各位同学好,今天和大家分享一下如何使用 TensorFlow 构建目标检测算法中的目标边界框定位损失函数iou、Giou、Diou、Ciou
1. iou 损失
1.1 方法介绍
iou又称为交并比,是指预测框和真实框的交集和并集的比值。在目标检测中,iou 能满足 对称性、同一性、非负性、三角不等性,并且相比于 L1、L2 损失函数具有尺度不变性。无论边界框的尺度大小,输出的iou损失总是在0到1之间,因此能够比较好的反映预测框和真实框之间的检测效果。
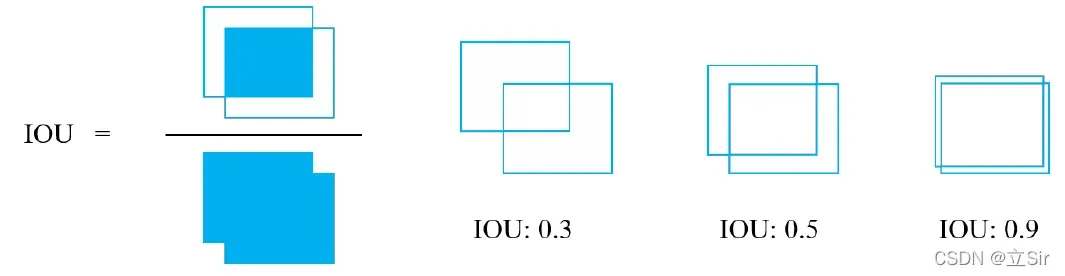
iou 的值越大,表明两个框重叠度越高。当iou为0时,说明两个框完全没有重合,iou为1时说明两个框完全重合。对于iou,我们通常会选取一个阈值,来确定预测框是正确的还是错误的。如两个框的iou大于0.5时,认为这是一个正确的框,包含物体,否则没有包含物体,是一个错误的框。
iou 损失是先求出预测框和真实框之间的交集和并集之比,再求负对数,但在实际应用的过程中经常将 iou 损失写成 1-iou,公示如下,预测框区域A,真实框区域B。
1.2 代码展示
box1 代表输入的预测框信息, shape=[b, w, h, num_anchor, 4] ,其中4代表每个检测框的中心点坐标(x,y),和预测框宽高(w,h)。box2 代表真实框信息,包含的内容和预测框相同。
输出iou的shape为[b, w, h, num_anchor],代表每张图片的每个检测框的iou
IOU 代码如下:
import tensorflow as tf
#(1)定义iou损失
def IOU(box1, box2):
# 接收预测框的坐标信息
box1_xy = box1[..., :2] # 处理所有batch所有图片的检测框,中心坐标
box1_wh = box1[..., 2:4] # 所有图片的宽高
box1_wh_half = box1_wh // 2 # 一半的宽高
box1_min = box1_xy - box1_wh_half # 左上角坐标
box1_max = box1_xy + box1_wh_half # 右下角坐标
# 接收真实框的左上和右下坐标, 方法和上面一样
box2_xy = box2[..., :2]
box2_wh = box2[..., 2:4]
box2_wh_half = box2_wh // 2
box2_min = box2_xy - box2_wh_half
box2_max = box2_xy + box2_wh_half
# 预测框的面积
box1_area = box1_wh[..., 0] * box1_wh[..., 1]
# 真实框的面积
box2_area = box2_wh[..., 0] * box2_wh[..., 1]
# 找出交集区域的xy坐标
intersect_min = tf.maximum(box1_min, box2_min) # 交集的左上角坐标
intersect_max = tf.minimum(box1_max, box2_max) # 交集的右下角坐标
# 所有图片的交集区域的宽和高,如果两个框分离,宽高就是0
intersect_wh = tf.maximum(intersect_max - intersect_min, 0)
# 计算交集区域面积
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
# 计算并集区域面积
union_area = box1_area + box2_area - intersect_area
# 计算交并比,分母加上一个很小的数防止为0
iou = intersect_area / (union_area + tf.keras.backend.epsilon())
return iou
#(2)验证
