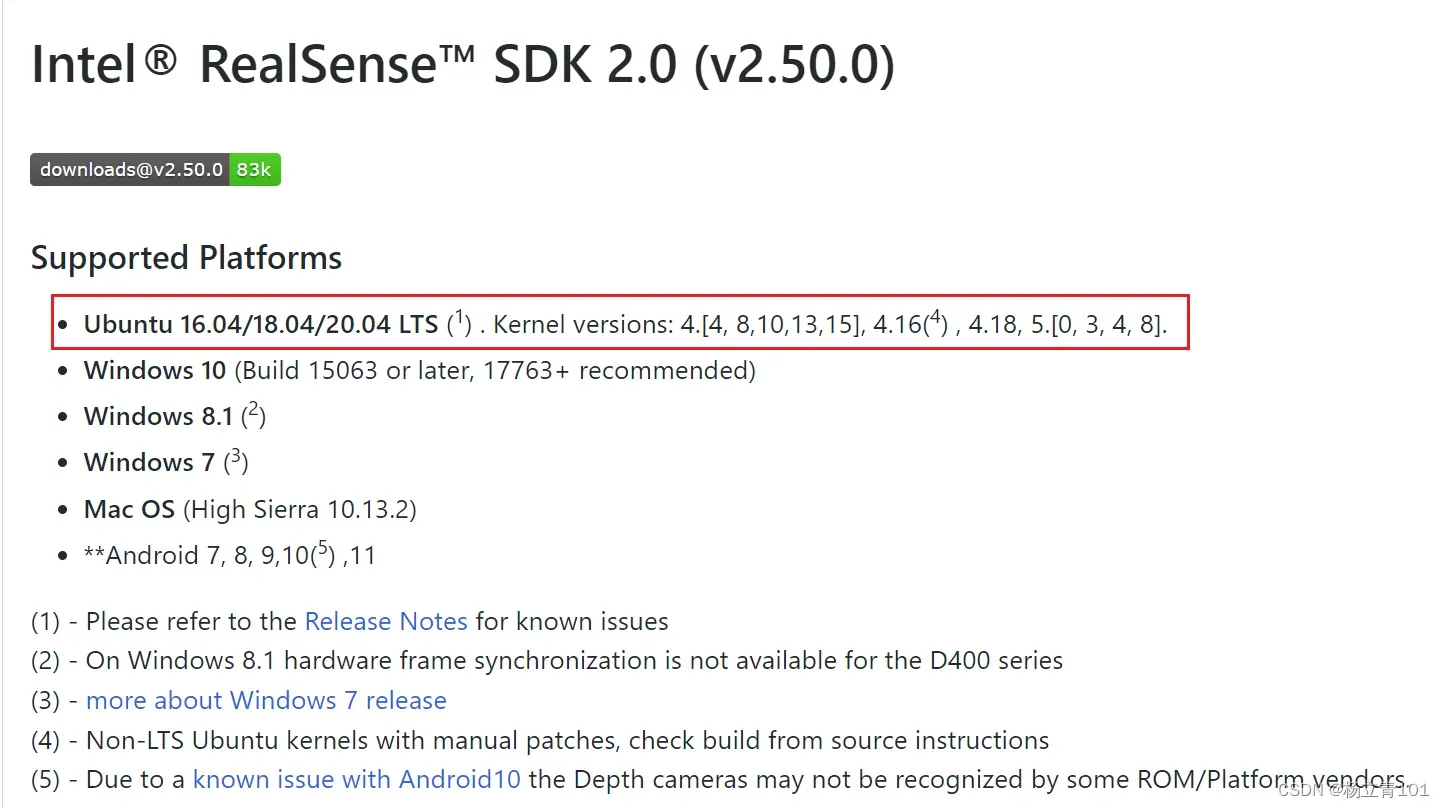
进入到下载界面之后这里会介绍Intel® RealSense™ SDK 2.0支持的平台要求,以下图为例,Intel® RealSense™ SDK 2.0的v2.51.1版本对window和Ubuntu的版本要求如下:
Ubuntu 18.04/20.04 LTS (1) . Kernel versions: 4.[4, 8,10,13,15], 4.16(2) , 4.18, 5.[0, 3, 4, 8].
