实战篇:粘连物体分割——利用角点检测、定ROI区域、透视变换、几何分割实现瓶盖分割计数
- 一、背景
- 二、思路
- 三、代码
- 四、效果
- 五、声明
- 六、 其他文章
一、背景
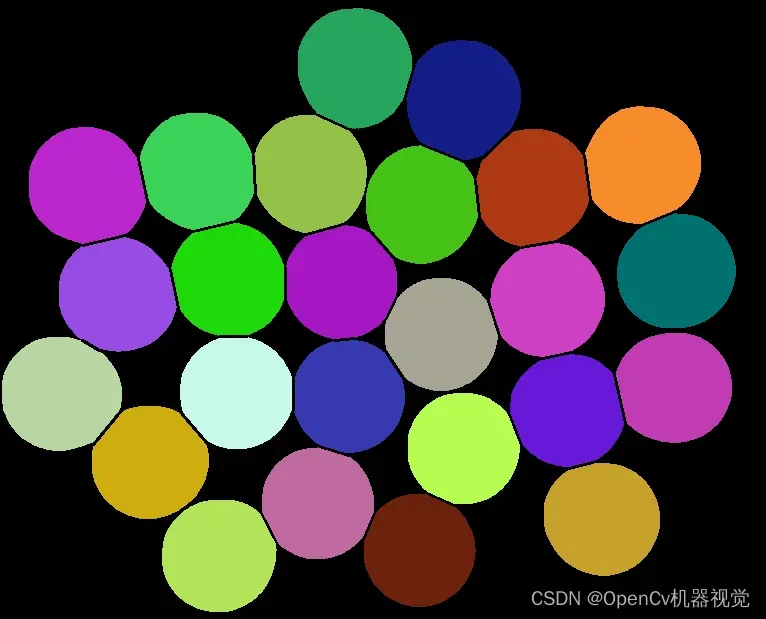
在去年学习opencv的过程当中,做过一张瓶盖分割的练习。目的就是为了分割出每个瓶盖,当时想着,除了霍夫圆检测思路之外,能不能根据相连瓶盖的特征进行分割呢?于是便想到了根据角点检测其相连位置,然后在相连位置之间画一根线进行切除。是不是想法很单纯,觉得很好实现?其实实现过程中遇到不少问题,检测的角点很多,如何过滤掉剩下粘连处的角点?那么多个角点,如何保证点跟另一个点刚好是相连位置的两个点?下面附上代码的整体实现思路,本次文章制作简单的分享,后续有时间会更新,逐步简洁实现流程以及原理。

二、思路
一、基于****Harrs****的角点检测
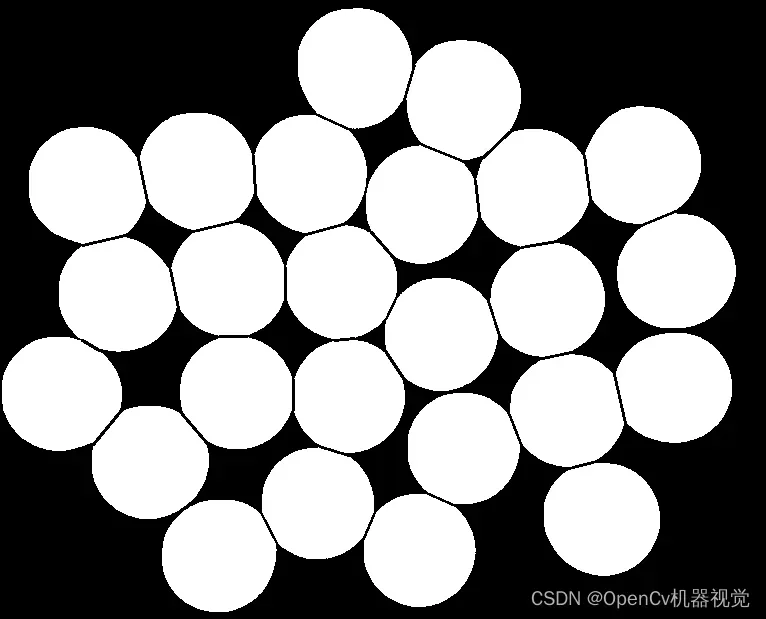
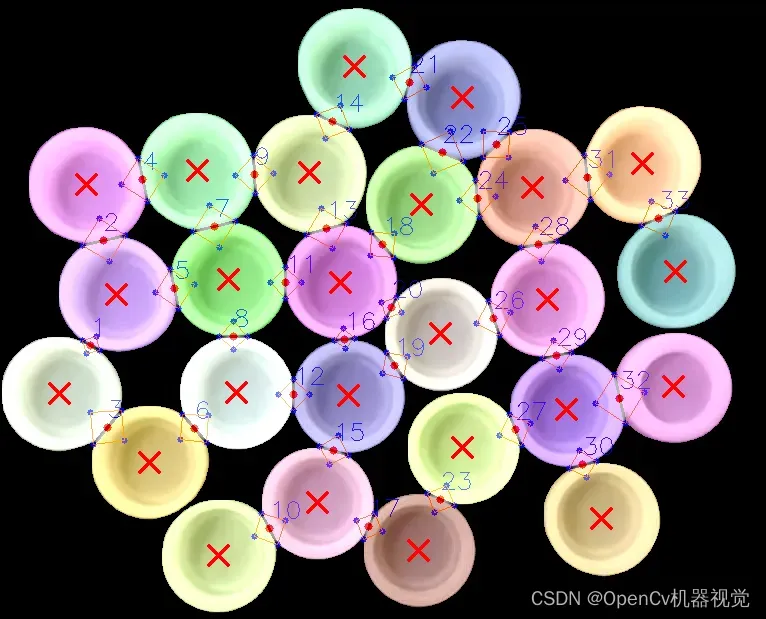
圆形相粘物体之间会存在凹凸区域、可以通过对相连区域进行角点检测、或者凹凸点检测。检测点是否齐全决定分割的准确度。为了保证分割效果,角点检测阶段经可能检测多一些角点。
二、均值去噪点
对所有点求最近点求最小欧式距离,通过对距离进行求均值以及中位数。其中均值指标适用于杂点较多以及距离较大的情况。对于杂点较多,距离较大的情况。通过均值指标或者中位数指标能去掉部分杂点。
三、ROI取样
为了更进一步筛选掉部分杂点,以及更好第判断两点之间是否为物体相连部分,因为通过相连部分的两个角点,进行旋转90°获得一个正方向的ROI区域,假设ROI区域为相连部分,其ROI区域中的填充率较大。因此利用本特征进行ROI取样。其中只有正方形ROI才能更好地衡量其填充率。
四、坐标变换
在对图像坐标进行运算的时候,需要进行坐标变换,将坐标原点移动到图像的中心。
五、旋转矩阵获取
对获取到两个角点,通过坐标变换、旋转矩阵的获取,使图像中任意点能绕一点进行旋转一定角度。
六、透视变换
因为需要计算填充率需要进行透视变换,求ROI轮廓面积与ROI面积之比,因为不同四边形的角度不一样,所以需要对所有点进行排序,同时又一种特殊情况就是四边形对角线如果是竖直的情况,则不需要及进行排序,不然会出现矫正错误。
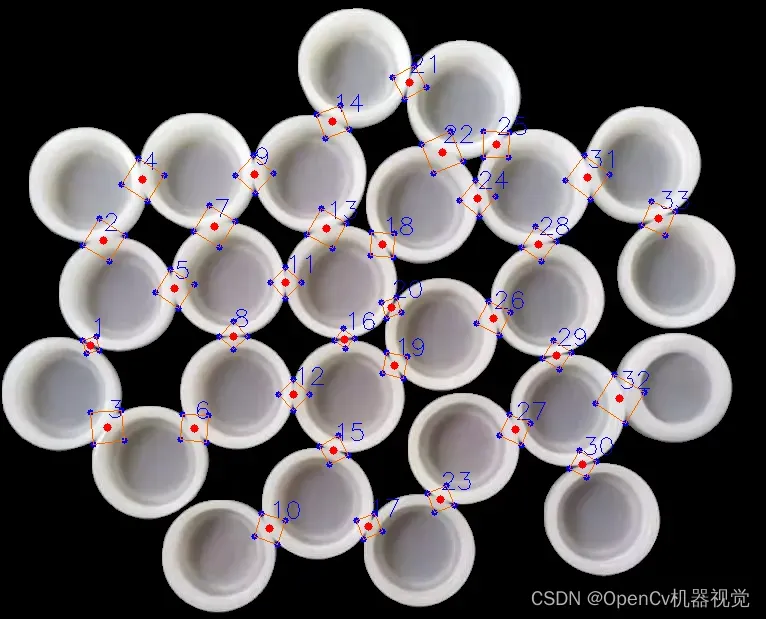
七、填充率计算
通过取样的ROI进行计算二值化轮廓面积与ROI面积之比,获取填充率,设定一个值,假如大于阈值,就进行分割。
三、代码
将下面代码放在.py文件当中,读取图片,运行之后,便会在当前路径自动创建文件夹将所有图片保存里面。
"""
作者:冯耿鑫
时间:2021/1/9
功能:对相连的圆形物体进行分割
思路:
=>>创新:形态学操作的小技巧可以定义一个卷积核、然后在本卷积核上画圆,就是一个圆形的卷积了
=>>基于Harris角点检测、得出dist图像,因为再拐角处会有很多个角点,为了只求一个,所以进行二值化,膨胀,求拐点的形心。
=>>对角点进行x方向的排序
=>>进行坐标变换、以及旋转矩阵求出垂直的另一条直线
=>>进行透视变换,矫正ROI区域,需要通过透视变换来求得,其中ROI的透视变换用到了坐标排序,其中需要注意一种对角线竖直的情况,然后求包含物体的饱和率,从而进行筛选。
=>>利用连通域进行颜色显示
"""
# -*- coding:utf-8 -*-
import cv2 as cv
import numpy as np
import cv2
import math
import os
class SegmentationConnectObject(object):
def __init__(self,img,binary):
self.img = img # 原图
self.binary = binary # 二值化图片
self.number = 0 # 第几个轮廓
self.answer = False # 一开始默认是不是相连的
self.H,self.W,self.C = img.shape
