最近又将Colmap论文翻出来仔细阅读总结了一下,于是顺便写个博客记录一下。Structure-from-Motion Revisited是当前SOTA的增量式SfM算法Colmap的论文,发表于2016年计算机视觉顶会CVPR。它是增量式SfM里程碑式的作品。
- 论文地址: https://openaccess.thecvf.com/content_cvpr_2016/papers/Schonberger_Structure-From-Motion_Revisited_CVPR_2016_paper.pdf
- 论文代码: http://colmap.github.io/

1 增量式SfM流程
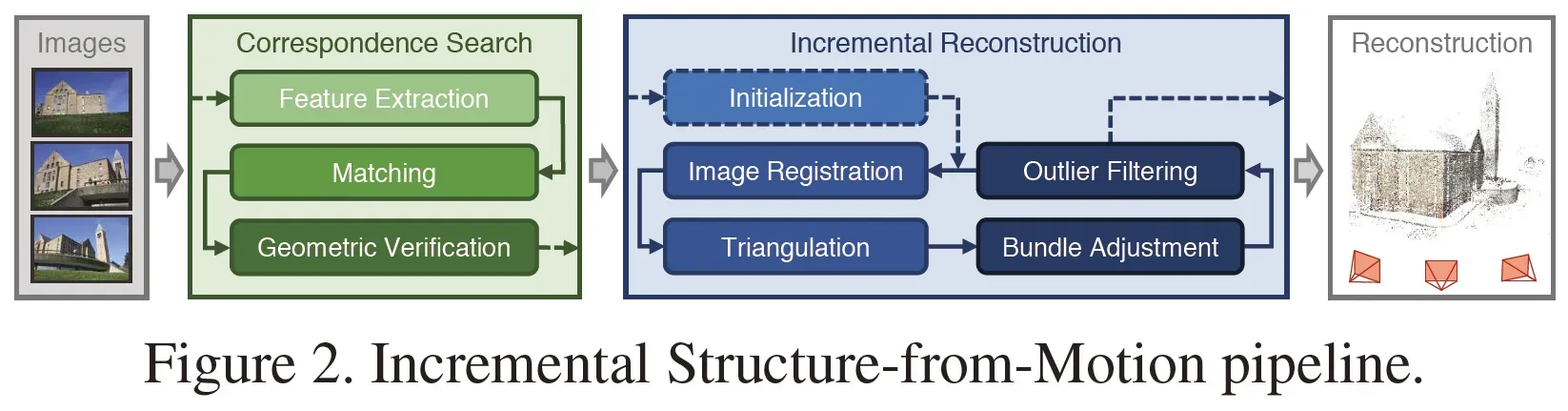
如上图所示,作者将其分成两大部分:Correspondence Search和Incremental Reconstruction。
Correspondence流程是:首先对所有的输入图像进行特征提取,这通常是由稳健的SIFT算法实现的;然后使用提取的特征点描述子进行匹配,一种暴力方法是穷举所有可能的匹配对,但是这在大场景情形下是不可接受的;匹配完成后,还需要使用对极几何关系对每个匹配图像对里的匹配点对进行精化,因为通常会存在很多误匹配点对。
Incremental Reconstruction流程是:初始化部分是寻找一对初始的匹配图像对,这个图像对的选择对后面的重建过程非常重要,所以通常需要精心筛选。论文提到,初始图像对之间的匹配点数量越多,通常可以获得更为鲁棒和精确的结果;而如果匹配点数量较为稀疏,则重建速度会更快,因为BA(Bundle Adjustment)求解的问题较小。选定匹配对后,利用对极几何关系分解获得两张图像的位姿,然后三角化生成三维点。接下来,每次往系统中增加一张新的图像,通过PnP(Perspective-n-Point)估计它的位姿,然后三角化生成新的三维点,之后进行BA优化,BA过程中滤除外点。直至所有图像都被加入系统中。
2 本文贡献
作者认为,现有的SfM系统在重建的完整性和鲁棒性(completeness and robustness)上还是存在缺陷。本文对此进行了改进,主要贡献包括:
- 一种提高初始化和三角测量鲁棒性的几何验证方法
- 最大化鲁棒性和准确性的次佳匹配图像选择策略
- 一种鲁棒的三角剖分方法,可以获得更完整的场景结构且计算成本更低
- 一种迭代BA、重三角化、外点滤除策略,显著提升重建完整性和精度,减轻漂移影响
- 一种用于挖掘密集图像集间的冗余视图的高效BA参数化方法
2.1 场景图增强
使用适当的几何关系增强场景图,包括:
- 首先估计图像对的F矩阵(fundamental matrix,基础矩阵),如果内点数大于N