Windows 10 (Build 15063 or later, 17763+ recommended)
因此在安装Intel® RealSense™ SDK 2.0的时候要注意我们的平台的版本信息,否则会出大问题。
之后是对不同的package的安装,这个根据自己的需求选择即可:
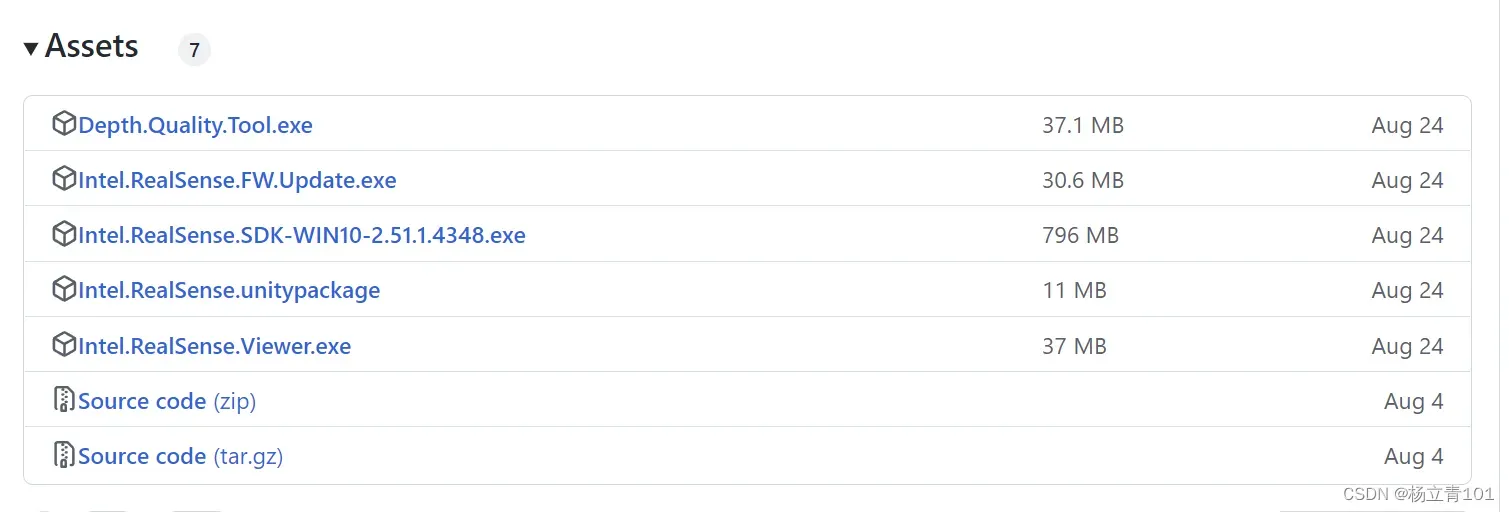
下载完成后需要进行安装,安装过程中直接一直点next即可,似乎无法更改路径!!!