# 寻找距离最小的两个点
def main_find_mindist_points(self):
"""
:function: 用来寻找两个最近的点,用来进行区域分析
:return:
"""
"""=>>圆形卷积核进行形态学操作,消除杂点噪声、以及光滑变换<<="""
k2 = np.zeros((24, 24), np.uint8) # <==定义一个卷24x24的卷积核
cv2.circle(k2, (12, 12), 12, (1, 1, 1), -1, cv2.LINE_AA) # <==在这个卷积核上进行画一个鹃形的卷积核
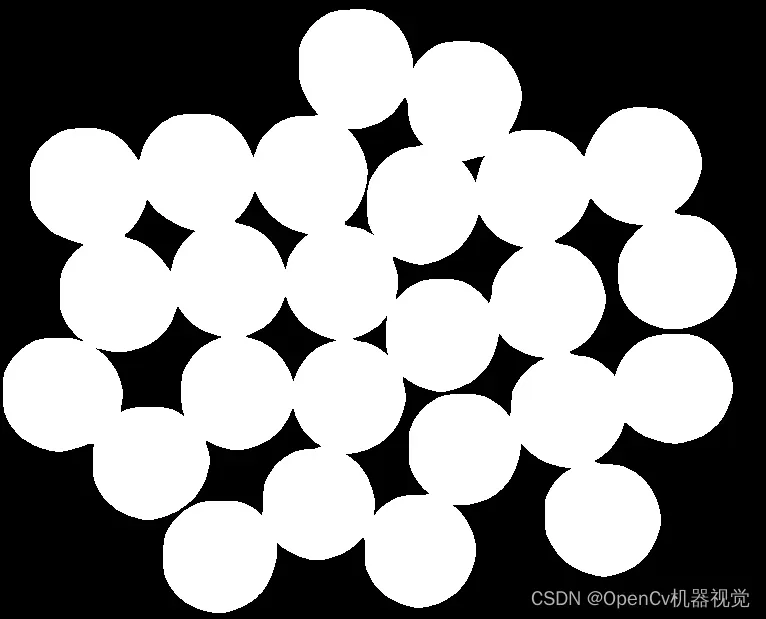
open = cv.morphologyEx(self.binary, cv.MORPH_OPEN, k2) # 进行开操作,也就是先腐蚀后膨胀
"""=>>利用Harris进行角点检测<<= """
harris = cv2.cornerHarris(open, 2, 5, 0.04) #<== 进行角点检测,blockSize:角点检测中要考虑的领域大小||ksize - Sobel:求导中使用的窗口大小||k - Harris:角点检测方程中的自由参数, 取值参数为[0, 04, 0.06]
harris = cv2.dilate(harris, None) # 对角点进行一个简单的膨胀、不然的话轮廓会不好寻找
# img[harris > 0.2 * harris.max()] = [0, 0, 255] #<== 通过角点检测之后只有边缘像素是有值的,拐角的地方是比较大,所以利用这个条件进行显示
pix_max = 0.2 * harris.max() # <==获取选择角点的阈值
ret, binary_p = cv.threshold(harris, pix_max, 255, cv.THRESH_BINARY) # 因为选择出来的像素太多了,又类似与轮廓,所以我们直接进行阈值分割发现轮廓
binary_p = np.uint8(binary_p) # 二值化前需要对位数进行转换
contours = cv2.findContours(binary_p, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)[0] # 发现角点的轮廓,用来发现其角点的质心
"""=>>找到所有的可能坐标点<<= """
points = [] # 用来储存所有的角点坐标
for c in contours: # 横向
# 获取矩形框的四个参数
mm = cv.moments(c) # 几何重心的获取
cx, cy = int(mm['m10'] / mm['m00']), int(mm['m01'] / mm['m00'])
points.append((int(cx), int(cy))) # 将坐标保留在points列表中
cv.circle(self.img, (int(cx), int(cy)), 3, (0, 0, 255), -1)
"""=>>对所有的角点排序,方向为x从小到大<<= """
points_sorted_x = self.sort_x(points)
# for i, p in enumerate(points_sorted_x):
# cv.circle(self.img, p, 4, (255, 0, 0), -1) # 画出点
# cv.putText(self.img,str(i) , p, cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 100, 255), 2)
"""=>>因为有很多角点,如何获得最小相连的两个点呢,通过遍历所有点,获取最小距离用来求平均值,用来作为指标作为阈值,筛选太远的点<<= """
points_sorted_x_2 = points_sorted_x.copy() # 因为要遍历两次,所以赋值一份方便后面更改
distance_1 = [] # 所有点都进行遍历、储存每个点相连做近的点
