🎉欢迎来到Python专栏~Python控制parrot ARDrone 2.0无人机
- ☆* o(≧▽≦)o *☆嗨~我是小夏与酒🍹
- ✨博客主页:小夏与酒的博客
- 🎈该系列文章专栏:Python学习专栏
- 文章作者技术和水平有限,如果文中出现错误,希望大家能指正🙏
- 📜 欢迎大家关注! ❤️


🎉 目录-Python控制parrot ARDrone 2.0无人机
- 一、前言
- 二、效果演示
- 三、ARDrone 2.0无人机介绍
- 四、环境搭建
- 五、讲解示例代码
- 六、后记

一、前言
本篇文章主要讲解如何使用Python来对parrot ARDrone 2.0无人机进行操作控制。
在网上查找过许多关于ARDrone的SDK资料,但大部都是使用C++来进行开发,有一部分使用Python开发的资料中却没有包含完整且正确的库。为了解析无人机发送的UDP数据信息,我个人觉得使用Python来实现是相对简单的,于是查找了大量的资料之后,终于可以使用Python来控制无人机了!
Python技能树:Python入门技能树。
版本:Python 3.10。
IDE:PyCharm。
二、效果演示
在调试和测试的过程中,我使用PyCharm进行开发:
【Python控制ARDrone 2.0无人机】演示视频
三、ARDrone 2.0无人机介绍
Parrot AR.Drone四轴遥控飞机是世界知名无线通信厂商Parrot出品的高级玩物,与第一产品时隔两年多, Parrot公司研发了2.0版本,即这次数字尾巴收到的AR.Drone 2.0 Power Edition。拥有极高精度的3轴MEMS陀螺仪、3轴加速度计、3轴磁强计、压力传感器和超声波传感器的AR.Drone 2.0,提供了自动起飞、降落、悬停的功能。
ARDrone 2.0无人机的官网和官方提供的sdk获取:ARDrone 2.0。
获取官方的sdk界面:
目前项目中使用的ARDrone 2.0无人机整体展示:

去除保护外壳的正面和背面:


