
开源地址: https://github.com/TexasInstruments/edgeai-yolov5/tree/yolo-pose
导读:
前不久看到一则新闻,YOLO之父Joseph Redmon离开CV界,原因是受不了道德的谴责,该技术已被用在军事和隐私问题上。最近,YOLO又火了,YOLOv7在速度和精度的平衡上达到了最佳水平。而基于YOLOv5的YOLOPose也在人体姿态估计领域取得了端到端领先的性能。本篇记录复现YOLOPose的过程,与代码解读。
目录
一、设置
1.1 克隆仓库,安装依赖库,检查Pytorch和GPU
!git clone https://github.com/ultralytics/yolov5 # clone repo
#YOLO-Pose分支无法克隆,直接下载zip包即可;
%cd edge-yolov5-yolo-pose/
%pip install -r requirements.txt # install dependencies
import torch
from IPython.display import Image, clear_output # to display images
clear_output()
print(f"Setup complete. Using torch {torch.__version__} ({torch.cuda.get_device_properties(0).name if torch.cuda.is_available() else 'CPU'})")
Setup complete. Using torch 1.9.1+cu101 (Tesla V100-SXM2-16GB)
如果pytorch版本不对,会出现下列问题:
AttributeError: ‘Upsample‘ object has no attribute ‘recompute_scale_factor‘
#https://blog.csdn.net/qq_40280673/article/details/125095353
#正确的版本
pip install torch==1.9.1
pip install torchvision==0.10.1
本地conda环境下运行,(pytorch-cifar) wqt@ser2024:edgeai-yolov5-yolo-pose$ pip install torch==1.9.1