for p1 in points_sorted_x: # p1作为父点
x1, y1 = p1 # p1的坐标
distance_2 = [] # 用来储存所有子点p2到p1的距离,然后获取最小距离给diatance_1
for p2 in points_sorted_x_2: # p2作为父点
x2, y2 = p2 # p2的坐标
if x1 == x2 and y1 == y2: # 因为两个列表是一样的,所以会有遇到相同的点,需要跳过,不然distance_2中最小的都是0
continue # 循环到原来的带点就不进行计算
else:
l = pow(abs(x1 - x2) ** 2 + abs(y1 - y2) ** 2, 0.5) # 计算父点与子点的欧式距离
distance_2.append(l) # 将所有欧式距离保存在distance_2中
distance_1.append(min(distance_2)) # 获取每个父点到子点的最小欧式距离
mean_dist = np.mean(distance_1) # 这里设置了两个指标,一个是平均值,适合密集点
median_dist = np.median(distance_1) # 一个是中间数,适合杂点较少情况
"""=>>上面根据模型求出距离指标,下面将通过设定阈值进行求解<<= """
choose = [] # choose列表使用来记录已经检测完毕的两个点,用来判断,如果没有检测成功,就继续检测,如果检测成功,那就跳过避免重复检测
for number, p1 in enumerate(points_sorted_x): # 遍历父点
x1, y1 = p1 # 父点坐标
for p2 in points_sorted_x: # 遍历子点
x2, y2 = p2 # 子点坐标
if x1 == x2 and y1 == y2: # 过滤相同的点
continue
else: # 求欧式距离
l = pow(abs(x1 - x2) ** 2 + abs(y1 - y2) ** 2, 0.5)
if l > mean_dist * 0.3 and l < mean_dist * 1.6: #<<== 设定约束条件,如果在这个阈值范围就可以进行后续的分割功能
if p1 in choose or p2 in choose: # 如果点在choose中就代表这两个点已经检测成功
continue
self.check_connect(x1, y1, x2, y2) #<<==判断是否连接函数
if self.answer: # 当分割成功的时候,用来记录p1,p2这两个点
choose.append(p1)
choose.append(p2)
self.answer = False # 需要重新赋值,不然边True之后就会一直默认正确
color,result = self.connect_domain()
return self.img,self.binary, open,color,result
# 冒泡排序对角点坐标进行排序
def sort_x(self,points):
"""
function:冒泡排序算法实现对x方向进行排序
"""
l = len(points)
for i in range(l - 1):
for j in range(l - 1 - i):
# if points[j][1]>points[j+1][1]:
# temp = points[j]
# points[j] = points[j+1]
# points[j+1] = temp
if points[j][0] > points[j + 1][0]:
temp = points[j]
points[j] = points[j + 1]
points[j + 1] = temp
return points
# 通过旋转矩阵,实现任一点的旋转
def rota(self,x1, y1, x2, y2):
"""
:function:以任意点为中线,通过坐标平移,然后通过旋转,再平移回来,最终完成旋转。
:return:
"""