四、环境搭建
一开始选择使用Python来进行开发,就是因为Python有着强大的编程生态,能极大地提高开发效率。
开发中主要使用的库是:pyardrone。需要先获取到这个库,才可以轻松地开发无人机。
如果你当前的环境比较好的话,直接使用pip下载:
pip install pyardrone
或者
pip3 install pyardrone
📜当然了,为了提高下载速度和下载成功率,还是需要使用国内镜像源下载:
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pyardrone
或者
pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple pyardrone
尝试过很多的方法,从github上看了好多大佬项目中的pyardrone包,都存在代码不完整且有错误的情况。上述pyardrone的安装方法是目前最OK的。
五、讲解示例代码
下面展示基本的示例代码,连接无人机的WIFI,控制无人机飞到1m的高度,悬停一段时间后降落:
from pyardrone import ARDrone
def fly_to_height(target_height):
drone = ARDrone()
if not drone.connected:
drone.connect()
# 根据目标高度执行相应操作
drone.takeoff()
drone.move(target_height)
# 其他飞行操作
drone.hover()
drone.land()
if drone.connected:
drone.disconnect()
# 主程序入口
if __name__ == "__main__":
target_height = 1 # 设置目标高度为1
fly_to_height(target_height)
定义了一个控制飞机飞到固定高度、悬停一段时间并降落的函数:
def fly_to_height(target_height):
drone = ARDrone()
if not drone.connected:
drone.connect()
# 根据目标高度执行相应操作
drone.takeoff()
drone.move(target_height)
# 其他飞行操作
drone.hover()
drone.land()
if drone.connected:
drone.disconnect()
上述代码即能实现对无人机的简单控制。
同时,在pyardrone中,包含了UDP的ip地址和端口配置:
class ARDroneBase(BaseClient):
def __init__(
self,
*,
host='192.168.1.1',
at_port=5556,
navdata_port=5554,
video_port=5555,
watchdog_interval=0.5,
timeout=0.01,
bind=True,
connect=True
):
self.host = host
self.at_port = at_port
self.navdata_port = navdata_port
self.video_port = video_port
self.watchdog_interval = watchdog_interval
self.timeout = timeout
self.bind = bind
if connect:
self.connect()
...
对控制最有用的代码如下,包括起飞、降落、升高和悬停等:
class HelperMixin:
def takeoff(self):
'''
Sends the takeoff command.
'''
self.send(at.REF(at.REF.input.start))
def land(self):
'''
Sends the land command.
'''
self.send(at.REF())
def emergency(self):
'''
Sends the emergency command.
'''
self.send(at.REF(at.REF.input.select))
def _move(self, roll=0, pitch=0, gaz=0, yaw=0):
'''
Same as sending :py:class:`~pyardrone.at.PCMD` command with progressive
