目录:
机器视觉(十):字符识别

🌏🧐以下为正文🦄🪐
待配准图像与原图像相比存在偏移、旋转、比例等空间变换关系,图像配准就是将不同传感器所采集得到的同一场景的多光谱、多波段或同一传感器在不同时相、不同方位、不同条件下(气候、照度、摄像位置和角度等)获得同一场景的两幅或多幅图像进行匹配的过程。
一、图像配准概述
(一)常用图像变换
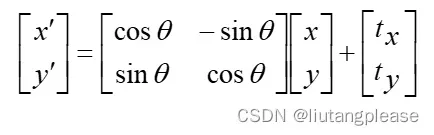
1.刚体变换
一幅图像中的两点间的距离经变换到另一幅图像中后仍然保持不变。
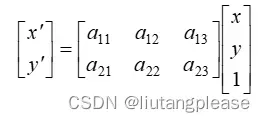
2.仿射变换
一幅图像上的直线经过变换后映射到另一幅图像上仍然为直线,并且保持平行关系。

3.投影变换
一幅图像上的直线经过变换后映射到另一幅图像上仍然为直线,但平行关系基本不保持。
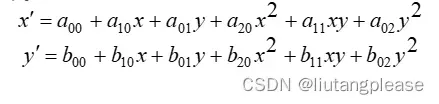
4.非线性变换
一幅图像上的直线映射到另一幅图像上不一定是直线,可能是曲线。

(二)图像配准方法分类
1.基于像素的配准方法
一般根据配准图像的相关函数、Fourier变换等关系式来计算配准参数。其中最简单的方法就是窗口(模板)匹配法。
2.基于特征的配准方法
主要是采用各种算法提取基准图像和实时图像的特征,如边缘、角点、曲率、不变矩等,然后对提取的特征进行描述从而使其可以按照某种相似性测度进行匹配。
3.基于模型的配准方法
根据图像失真的数学模型来对图像进行非线性校正式的配准,多用于医学图像。
二、图像配准方法
(一)基于特征点的配准定位方法
下图中椭圆区域为SIFT特征匹配区域,椭圆的中心位置代表了关键点在图像中的二维坐标位置,椭圆的长轴代表了关键点的尺度,椭圆的方向代表了该关键点的方向。
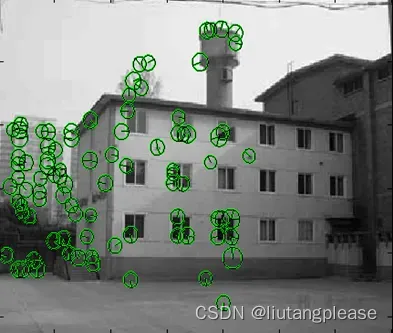 | 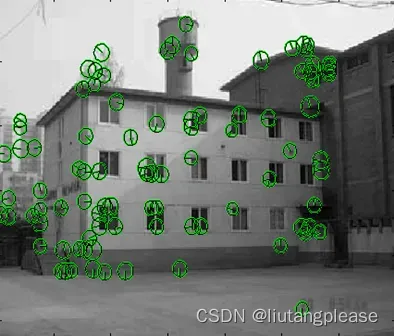 |  |
| SIFT特征提取a | SIFT特征提取b | SIFT特征匹配结果图 |
图像对的匹配点数随着阈值的增加而逐渐减少,但是匹配点更加稳定。SIFT特征是图像的局部特征,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配,并可通过选择适合的阈值,寻找可靠、稳定的特征匹配点。
(二)基于图像矩的配准定位方法
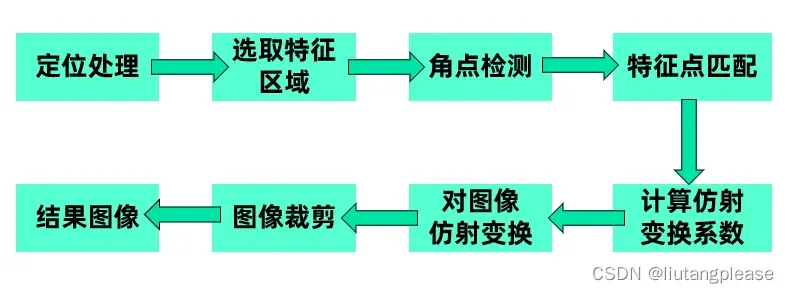
对基准图像和待配准图像进行特征提取预处理,采用质心主轴法完成两幅图像特征之间的匹配,建立图像之间的配准映射关系,利用仿射变换对待配准图像进行图像变换实现图像配准定位。
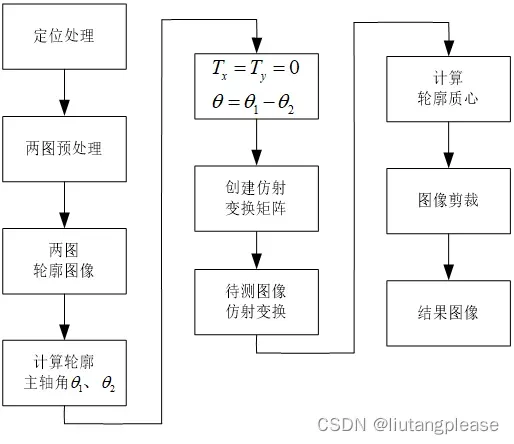
对基准图像和待配准图像分别进行图像处理,经过阈值分割、中值滤波、轮廓提取、轮廓跟踪得到两幅图像的连续完整轮廓;分别针对两个轮廓图像计算出其目标轮廓的主轴,两主轴的夹角即为图像的旋转角。
文章出处登录后可见!