if __name__ == '__main__':
# 随机初始化
box1 = tf.fill([32, 16, 16, 3, 4], 50.0)
box2 = tf.fill([32, 16, 16, 3, 4], 40.0)
# 接收iou
iou = IOU(box1, box2)
print(iou.shape) # [32,16,16,3]
print(iou[0, 0, 0]) # 查看某一张图片的三个先验框的iou
'''
tf.Tensor([0.42608696 0.42608696 0.42608696], shape=(3,), dtype=float32)
'''2. Giou 损失
2.1 方法介绍
使用 iou 衡量两个检测框之间的重合程度时,当两个检测框不相交时,iou 等于0,不能反映两个框的距离的大小,不能进行梯度回传,因此无法进行学习训练。
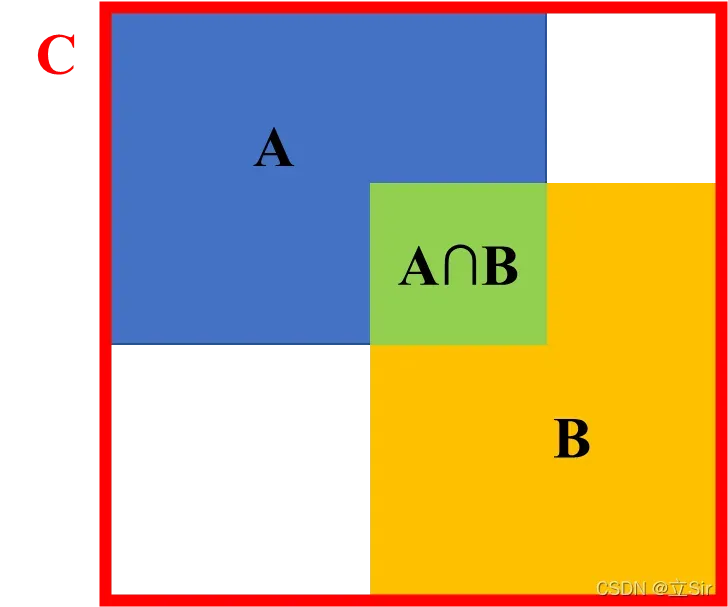
Giou 可以理解为,对于预测矩形框A 和 真实矩形框 B,计算能够同时包含A和B的最小的封闭矩形区域C。将封闭区域C 的面积减去 A和B的并集面积,再除以C的面积,得到一个比值。Giou就等于iou减去这个比值,公式如下:
当两个边界框完美重合在一起时,IOU=1,C=AUB,此时GIOU=1;当两个边界框完全分离时,IOU=0,AUB=0,此时GIOU=-1。因此GIOU的值是在 [-1, 1] 之间。那么Loss_GIOU就是在 [-2, 0] 之间
Giou损失的特点:
(1)GIOU损失能够衡量两个边界框的距离
(2)GIOU不受目标对象大小的限制,具有很好的泛化能力。
(3)GIOU引入了包含预测框A和真实框B的最小封闭区C,所以即使A和B不相交时,依然可以对检测框优化。
(4)与IOU相比,GIOU不仅仅关注两个边界框有重叠的区域,最小封闭矩形C和两个矩形区域A和B之间的空隙(上图白色区域),在A和B没有很好的对齐时会增大。因此GIOU的值不仅能反映边界框A和B是否有重叠区域,而且还能反映两个边界框是如何重叠的。
2.2 代码展示
'''
参数
box1: 输入的预测框信息, [b, w, h, num_anchor, 4], 其中4代表该框的中心坐标xy和宽高wh
box2: 输入的真实框信息, [b, w, h, num_anchor, 4], 其中4代表该框的中心坐标xy和宽高wh
返回值
iou: 输出的IOU损失, [b, w, h, num_anchor, 1], 其中1代表Giou值
'''
import tensorflow as tf
#(1)定义GIOU损失
def GIOU(box1, box2):
# 接收预测框的坐标信息
box1_xy = box1[..., 0:2] # 接收所有预测框的中心点xy
box1_wh = box1[..., 2:4] # 接收所有预测框的宽高wh
box1_wh_half = box1_wh // 2 # 取一半的宽高
box1_min = box1_xy - box1_wh_half # 预测框的左上角坐标
box1_max = box1_xy + box1_wh_half # 预测框的右下角坐标
# 预测框的面积w*h
box1_area = box1_wh[..., 0] * box1_wh[..., 1]
# 接收真实框的坐标信息
box2_xy = box2[..., 0:2] # 接收所有真实框的中心点坐标
box2_wh = box2[..., 2:4] # 接收所有真实框的宽高
box2_wh_half = box2_wh // 2 # 取宽高的一半
box2_min = box2_xy - box2_wh_half # 真实框的左上角坐标
box2_max = box2_xy + box2_wh_half # 真实框的右下角坐标