F
,图像对通过几何验证。 - 然后估计H矩阵(homography matrix,单应矩阵),统计内点数N
H
,如果N
H
/N
F
<ε
HF
,它被认为是一般情况。 - 如果是校准过(知道相机内参K)的图像,估计E矩阵(essential matrix,本质矩阵)并计算内点数N
E
,如果N
E
/N
F
>ε
EF
,校准被认为是正确的。 - 如果同时满足2和3,则为一般的校准场景,分解E矩阵,并使用对应的内点匹配进行三角化。
- 计算三角测量角的中值 α
m
, 用一个
m
判断是纯旋转(全景)还是平面场景(平面)。 - 为了检测网络图像的水印、时间戳、边框等(统称WTF),通过估计图像间的相似变换并计算图像边缘的内点数N
S
,如果某对图像的N
S
/N
F
>ε
NF
或者N
S
/N
E
>ε
NE
,则认为这是一对WTF图像,不加入到场景图中。 - 对于场景图中的所有图像对,将场景图的类型标记为图像对最多的情况(正常、全景、平面)。
- 初始图像对倾向于选择非全景的校准图像对。
2.2 下一最佳视图选择
下一个最佳视图选择对姿态估计的质量、三角测量的完整性和准确性有很大影响。作者提到,一种流行的方法是找到一个图像,该图像观察到已被三角剖分最多的点。但是,有时图像的观察条件数并不好。研究表明,匹配点分布越均匀,重建效果越好。因此,作者提出了一种使用多尺度网格来衡量匹配点分布的方法。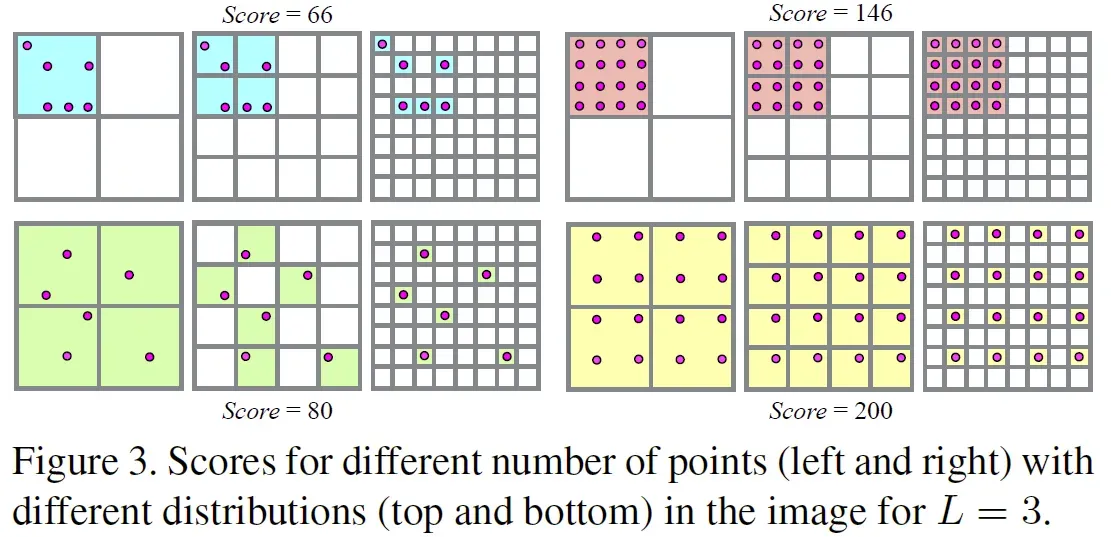
如上图所示,作者将图像划分为不同尺度的网格,然后对不同尺度的网格点分布进行打分,这样可以同时考虑点数和分布的影响。一般来说,点数越多,分布越均匀,该图像的得分就越高。上图中垂直方向是点分布差异和分数差异的比较,水平方向是点数和分数的比较。分数计算如下: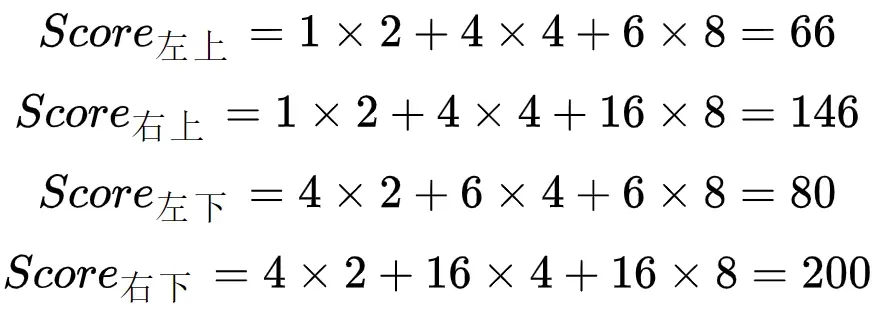
在对不同的匹配图像进行评分后,选择得分最高的图像作为下一个最佳匹配图像。实验表明,使用该策略可以提高重建的鲁棒性和准确性。
2.3 鲁棒高效的三角化
作者提出了一种高效的、基于采样的三角化方法,它可以从受异常值污染的特征点中鲁棒地估计出三维点。三角化的公式如下所示。其中τ指代任意一种三角化的方式,Colmap里用的是DLT(Direct Linear Transform,直接线性变换)。
作者不对全景图像进行三角剖分,这可能会由于错误的姿态估计而产生错误的三角剖分点。适合三角剖分的图像对应满足以下三个条件:
- 相机位置和三角点形成的角度α应该足够大:

- 投影回图像的三角剖分生成的 3D 点的深度值应为正:

- 重投影误差小于阈值t:

作者使用RANSAC方法对三角化点进行采样,从而剔除outliers的影响。实验表明,所提出方法可以在提高三角化完整性的同时减少计算量。
2.4 BA
作者提出的BA优化策略是:在每次增加一张新图像后,只对与该图像有最大关联的一部分图像进行局部BA。当模型增加一定比例之后,才进行一次全局BA。这样做可以减少计算的代价。
2.4.1 参数化求解方法
使用Cauchy核函数作为鲁棒损失函数来应对outliers的影响。依据不同大小的重建问题,使用不同的求解策略。对于数百张图像的情况,使用sparse方法进行求解;对于更多张的图像,使用PCG进行求解。对不同问题,采用不同的相机模型进行求解。
2.4.2 过滤
每次BA过程中,将重投影误差较大的三维点过滤掉。在优化过程中,使相机焦距和畸变参数自由优化,然后在全局BA后,将视野不正常或者畸变参数大的相机视为错误估计,并进行剔除。
2.4.3 再三角化(RT)
为了提高重建场景的完整性,对之前过滤掉但偏差不大的 3D 点进行重新三角化。不要提高三角测量阈值,仅对误差低于过滤阈值的观测值重新进行三角测量。
2.4.4 迭代精化
由于漂移(drift)或者错误的位姿估计,通常会有很大一部分三维点被错误滤除,而使用两步BA可以显著提升结果精度。因此,迭代进行BA、RT、过滤,直到被滤除的观测点和再三角化点减少。大多数场景下,在第二轮迭代过后,结果就会有显著的提升了。
2.5 冗余视图处理
BA是SfM性能的瓶颈。因此,作者针对大重叠度场景提出一种高效的相机分组优化策略,代替了昂贵的图割操作。与将很多相机聚类到一个子图上相比,作者将场景分割成很多小的、高度重叠的相机组,然后将每组相机使用一个(自由)相机来代替(这样可以减少BA优化过程中自由参数的数量)。
通过图像之间的共视程度来决定哪幅图像归于同一组。具体的,对于一个具有n个三维点的场景,使用一个{0,1}向量来表示每张图像的观测,若观测到该三维点,则为1,否则为0。然后通过交集/并集来获得共视程度,如下式所示:
若共视程度大于阈值且组内图像数量小于阈值,则将该图像加入该组。在每组内使用局部坐标系来参数化组内的相机。针对图像组的BA损失函数如下式所示:
其中,Gr是图像组共用的外参,Pc是组内每张图像的位姿。在进行优化的时候,组内每张图像的位姿为Pcr=PcGr,其中Pc在优化过程中固定不变,Gr可变。如此,BA优化时候,自由变量的数量就大大减少了。
3 总结
Colmap针对当前SfM存在的问题进行了充分的改进,它针对增量式重建的每一个步骤都提出了新的优化方法,从而提高了重建场景的完整性、鲁棒性、精度、效率等。虽然该论文是2016年提出的,但时至今日,它仍被认为是SOTA的增量式SfM算法,仍有很强的借鉴意义。
文章出处登录后可见!