默认安装即可。
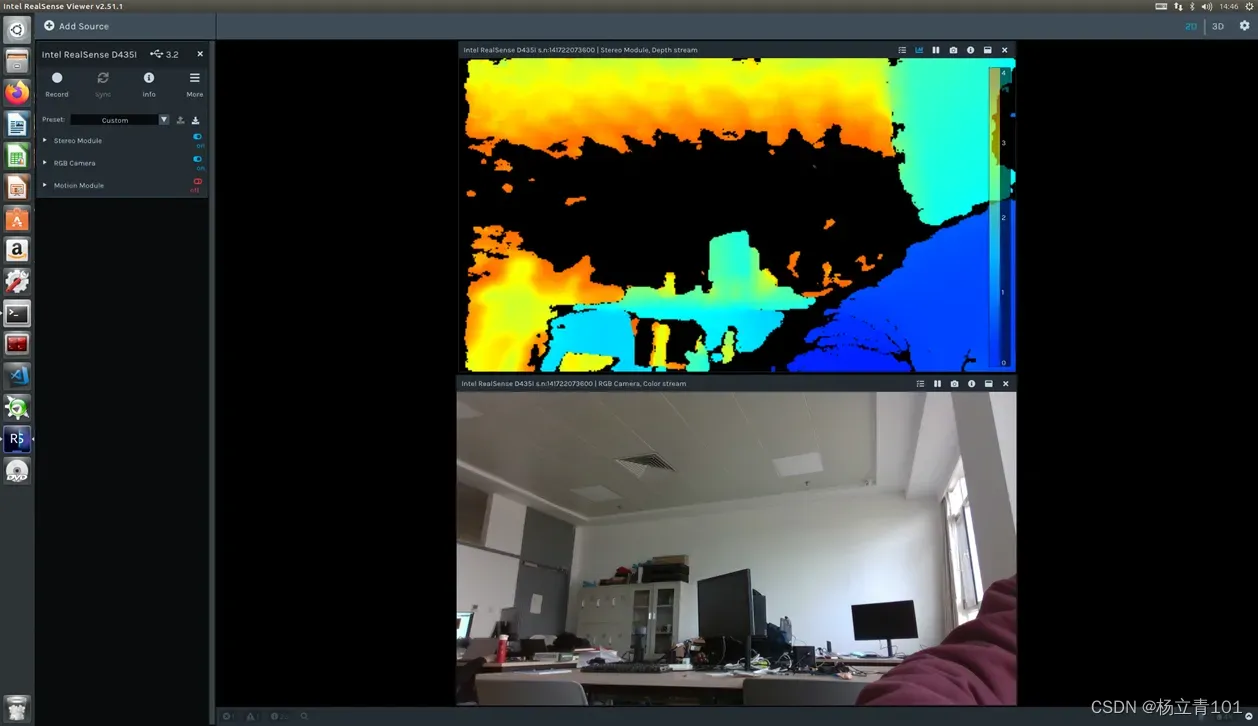
2.使用Intel® RealSense™ Viewer查看D435i可视化界面
将D435i与电脑相连,注意这里需要USB3.0才能成功连接,但是!!!如果你的数据线不是原装的有可能需要的是USB2.0。
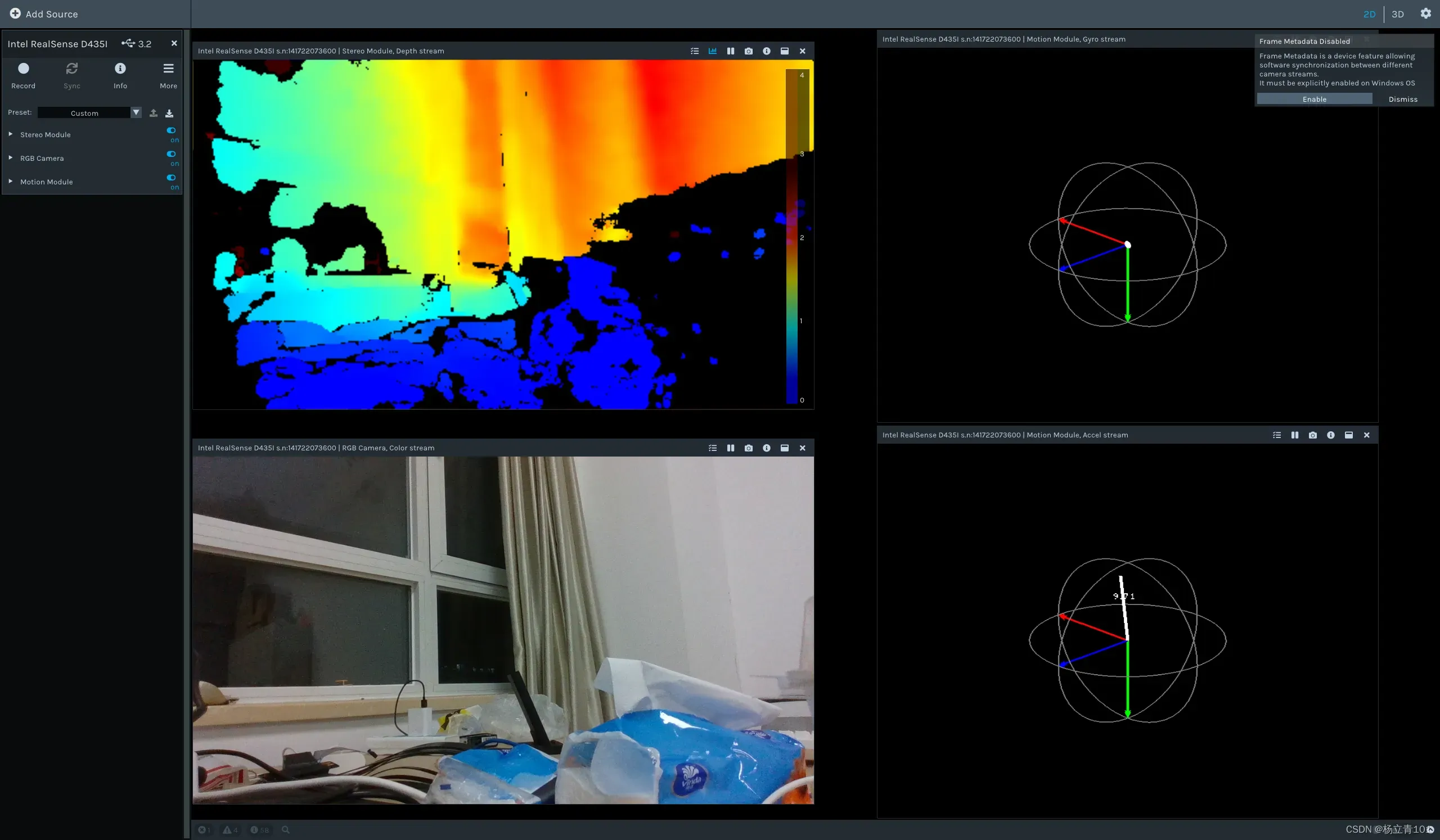
打开Intel® RealSense™ Viewer,再打开它的左上角的按钮,分别是:深度、RGB相机,

完成上述的操作之后即可看到已经彩色化的深度图和RGB图像了。
3.使用D435i读取保存各类图片实战
上述虽然已经成功的使用了Intel® RealSense™ Viewer查看到我们的图像,但是在一些开发的过程中还需要对各类的图像保存,这里我们提供python版本的代码实现图像的读取和保存。注意下方的代码和Intel® RealSense™ Viewer不能同时使用。
代码中关键参数的解析;
图像保存路径,根据需要修改:
folder = "C:/Users/86150/Desktop/D435i/ouput/"
将深度图转为伪彩色图,通过alpha调节图片颜色:
# 将深度图转化为伪彩色图方便观看
depth_colormap = cv2.applyColorMap\
(cv2.convertScaleAbs(depth_frame, alpha=0.008)
, cv2.COLORMAP_JET)
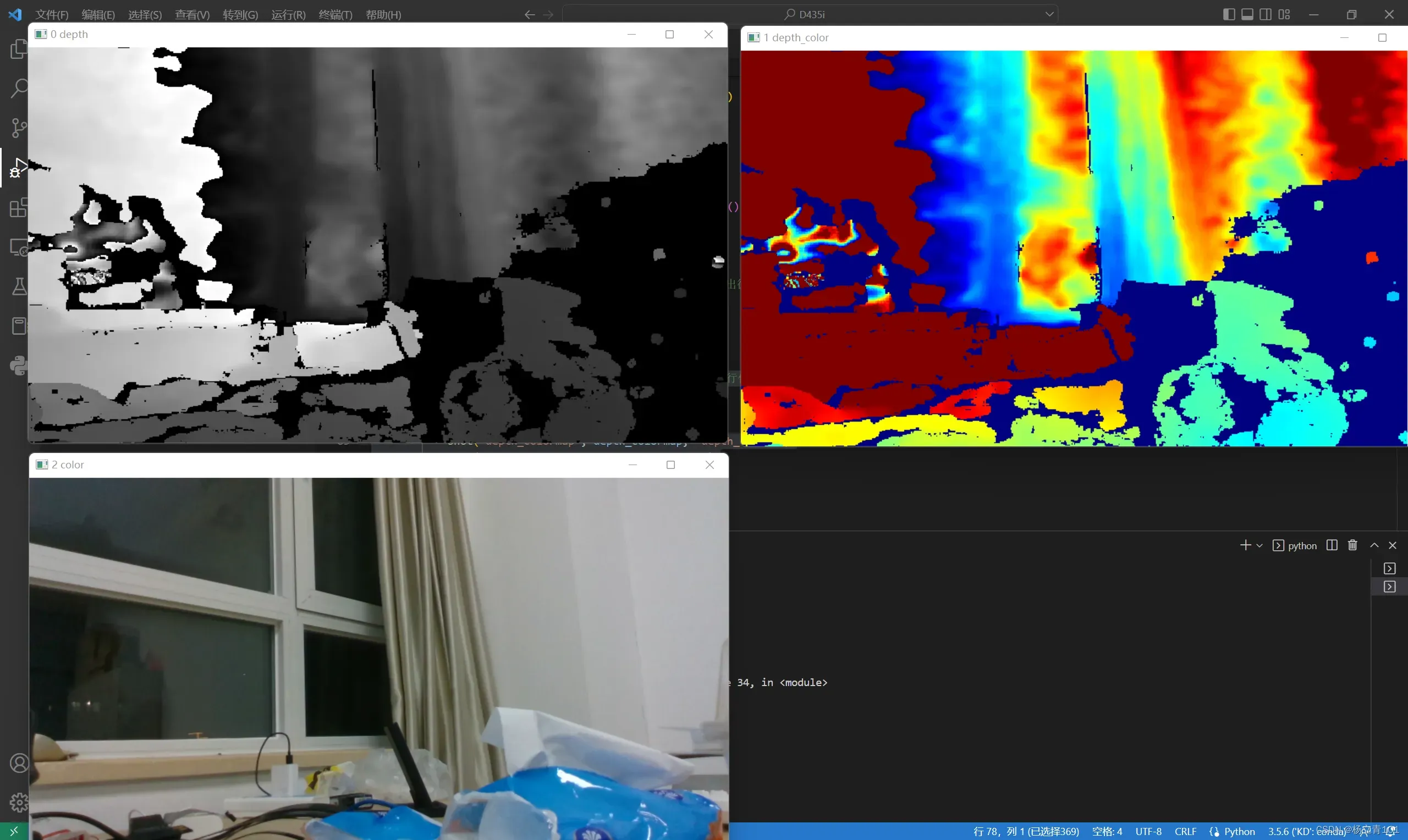
cv2.imshow('1 depth_color', depth_colormap)
按下键盘上的按键“t”,保存我们需要的图片,这里我们保存的是彩色RGB、伪彩色深度图、深度图三种:
代码shot('color_shot', color_frame, 'color/')表示将彩色图片保存到 "C:/Users/86150/Desktop/D435i/ouput/"下的color文件夹下面。
if c == ord('t'):
# 默认保存五张图片,如果不需要保存某图像把对应那行代码注释掉即可
# shot('left_shot', left_frame)
# shot('right_shot', right_frame)
shot('color_shot', color_frame, 'color/')
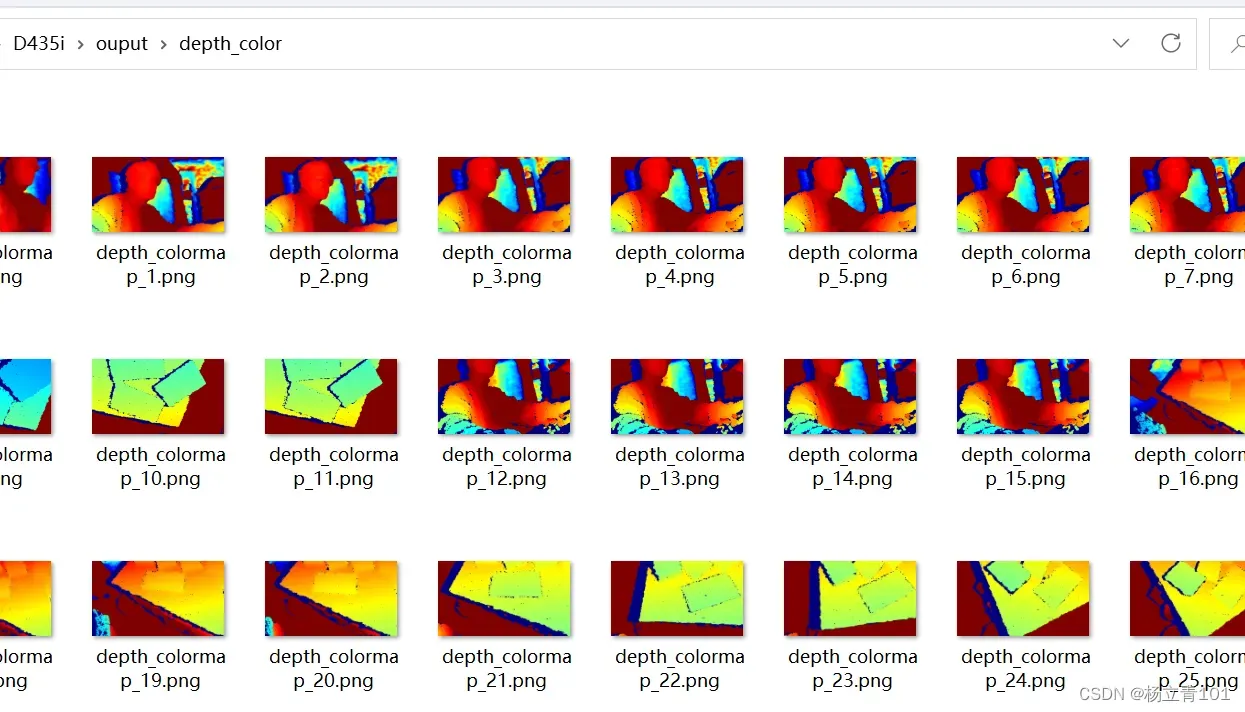
shot('depth_colormap', depth_colormap, 'depth_color/')
shot('depth_frame', depth_frame, 'depth/')
counter += 1
保存的图片如下图所示:
运行结果如下,可以达到和Intel® RealSense™ Viewer相同的效果:
完整代码如下:
import pyrealsense2 as rs
import numpy as np
import cv2
counter = 0
# 若要保存到其他文件夹,修改此路径
folder = "C:/Users/86150/Desktop/D435i/ouput/"
def shot(pos, frame, img):
global counter
path = folder + img + pos + "_" + str(counter) + ".png"
cv2.imwrite(path, frame)
print("snapshot saved into: " + path)
pipeline = rs.pipeline()