# 真实框面积w * h
box2_area = box2_wh[..., 0] * box2_wh[..., 1]
# 两个框的交集的
intersect_min = tf.maximum(box1_min, box2_min) # 交集的左上角坐标
intersect_max = tf.minimum(box1_max, box2_max) # 交集的右下角坐标
# 交集的宽高
intersect_wh = intersect_max - intersect_min
# 交集的面积iw*ih
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
# 并集的面积
union_area = box1_area + box2_area - intersect_area
# 计算iou
iou = intersect_area / (union_area + tf.keras.backend.epsilon())
# 计算可以包含预测框和真实框的最小封闭矩形框
enclose_min = tf.minimum(box1_min, box2_min)
enclose_max = tf.maximum(box1_max, box2_max)
# 最小矩形框的宽高
enclose_wh = enclose_max - enclose_min
# 闭环矩形的面积ew*eh
enclose_area = enclose_wh[..., 0] * enclose_wh[..., 1]
# 计算Giou
giou = iou - (enclose_area - union_area) / (enclose_area + tf.keras.backend.epsilon())
return iou, giou
#(2)验证
if __name__ == '__main__':
# 随机初始化
box1 = tf.fill([32, 16, 16, 3, 4], 50.0)
box2 = tf.fill([32, 16, 16, 3, 4], 40.0)
# 接收iou和giou
iou, giou = GIOU(box1, box2)
print('iou_shape:', iou.shape) # [32,16,16,3]
print(iou[0, 0, 0]) # 查看某一张图片的三个先验框的iou
'''
tf.Tensor([0.42608696 0.42608696 0.42608696], shape=(3,), dtype=float32)
'''
print('giou_shape:', giou.shape) # [32,16,16,3]
print(giou[0,0,0])
'''
tf.Tensor([0.3765002 0.3765002 0.3765002], shape=(3,), dtype=float32)
'''3. Diou 损失
3.1 方法介绍
GIOU 损失首先是要增加预测框的大小,使其能够与目标框重叠,然后与等式中的 IOU 项重叠。另外,当 GIOU 面对两个边界框是水平或者竖直的,对于GIOU 的参数更新和优化就会变得很缓慢。
DIOU 在IOU的基础上加入了中心点归一化,将预测框和真实框之间的距离、重叠率、尺度都考虑了进去,能够直接最小化两个检测框之间的距离,使得目标边界框回归变得更加稳定,收敛速度更快。
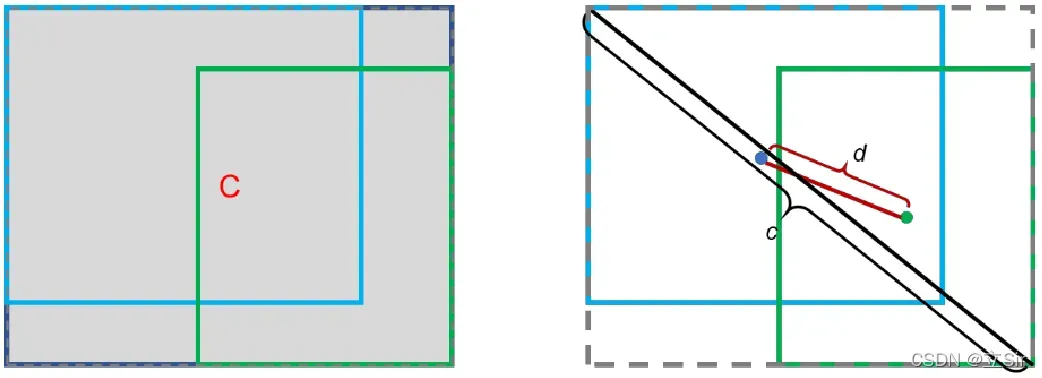
b 代表预测框的中心点坐标,b_gt 代表真实框的中心点坐标,代表两个中心点之间的欧式距离,c 代表两个目标边界框外接矩形的对角线的长度。公式如下
当两个边界框完美重合在一起时,距离d=0,IOU=1,此时DIOU=1。当两个边界框完全分离时,IOU=0,距离d^2 和 c^2 的比值等于1,此时DIOU=-1。因此,DIOU的值域是 [-1, 1],Loss_DIOU 值域是[0, 2]
3.2 代码展示
