由于在平时总是或多或少的遇到平移旋转的问题,每次都是现查资料,然后查了忘,忘了继续查,这次弄明白之后干脆写一篇文章,给人方便同时于己方便,后续如有扩充或变动也方便添加。
1. 转换矩阵、平移矩阵、旋转矩阵之间的关系
假设有两个向量和
,它们的转换关系为:
这里就是它的
旋转矩阵,就是它的
平移矩阵。使用齐次方式表示如下:
使用元素值替换后,表示如下:
在仿射变换中的转换矩阵表示先线性变换再平移。在这里转换矩阵表示如下:
平移矩阵表示如下:
旋转矩阵表示如下:
2. 缩放变换、平移变换和旋转变换
如果理解以上知识点之后,缩放变换、平移变换和旋转变换的特殊情况也迎刃而解。
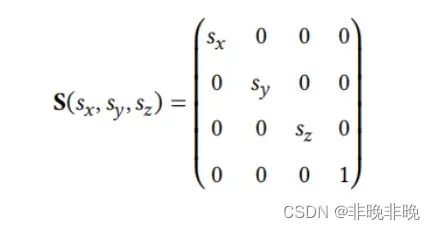
- 缩放变换
缩放变换只是在尺度上进行改变,所以它的变换形式如下:
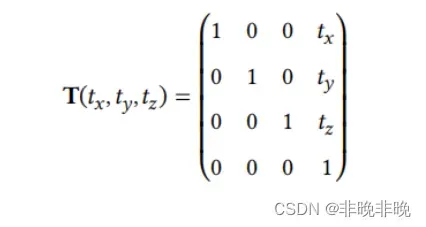
- 平移变换
平移变换的时候,角度不发生改变,也就是旋转矩阵R为单位矩阵,所以它的变换形式如下:
- 旋转变换
当空间内的物体绕着 x 轴,y 轴或者 z 轴旋转的时候,变换矩阵为:
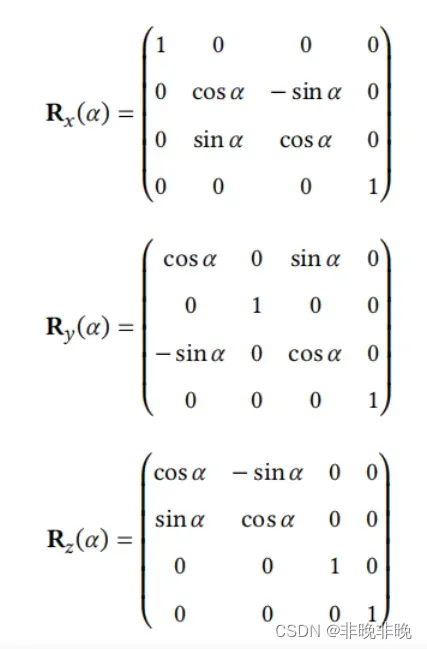

这三个角就被称作欧拉角(Euler angles)。
2. python实现旋转矩阵、四元数、欧拉角互相转化
在应用中,我们往往会遇到旋转矩阵、四元数和欧拉角之间的互相转换,在这里,我们只使用python代码来实现它们之间互相转换。
from scipy.spatial.transform import Rotation as R
def quaternion2euler(quaternion):
r = R.from_quat(quaternion)
euler = r.as_euler('xyz', degrees=True)
return euler
def euler2quaternion(euler):
r = R.from_euler('xyz', euler, degrees=True)
quaternion = r.as_quat()
return quaternion
def euler2rotation(euler):
r = R.from_euler('xyz', euler, degrees=True)
rotation_matrix = r.as_matrix()
return rotation_matrix
def quaternion2rotation_matrix(quaternion):
r = R.from_quat(quaternion)
rotation_matrix = r.as_matrix()
return rotation_matrix
def rotation_matrix2euler(rotation_matrix):
r = R.from_matrix(rotation_matrix)
euler = r.as_euler('xyz', degrees=True)
return euler
def rotation_matrix2quaternion(rotation_matrix):
r = R.from_matrix(rotation_matrix)
quaternion = r.as_quat()
return quaternion
if __name__ == '__main__':
# 四元数=>欧拉角
quaternion = [0.71934025092983234, -1.876085535681999e-06, -3.274841213980097e-08, -0.69465790385533299]
euler = quaternion2euler(quaternion) # [-9.20000743e+01 1.52039496e-04 -1.52039496e-04]
print(f'euler: {euler}')
# 四元数=>旋转矩阵
rotation_matrix = quaternion2rotation_matrix(quaternion)
print(f'rotation_matrix: {rotation_matrix}')
# 欧拉角=>四元数
quaternion = euler2quaternion(euler)
print(f'quaternion: {quaternion}') # [-7.19340251e-01 1.87608554e-06 3.27484122e-08 6.94657904e-01]
# 欧拉角=>旋转矩阵
rotation_matrix = euler2rotation(euler)
print(f'rotation_matrix: {rotation_matrix}')
# 旋转矩阵=>欧拉角
euler = rotation_matrix2euler(rotation_matrix)
print(f'euler: {euler}')
# 旋转矩阵=>四元数
quaternion = rotation_matrix2quaternion(rotation_matrix)
print(f'quaternion: {quaternion}')
文章出处登录后可见!
已经登录?立即刷新