# 获取直线的中点
cx, cy = (x1 + x2) / 2, (y1 + y2) / 2
# 偏移矩阵
C = np.array([[cx], [cy]])
# 旋转角度
degree = math.radians(90)
# 旋转矩阵
A = np.array([[math.cos(degree), -math.sin(degree)],
[math.sin(degree), math.cos(degree)]])
# 输入坐标
X1 = np.array([[x1], [y1]])
X2 = np.array([[x2], [y2]])
# 进行偏移,将中间点转换为中间坐标
X1 = X1 - C
X2 = X2 - C
# 利用矩阵的乘积求出旋转坐标
Y1 = np.dot(A, X1)
Y2 = np.dot(A, X2)
# 转换绝对坐标的形式
Y1 = Y1 + C
Y2 = Y2 + C
out_x1, out_y1, out_x2, out_y2 = int(Y1.ravel()[0]), int(Y1.ravel()[1]), int(Y2.ravel()[0]), int(Y2.ravel()[1])
return out_x1, out_y1, out_x2, out_y2
# 检查是否为相连物体
def check_connect(self,x1, y1, x2, y2):
"""
:function:检查这两个点是否为相连接的两个点
"""
"""==>>因为后面需要用到图像坐标的各种运算,所以需要先进行坐标变换<<=="""
x1, y1 = self.change_coordinate_lt_center(x1, y1) # 将第一个点也就是父点转换为笛卡尔坐标系
x2, y2 = self.change_coordinate_lt_center(x2, y2) # 将第二个点也就是子点转换为笛卡尔坐标系
"""==>>进行旋转90°,分别获得父、子的旋转坐标<<=="""
x3, y3, x4, y4 = self.rota(x1, y1, x2, y2) #x3,y3是父点的逆时针旋转点、x4,y4是子点的旋转坐标点
"""==>>转为图像坐标系<<=="""
x1, y1 = self.change_coordinate_center_lt(x1, y1) # 将父点坐标转为图像坐标
x2, y2 = self.change_coordinate_center_lt(x2, y2) # 将子点坐标转为图像坐标
x3, y3 = self.change_coordinate_center_lt(x3, y3) # 将父点坐标旋转坐标转为图像坐标
x4, y4 = self.change_coordinate_center_lt(x4, y4) # 将子点坐标旋转坐标转为图像坐标
"""==>>进行透视变换、因为是倾斜的矩形,必须透视变换,不然的话没办法求比例<<=="""
pts = [(x1, y1), (x3, y3), (x2, y2), (x4, y4)]
"""==>>进行透视变换、因为是倾斜的矩形,必须透视变换,不然的话没办法求比例<<=="""
self.Perspective_transformation(pts)
"""==>>answer表示的是,检测区域为相连接部分,<<=="""
if self.answer:
arrPt = np.array(pts, np.int32).reshape((-1, 1, 2)) # 将坐标转换为n行两列的形式
cv.polylines(img, [arrPt], True, (0, 100, 255), 1)
# 图片坐标系转为笛卡尔坐标系
def change_coordinate_lt_center(self,x_in, y_in):
"""
x_out = x_in-1/2W
y_out = -(y_in-1/2H) = 1/2H-y_in
"""
x_out = x_in - 1 / 2 * self.W
y_out = 1 / 2 * self.H - y_in
return x_out, y_out