二、推理与训练
2. 1 下载训练好的YOLO和YOLOPose模型
(pytorch-cifar) wqt@ser2024:edgeai-yolov5-yolo-pose$ ./weights/download_weights.sh
由于直接打开链接下载,会出现格式错误,这里推荐命令行下载:
wget http://software-dl.ti.com/jacinto7/esd/modelzoo/gplv3/08_02_00_11/edgeai-yolov5/pretrained_models/checkpoints/keypoint/coco/edgeai-yolov5/other/best_models/yolov5s6_640_57p5_84p3_kpts_head_6x_dwconv_3x3_lr_0p01/weights/last.pt
#此处下载Yolov5s6_pose_960
2.2 准备数据
数据集需要准备成YOLO格式,因为数据加载需要同时读取关键点和位置框的信息。有专门的代码库可以产生所需要的格式,见https://github.com/ultralytics/JSON2YOLO 。由于作者已经把coco keypoints转换成所需的格式,直接去下载附件包即可。并且将数据集软连接到所需要文件夹中,文件夹目录如下所示:
edgeai-yolov5
│ README.md
│ ...
│
coco_kpts
│ images
│ annotations
| labels
│ └─────train2017
│ │ └───
| | └───
| | '
| | .
│ └─val2017
| └───
| └───
| .
| .
| train2017.txt
| val2017.txt
软连接可参考如下:
(base) wqt@ser2024:NewProjects$ ln -s ~/Datasets/coco/* coco_kpts
(base) wqt@ser2024:coco_kpts$ rm coco
#即可删除软连接
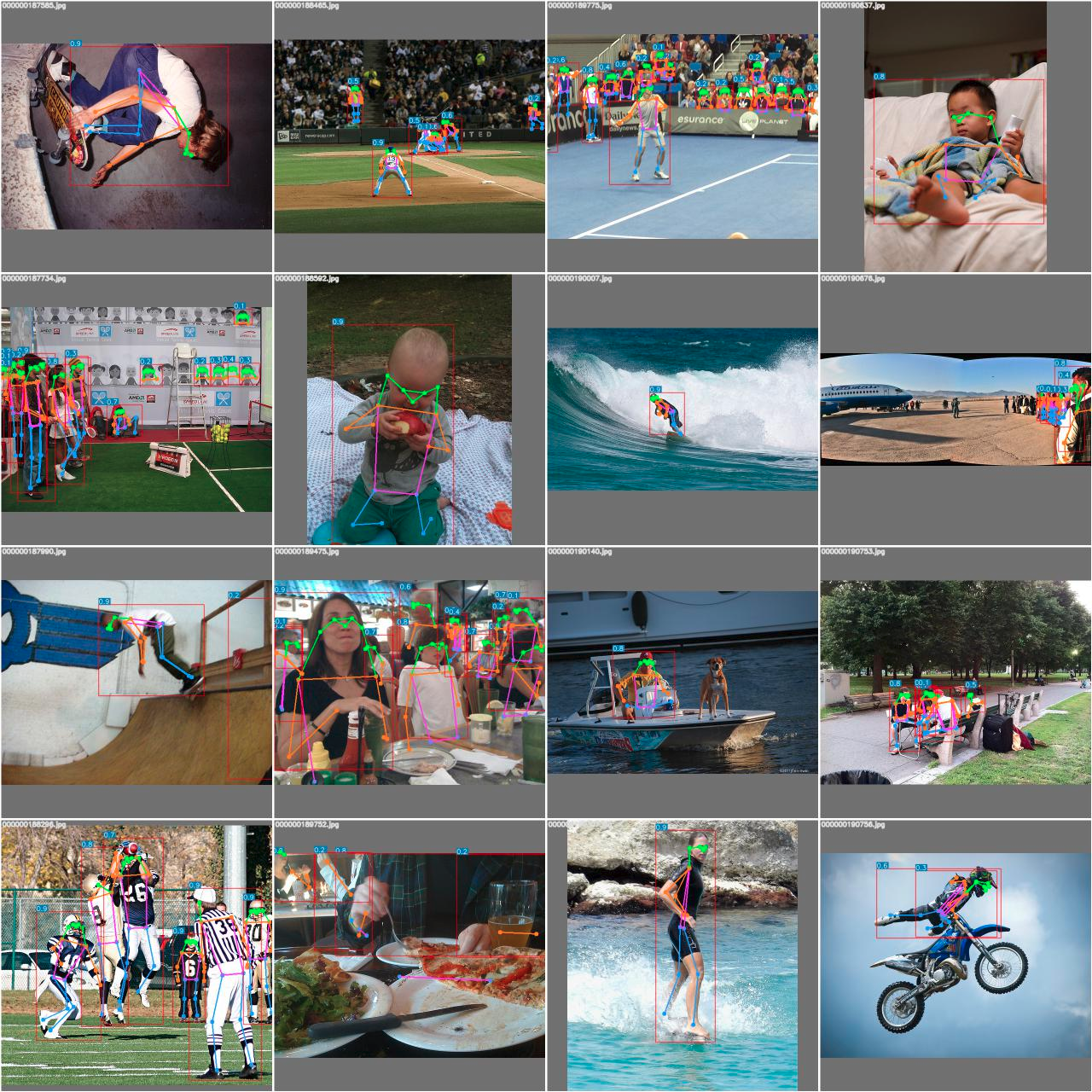
2.3 运行
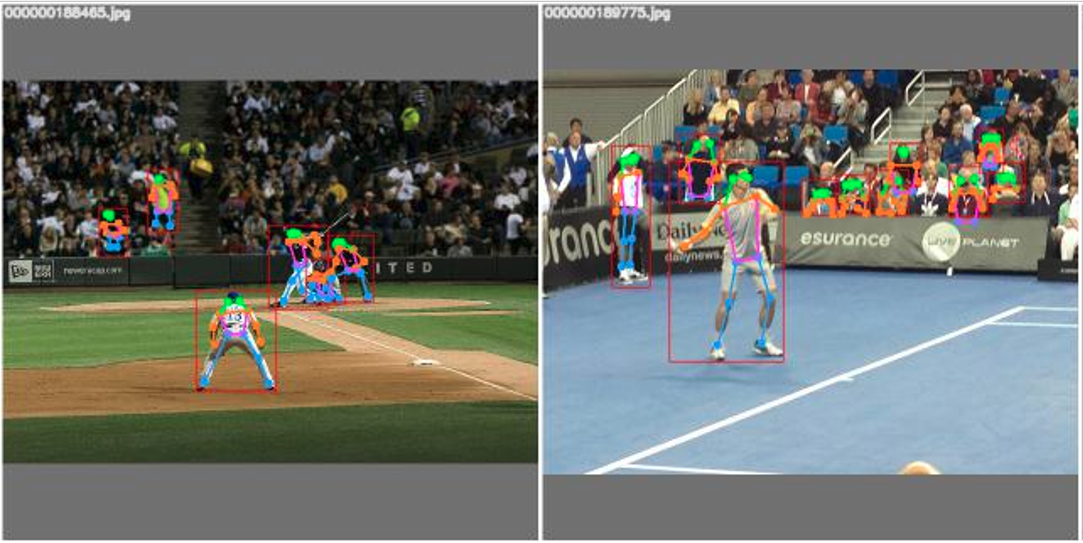
真实标注如下所示:

YOLOPose实测效果,如下图所示:
放大的细节对比:
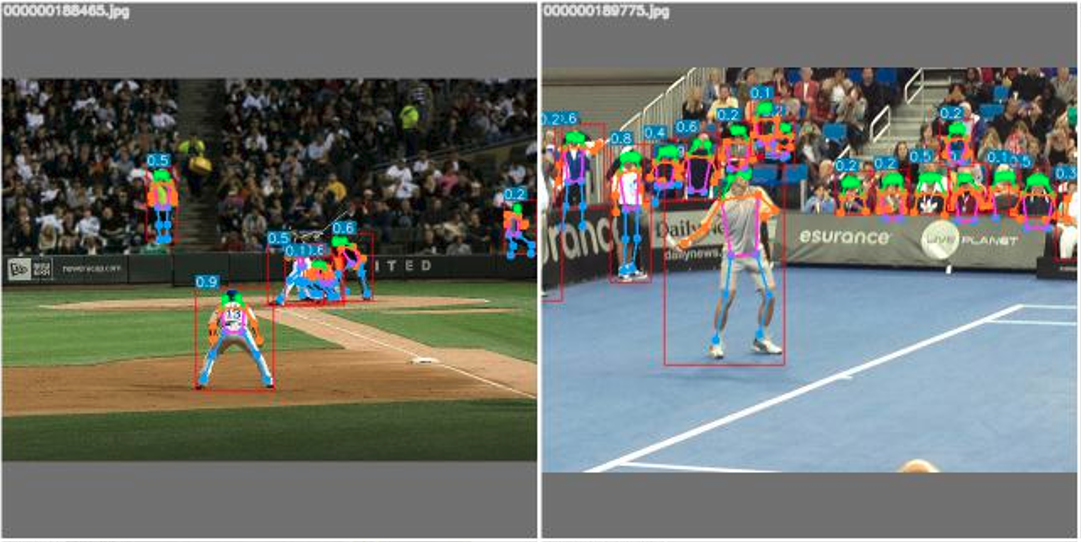
不难发现,YOLOPose在小尺度的人体检测上有亮点(如左图最右边,右图最左边)!
2.4 训练
按照作者提供的训练命令行,可以用两种方式实现训练过程:
python train.py --data coco_kpts.yaml --cfg yolov5s6_kpts.yaml --weights 'path to the pre-trained ckpts' --batch-size 64 --img 960 --kpt-label
其中,‘path to the pre-trained ckpts’ 可以是已经在COCO detection dataset上预训练好的模型,如 yolo5s.pt
也可以通过VSCode(方便调试)在launch.json中设置训练参数如下:
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "Python: Current File",
"type": "python",
"request": "launch",
"program": "${file}",
"console": "integratedTerminal",
"args": [
"--cfg", "yolov5s6_kpts.yaml",
"--batch-size", "16", //default=64,GPU 不夠
"--img", "640", //default = 960, GPU不夠
"--data","coco_kpts.yaml",
"--kpt-label",
// "--weights", "weights/Yolov5s6_pose_960LocalTrain.pt",
"--weights", "weights/Yolov5s6.pt",
// "--iou"," 0.65",
// "--conf", "0.001",
]
}
]
}
开始训练并记录部分训练日志如下:
YOLOv5 2022-6-6 torch 1.9.1+cu102 CUDA:0 (GeForce RTX 2080 SUPER, 7979.1875MB)
Namespace(adam=False, artifact_alias='latest', batch_size=16, bbox_interval=-1, bucket='', cache_images=False, cfg='./models/hub/yolov5s6_kpts.yaml', data='./data/coco_kpts.yaml', device='', entity=None, epochs=300, evolve=False, exist_ok=False, global_rank=-1, hyp='data/hyp.scratch.yaml', image_weights=False, img_size=[640, 640], kpt_label=True, label_smoothing=0.0, linear_lr=False, local_rank=-1, multi_scale=False, name='exp', noautoanchor=False, nosave=False, notest=False, project='runs/train', quad=False, rect=False, resume=False, save_dir='runs/train/exp5', save_period=-1, single_cls=False, sync_bn=False, total_batch_size=16, upload_dataset=False, weights='weights/yolov5s6.pt', workers=8, world_size=1)
tensorboard: Start with 'tensorboard --logdir runs/train', view at http://localhost:6006/
hyperparameters: lr0=0.01, lrf=0.2, momentum=0.937, weight_decay=0.0005, warmup_epochs=3.0, warmup_momentum=0.8, warmup_bias_lr=0.1, box=0.05, kpt=0.1, cls=0.5, cls_pw=1.0, obj=1.0, obj_pw=1.0, iou_t=0.2, anchor_t=4.0, fl_gamma=0.0, hsv_h=0.015, hsv_s=0.7, hsv_v=0.4, degrees=0.0, translate=0.1, scale=0.5, shear=0.0, perspective=0.0, flipud=0.0, fliplr=0.5, mosaic=1.0, mixup=0.0
wandb: Install Weights & Biases for YOLOv5 logging with 'pip install wandb' (recommended)
from n params module arguments
0 -1 1 3520 models.common.Focus [3, 32, 3]
1 -1 1 18560 models.common.Conv [32, 64, 3, 2]
2 -1 1 18816 models.common.C3 [64, 64, 1]
3 -1 1 73984 models.common.Conv [64, 128, 3, 2]
4 -1 1 156928 models.common.C3 [128, 128, 3]
5 -1 1 295424 models.common.Conv [128, 256, 3, 2]