config = rs.config()
# 配置深度和颜色流
# 10、15或者30可选,20或者25会报错,其他帧率未尝试
# 配置颜色相机
config.enable_stream(rs.stream.color, 848, 480, rs.format.bgr8, 15)
# 配置红外相机
config.enable_stream(rs.stream.infrared, 1, 848, 480, rs.format.y8, 15)
config.enable_stream(rs.stream.infrared, 2, 848, 480, rs.format.y8, 15)
# 配置深度图像
config.enable_stream(rs.stream.depth, 848, 480, rs.format.z16, 15)
# Start streaming
profile = pipeline.start(config)
# 创建对齐对象, rs.align 允许我们将深度帧与其他帧对齐, "align_to" 是计划对其深度帧的流类型
align_to = rs.stream.color
align = rs.align(align_to)
try:
while True:
frames = pipeline.wait_for_frames()
# 将深度框与颜色框对齐
aligned_frames = align.process(frames)
# 获取对齐帧
aligned_depth_frame = aligned_frames.get_depth_frame()
if not aligned_depth_frame:
continue
# depth_frame
depth_frame = 50*np.asanyarray(aligned_depth_frame.get_data())
cv2.imshow('0 depth', depth_frame)
# 将深度图转化为伪彩色图方便观看
depth_colormap = cv2.applyColorMap\
(cv2.convertScaleAbs(depth_frame, alpha=0.008)
, cv2.COLORMAP_JET)
cv2.imshow('1 depth_color', depth_colormap)
# color frames
color_frame = aligned_frames.get_color_frame()
if not color_frame:
continue
color_frame = np.asanyarray(color_frame.get_data())
cv2.imshow('2 color', color_frame)
# left frames
left_frame = frames.get_infrared_frame(1)
if not left_frame:
continue
left_frame = np.asanyarray(left_frame.get_data())
# cv2.imshow('3 left_frame', left_frame)
# right frames
right_frame = frames.get_infrared_frame(2)
if not right_frame:
continue
right_frame = np.asanyarray(right_frame.get_data())
# cv2.imshow('4 right_frame', right_frame)
c = cv2.waitKey(1)
# 如果按下ESC则关闭窗口(ESC的ascii码为27),同时跳出循环
if c == 27:
cv2.destroyAllWindows()
break
if c == ord('t'):
# 默认保存五张图片,如果不需要保存某图像把对应那行代码注释掉即可
# shot('left_shot', left_frame)
# shot('right_shot', right_frame)
shot('color_shot', color_frame, 'color/')
shot('depth_colormap', depth_colormap, 'depth_color/')
shot('depth_frame', depth_frame, 'depth/')
counter += 1
finally:
# Stop streaming
pipeline.stop()
二、Ubuntu16.04下安装D435i
由于项目需要用到C++代码,相比于在Windows上配一套开发环境,在linux下做C++的编程更为简单,在Linux下安装SDK有两种方式,分别是直接命令行安装和源码编译安装,下面将分别介绍:
1.Linux Distribution——命令行安装
对Linux平台的要求:

注册公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
添加repositories(Ubuntu 16 LTS)
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
安装library
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
将上述的命令安装成功之后就可以查看D435i的可视化界面了,如果还需要做一些深度图的开发,那么需要安装debug等装置,安装命令如下:
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
接下来测试我们的相机是否安装成功:
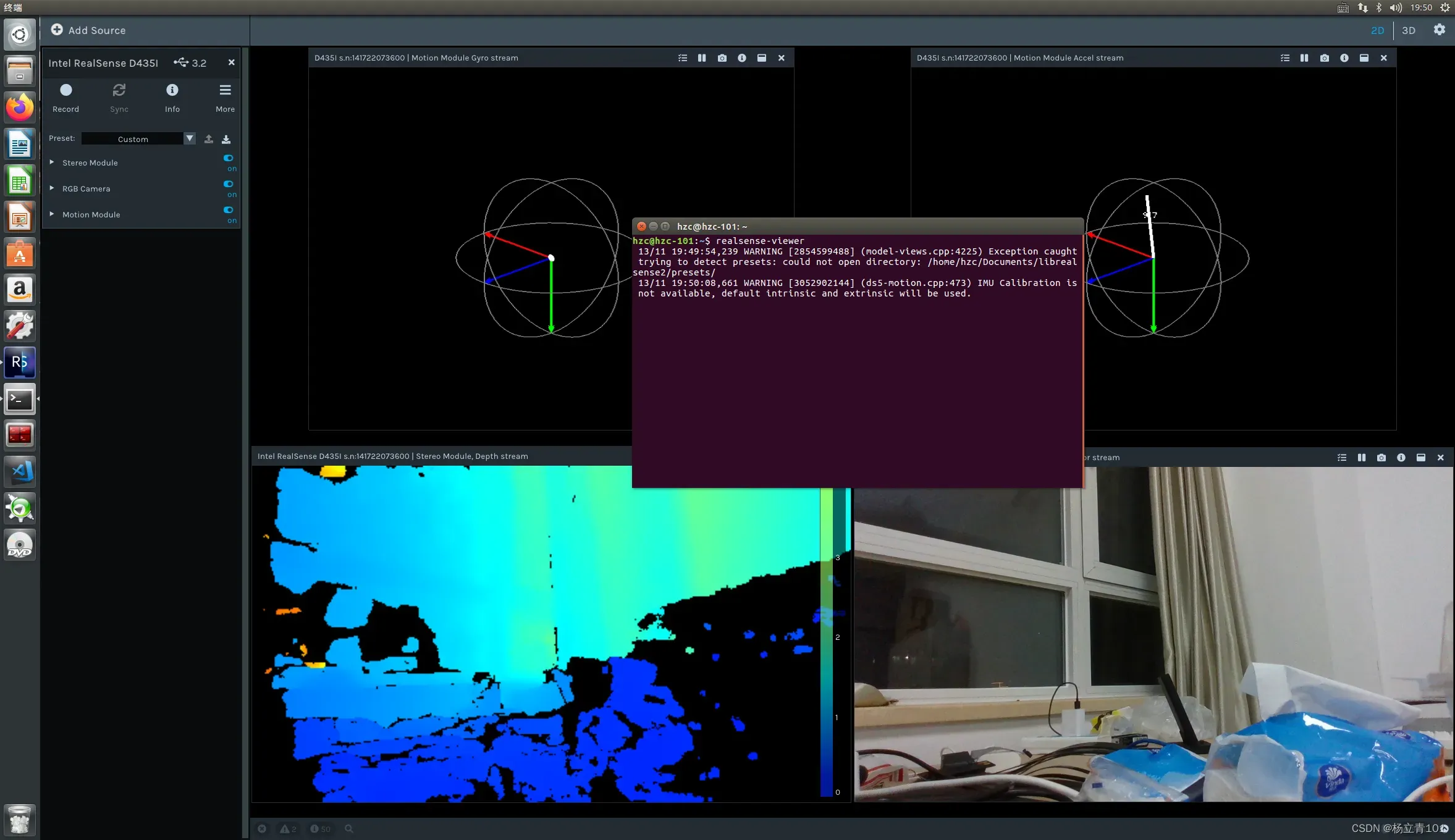
realsense-viewer
得到的界面如下,和Windows下一致:
此外还有一些删除命令安装包的命令:
2.源码安装
下载源码librealsense,注意下载的版本要支持Ubuntu16.04,使用下方的指令安装:
git clone -b v2.50.0 https://github.com/IntelRealSense/librealsense.git
-b v2.50.0指的是2.50.0版本。
更新系统
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
此时注意要断开Ubuntu与D435i的连接,安装下列的依赖:
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
安装内核所需的模块
cd librealsense
./scripts/setup_udev_rules.sh
安装补丁包,耗时很长,耐心等待:
./scripts/patch-realsense-ubuntu-lts.sh
编译和安装:
mkdir build && cd build
cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true
sudo make uninstall && make clean && make -j8 && sudo make install
安装成功后,输入以下指令即可验证是否安装成功:
realsense-viewer
大功告成!!!
文章出处登录后可见!