# 笛卡尔坐标系转为图片的坐标系
def change_coordinate_center_lt(self,x_in, y_in):
"""
x_out = x_in+1/2W
y_out = -(y_in-1/2H) = 1/2H-y_in =>>y_in = 1/2H-y_out ==>> y_out = 1/2H-yin
"""
x_out = x_in + 1 / 2 * self.W
y_out = 1 / 2 * self.H - y_in
return int(x_out), int(y_out)
def order_points(self,pts):
# initialzie a list of coordinates that will be ordered
# such that the first entry in the list is the top-left,
# the second entry is the top-right, the third is the
# bottom-right, and the fourth is the bottom-left
rect = np.zeros((4, 2), dtype="float32")
# the top-left point will have the smallest sum, whereas
# the bottom-right point will have the largest sum
s = pts.sum(axis=1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# now, compute the difference between the points, the
# top-right point will have the smallest difference,
# whereas the bottom-left will have the largest difference
diff = np.diff(pts, axis=1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
# return the ordered coordinates
return rect
# 进行透视变换
def Perspective_transformation(self,pts):
"""==>>获取四个点的坐标,依次是父点、父点旋转点、子点、子点旋转点、同时对对角线竖直的情况进行单独分析<<=="""
(x1, y1), (x2, y2), (x3, y3), (x4, y4) = pts[0], pts[1], pts[2], pts[3]
pts1 = np.float32(pts) # 透视变换前坐标需要转换为32位
if x1 == x3 or x2 == x4: # 有一张特殊情况,就是对角线是竖直线,这样的经过排序之后就会出现变形,漏检测,
rect = pts1
else:
rect = self.order_points(pts1)
(tl, tr, br, bl) = rect
"""==>>计算ROI区域的长宽<<=="""
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
"""==>>获取变换后图片的坐标点、获得旋转矩阵、同时进行透视变换<<=="""
dst = np.array([[0, 0],[maxWidth - 1, 0],[maxWidth - 1, maxHeight - 1],[0, maxHeight - 1]], dtype="float32") # in the top-left, top-right, bottom-right, and bottom-left
matrix = cv2.getPerspectiveTransform(rect, dst) # 获得旋转矩阵
roi = cv.warpPerspective(self.binary, matrix, (maxHeight, maxWidth)) # 获取roi区域