6 -1 1 625152 models.common.C3 [256, 256, 3]
7 -1 1 885504 models.common.Conv [256, 384, 3, 2]
8 -1 1 665856 models.common.C3 [384, 384, 1]
9 -1 1 1770496 models.common.Conv [384, 512, 3, 2]
[3, 5, 7]
10 -1 1 656896 models.common.SPP [512, 512, [3, 5, 7]]
11 -1 1 1182720 models.common.C3 [512, 512, 1, False]
12 -1 1 197376 models.common.Conv [512, 384, 1, 1]
13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
14 [-1, 8] 1 0 models.common.Concat [1]
15 -1 1 813312 models.common.C3 [768, 384, 1, False]
16 -1 1 98816 models.common.Conv [384, 256, 1, 1]
17 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
18 [-1, 6] 1 0 models.common.Concat [1]
19 -1 1 361984 models.common.C3 [512, 256, 1, False]
20 -1 1 33024 models.common.Conv [256, 128, 1, 1]
21 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
22 [-1, 4] 1 0 models.common.Concat [1]
23 -1 1 90880 models.common.C3 [256, 128, 1, False]
24 -1 1 147712 models.common.Conv [128, 128, 3, 2]
25 [-1, 20] 1 0 models.common.Concat [1]
26 -1 1 296448 models.common.C3 [256, 256, 1, False]
27 -1 1 590336 models.common.Conv [256, 256, 3, 2]
28 [-1, 16] 1 0 models.common.Concat [1]
29 -1 1 715008 models.common.C3 [512, 384, 1, False]
30 -1 1 1327872 models.common.Conv [384, 384, 3, 2]
31 [-1, 12] 1 0 models.common.Concat [1]
32 -1 1 1313792 models.common.C3 [768, 512, 1, False]
33 [23, 26, 29, 32] 1 2774444 models.yolo.Detect [1, [[19, 27, 44, 40, 38, 94], [96, 68, 86, 152, 180, 137], [140, 301, 303, 264, 238, 542], [436, 615, 739, 380, 925, 792]], 17, [128, 256, 384, 512]]
Model Summary: 557 layers, 15114860 parameters, 15114860 gradients, 20.5 GFLOPS
Transferred 416/744 items from weights/yolov5s6.pt
Scaled weight_decay = 0.0005
Optimizer groups: 129 .bias, 129 conv.weight, 121 other
train: Scanning '../coco_kpts/train2017.cache' images and labels... 56599 found, 0 missing, 0 empty, 0 corrupted: 100%|█████████████████████████████████████| 1/1 [00:00<?, ?it/s]
val: Scanning '../coco_kpts/val2017.cache' images and labels... 2346 found, 0 missing, 0 empty, 0 corrupted: 100%|██████████████████████████████████████████| 1/1 [00:00<?, ?it/s]
Plotting labels...
autoanchor: Analyzing anchors... anchors/target = 6.48, Best Possible Recall (BPR) = 1.0000
Image sizes 640 train, 640 test
Using 8 dataloader workers
Logging results to runs/train/exp5
Starting training for 300 epochs...
Epoch gpu_mem box obj cls kpt kptv total labels img_size
0/299 5.34G 0.1046 0.1581 0 0.3774 0.01473 0.6549 93 640: 2%|▊ | 78/3538 [00:40<31:19, 1.84it/s]
三、代码解读
3.1 检测器的一般框架