flag.
'''
self.send(at.PCMD(at.PCMD.flag.progressive, roll, pitch, gaz, yaw))
def move(
self, *,
forward=0, backward=0,
left=0, right=0,
up=0, down=0,
cw=0, ccw=0):
'''
Moves the drone.
To move the drone forward at 0.8x speed:
>>> drone.move(forward=0.8)
To move the drone right at 0.5x speed and upward at full speed:
>>> drone.move(right=0.5, up=1)
To rotate clockwise at 0.7x speed:
>>> drone.move(cw=0.7)
:param forward: speed for moving forward
:param backward: speed for moving backward
:param left: speed for moving left
:param right: speed for moving right
:param up: speed for moving up
:param down: speed for moving down
:param cw: speed for rotating clockwise
:param ccw: speed for rotating counter-clockwise
'''
self._move(
roll=right-left,
pitch=backward-forward,
gaz=up-down,
yaw=cw-ccw
)
def hover(self):
'''
Sends the hover command.
'''
self.send(at.PCMD(flag=0))
其中,向无人机发送控制指令的部分如下:
class ARDroneBase(BaseClient):
...
def send(self, command):
'''
:param ~pyardrone.at.base.ATCommand command: command to send
Sends the command to the drone,
with an internal increasing sequence number.
this method is thread-safe.
'''
self.at_client.send(command)
...
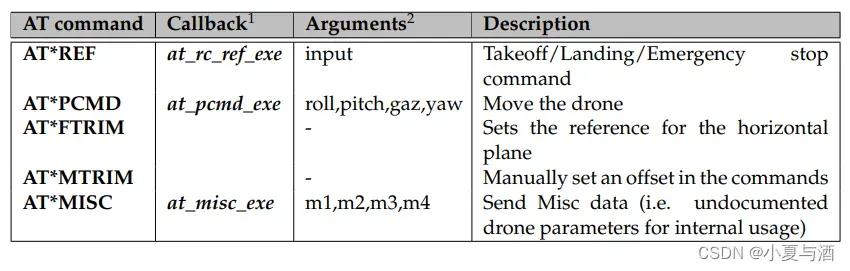
对于向无人机发送的具体指令,可以参考官方提供的sdk手册(AT Commands部分),或者从pyardrone.at中查看。手册中的部分AT指令展示如下:
除了上述内容之外,pyardrone中还提供了opencv(cv2)相关的开发,部分展示如下:
# import VideoMixin only if opencv is available
try:
import cv2
except ImportError:
class DummyVideoMixin:
pass
VideoMixin = DummyVideoMixin
VIDEO = False
else:
del cv2
from pyardrone.video import VideoMixin
VIDEO = True
六、后记
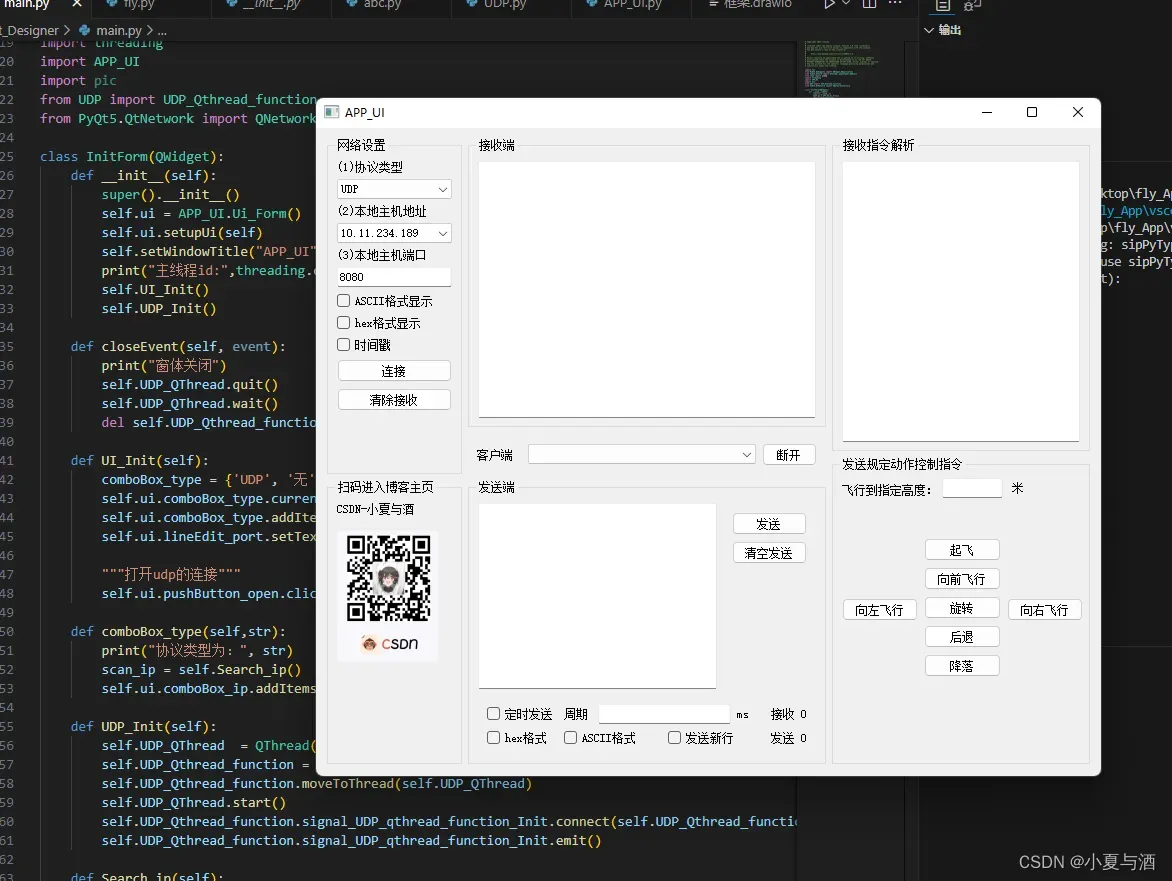
使用Python开发ARDrone 2.0无人机,同时还便于使用PyQt5开发对应的UI操作界面,界面部分展示如下(未完工):

🧸结尾
- ❤️ 感谢您的支持和鼓励! 😊🙏
- 📜您可能感兴趣的内容:
- 【Python】Python实现串口通信(Python+Stm32)
- 【FPGA】串口通信讲解-状态机判断数据值
- 【Arduino TinyGo】【最新】使用Go语言编写Arduino-环境搭建和点亮LED灯
- 【全网首发开源教程】【Labview机器人仿真与控制】Labview与Solidworks多路支配关系-四足爬行机器人仿真与控制

Tips
- 您发布的文章将会展示至 里程碑专区 ,您也可以在 专区 内查看其他创作者的纪念日文章
- 优质的纪念文章将会获得神秘打赏哦
文章出处登录后可见!