"""==>>对获取到的目标区域进行面积统计<<=="""
contours = cv2.findContours(roi, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)[0] # 发现最外边轮廓
area_list = [] #定义一个列表用来储存所有的面积
for cnt in contours:
area_list.append(cv.contourArea(cnt))
if len(area_list) == 0:
max_cnts = 0 # 如果区域没有面积,sum会报错,所以需要单独赋值为0
else:
max_cnts = sum(area_list) # 获取面积综合
area = maxWidth * maxHeight # ROI的一个面积
ratio = max_cnts / area # 二值化面积比
if ratio > 0.8:
self.number +=1
cv.circle(self.img, ((x1 + x3) // 2, int(y1 + y3) // 2), 4, (0, 0, 255), -1)
cv.circle(self.img, (x1, y1), 3, (255, 0, 0), -1)
cv.circle(self.img, (x2, y2), 3, (255, 0, 0), -1)
cv.circle(self.img, (x3, y3), 3, (255, 0, 0), -1)
cv.circle(self.img, (x4, y4), 3, (255, 0, 0), -1)
cv.line(self.img, (x1, y1), (x2, y2), (0, 255, 255), 1)
cv.line(self.img, (x3, y3), (x4, y4), (0, 255, 255), 1)
cv.line(self.binary, (x1, y1), (x3, y3), (0, 0, 0), 2)
cv.putText(self.img, str(self.number), ((x1 + x3) // 2, int(y1 + y3) // 2 - 10), cv.FONT_HERSHEY_SIMPLEX, 0.8,(255, 0, 0), 1)
roi_img = cv.warpPerspective(self.img, matrix, (maxHeight, maxWidth))
cv.imwrite(".\\roi\\" +name+"\\"+ str(self.number) + ".png", roi_img)
self.answer = True
def connect_domain(self):
# # 连通域分析
num_labels, labels, stats, centers = cv2.connectedComponentsWithStats(self.binary, connectivity=8)
# 利用连通域进行不同轮廓画出不同颜色
color = np.zeros((self.H, self.W, 3), np.uint8)
for i in range(1, num_labels):
mask = labels == i
color[:, :, 0][mask] = np.random.randint(0, 255)
color[:, :, 1][mask] = np.random.randint(0, 255)
color[:, :, 2][mask] = np.random.randint(0, 255)
result = cv2.addWeighted(img, 0.8, color, 0.5, 0) # 图像权重叠加
for i in range(1, len(centers)):
cv2.drawMarker(result, (int(centers[i][0]), int(centers[i][1])), (0, 0, 255), 1, 20, 2)
return color,result
def get_binary(img):