这里描述了目标检测的一般流程图(来自YOLOv4),可以看到一个类人的结构:
- 骨架:通常由CNN网络产生不同颗粒度的特征图;
- Neck:一系列网络层融合特征图;
- Head:消化来自Neck的网络特征,并预测位置框与分类。
3.2 YOLOv5架构

YOLOv5主要有4个版本:s,m,l,x。模型不断增大,精度不断提升,但推理速度下降。
3.2.1 EfficientDet架构
这里作者与EfficientDet方法进行了对比,我们也可以了解下EfficientDet架构的一些特点:

EfficientDet架构三层特点如下:
- Backbone:采用EfficientNet作为基础骨架;
- Neck:采用Bi-direction金字塔特征进行交互融合;
- Head:预测分类头+预测位置框头;
当然,很有其他处理方法在每个部件可以选择不同架构的组合。YOLOv5最大的贡献就是组合CV其他领域的突破,并证明作为一个融合体能够提升检测性能。

感谢博主提供的YOLOv5架构图!
3.3 YOLOv5的新特性
相比v4之前的版本,v5的提升有几个方面:
- 输入端:Mosaic数据增强,自适应锚框,自适应图片缩放;
- Backbone:Focus结构,CSP结构
- Neck:PANet,减少了参数量,更快的推理速度和更好的精度。
- Head:采用GIOU_Loss
3.3.1 数据增强
其实,数据增强也是YOLOv4的秘密武器,与其说新架构,不如说是数据增强。数据增强的方式太多了,有机会专门写一篇有关数据增强的方法介绍,可参考roboflow,很好的外文网站,介绍最新的AI技术。


YOLOv5会将数据集传送给一个数据加载器dataloader,它将会在线增强数据,主要方式有:缩放,颜色空间调整和mosaic增强。其中,马赛克增强是将四张照片以随机比例结合成一张。它对于COCO数据集上的小目标检测效果非常好,见上述实测例子。
3.3.2自适应锚框
怎么从图片中找到感兴趣区域?传统的方式是采用滑动窗口去遍历,这将产生大量的冗余候选集,还会增加大量运算量。
在YOLOv3以后,为了检测候选框,网络从一个anchor box列表中计算偏移量来预测候选框位置。

在YOLOv3论文中,作者采用K-means和遗传算法去学习anchor boxes,基于定制数据集的候选框的分布。这对于自定义数据集非常重要,因为候选框的尺度和位置与当前COCO数据集存在很大差异。比较极端的情况就是,长颈鹿的检测框将会很窄很长,而带鱼的检测框很宽很扁。
# parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchors
anchors:
- [116,90, 156,198, 373,326] # P5/32
- [30,61, 62,45, 59,119] # P4/16
- [10,13, 16,30, 33,23] # P3/8
3.3.3 模型配置文件
YOLOv5统一模型配置文件在中,这与DarkNet中的
不一样。主要差别是在
文件中只需要指定不同层,然后将他们乘以块中的层数即可。其配置如下:
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
[-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
3.3.3 CSP骨架
YOLOv4和v5都采用了CSP bottleneck来制定特征, Cross Stage Partial Networks, CSPNet借鉴了DenseNet的思想,为了缓解梯度消失问题,促进特征传播,鼓励重复使用特征,并减少网络参数量。


class BottleneckCSP(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
self.cv4 = Conv(2 * c_, c2, 1, 1)
self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
self.act = nn.ReLU(inplace=True)
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
def forward(self, x):
y1 = self.cv3(self.m(self.cv1(x)))
y2 = self.cv2(x)
return self.cv4(self.act(self.bn(torch.cat((y1, y2), dim=1))))
3.3.4 PANet Neck
YOLOv4和v5都采用了PANet(下图b)方式来聚合特征。

此图来EfficientDet论文,它采用BiFPN方式来融合特征,证明了此结构对于目标检测任务是最好的选择。或者这对于Yolo而言是需要进一步探索的。

3.4 Bounding box损失函数
有关检测框的损失函数,专门有在系列文章中介绍。这里,Yolov5中采用其中的CIOU_Loss做Bounding box的损失函数。

在目标检测的后处理过程中,针对很多目标框的筛选,通常需要nms操作。Yolov4在DIOU_Loss的基础上采用DIOU_nms的方式,而Yolov5中仍然采用加权nms的方式。可以看出,采用DIOU_nms,下方中间箭头的黄色部分,原本被遮挡的摩托车也可以检出。

后续不妨考虑修改损失函数!
参考
- https://blog.csdn.net/nan355655600/article/details/107852353
- https://blog.roboflow.com/yolov5-improvements-and-evaluation/
bug调试
ImportError: cannot import name 'amp' from 'torch.cuda' (/home/wqt/anaconda3/envs/pytorch-cifar/lib/python3.7/site-packages/torch/cuda/__init__.py)
原始conda环境下torch版本比较低,按照install requirement.txt中安装又容易出现最高版本,最好的选择是看作者推荐的版本,或者从issue中找答案。
AttributeError: Cant get attribute SPPF on module models.common
这是由于下载的yolov5分支是比较早期的,要么下载最新git,要么直接把这个类贴进去。可参考https://blog.csdn.net/Steven_Cary/article/details/120886696
总结:
想改进YOLO去提升性能,可能面临的主要麻烦有:首先,涉及的改动联动太多;其次,数据格式也需要改成YOLO格式,如果想在其他数据库上运行,先要过数据这一关,一股蛋蛋的忧桑涌上心头
文章出处登录后可见!