# 图像预处理
blurred = cv.pyrMeanShiftFiltering(img, 10, 100) # 边缘保留滤波能够进行去噪是同时有效地保留边缘
gray = cv.cvtColor(blurred, cv.COLOR_BGR2GRAY) # 进行灰度化为二值化做准备
ret, binary = cv.threshold(gray, thresh=70, maxval=255, type=cv.THRESH_BINARY) # 固定阈值二值化,将大于thresh得像素点设置为maxval,
return binary
# 创建文件进行图片保存
def make_dir_save_img(path,img, binary,open,color,result ):
if not os.path.exists(name): # 判断是否存在
os.makedirs( name) # 不存在就创建文件夹
if not os.path.exists("roi\\"+name): # 判断是否存在
os.makedirs("roi\\" +name) # 不存在就创建文件夹
cv.imwrite(name+"\\img.png",img)
cv.imwrite(name+"\\binary.png",binary)
cv.imwrite(name+"\\open.png",open)
cv.imwrite(name+"\\color.png",color)
cv.imwrite(name+"\\result.png",result)
if __name__ == '__main__':
path = "001.png"
name = os.path.splitext(path)[0] # 文件名
img = cv.imread(path) # 读取图片
# 获取二值化图片
binary = get_binary(img)
# 创建实例
seg = SegmentationConnectObject(img,binary)
# 调用第一个函数开始执行功能,返回二值化、开操作、黑底颜色、结果、原图
img, binary,open,color,result = seg.main_find_mindist_points()
# 进行图片保存
make_dir_save_img(path,img, binary,open,color,result )
cv.namedWindow("img",0)
cv.imshow("img",img)
cv.namedWindow("binary",0)
cv.imshow("binary",binary)
cv.namedWindow("open",0)
cv.imshow("open",open)
cv.namedWindow("color",0)
cv.imshow("color",color)
cv.namedWindow("result",0)
cv.imshow("result",result)
cv.waitKey(0)
cv.destroyAllWindows()
四、效果
五、声明
- 因为没用同分辨率下的多张瓶盖图片,本代码没进行批量测量,同时因为个人能力有限,算法以及代码都有不少需要地方,本次分享主要为代码分享,后续如果有时间,我会整理,进行每个步骤讲解。谢谢大家的支持,如有问题请评论区留意,大家一起讨论进步!!!
六、 其他文章
1.理论系列:
第一章:pycharm、anaconda、opencv、pytorch、tensorflow、paddlex等环境配置大全总结【图像处理py版本】
第二章:OpenCv算法的基本介绍与应用
第三章:OpenCv图片、视频读写操作与基本应用
第四章:OpenCv阈值分割/二值化(单通道、多通道图片)总结
2.项目系列:
项目一:四六级改卷系统
==》项目二:实战篇:粘连物体分割——利用几何分割实现瓶盖分割检测
项目三:实战篇:粘连物体分割——利用几何分割实现硬币分割检测
项目四:实战篇:粘连物体分割——利用几何分割实现细胞分割检测
项目五:实战篇:粘连物体分割——利用分水岭算法实现糖豆分割检测
文章出处登录后可见!