'''
参数
box1: 输入的预测框信息, [b, w, h, num_anchor, 4], 其中4代表该框的中心坐标xy和宽高wh
box2: 输入的真实框信息, [b, w, h, num_anchor, 4], 其中4代表该框的中心坐标xy和宽高wh
返回值
iou: 输出的IOU损失, [b, w, h, num_anchor, 1], 其中1代表Diou值
'''
import tensorflow as tf
#(1)定义Diou计算方法
def DIOU(box1, box2):
# ① 先计算iou
# 接收预测框的坐标信息
box1_xy = box1[..., 0:2] # 预测框的中心坐标
box1_wh = box1[..., 2:4] # 预测框的宽高
box1_wh_half = box1_wh // 2 # 一半的预测框的宽高
box1_min = box1_xy - box1_wh_half # 预测框的左上角坐标
box1_max = box1_xy + box1_wh_half # 预测框的右下角坐标
# 预测框的面积
box1_area = box1_wh[..., 0] * box1_wh[..., 1]
# 接收真实框的坐标信息
box2_xy = box2[..., 0:2] # 真实框的中心坐标
box2_wh = box2[..., 2:4] # 真实框的宽高
box2_wh_half = box2_wh // 2 # 一半的宽高
box2_min = box2_xy - box2_wh_half # 真实框的左上角坐标
box2_max = box2_xy + box2_wh_half # 真实框的右下角坐标
# 真实框的面积
box2_area = box2_wh[..., 0] * box2_wh[..., 1]
# 交集的左上角和右下角坐标
intersect_min = tf.maximum(box1_min, box2_min)
intersect_max = tf.minimum(box1_max, box2_max)
# 交集的宽高
intersect_wh = intersect_max - intersect_min
# 交集的面积
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
# 并集的面积
union_area = box1_area + box2_area - intersect_area
# 计算iou,分母加上很小的数防止为0
iou = intersect_area / (union_area + tf.keras.backend.epsilon())
# ② 求出包含两个框的最小封闭矩形
enclose_min = tf.minimum(box1_min, box2_min) # 左上坐标
enclose_max = tf.maximum(box1_max, box2_max) # 右下坐标
enclose_wh = enclose_max - enclose_min # 封闭矩形的宽高
# 计算对角线距离 w**2 + h**2
enclose_distance = tf.square(enclose_wh[..., 0]) + tf.square(enclose_wh[..., 1])
# ③ 计算两个框中心点之间的距离,计算方法同上
center_distance = tf.reduce_sum(tf.square(box1_xy - box2_xy), axis=-1)
# ④ 计算diou
diou = iou - (center_distance / enclose_distance)
# 返回每个检测框的iou和diou
return iou, diou
#(2)验证
if __name__ == '__main__':
# 随机初始化
box1 = tf.fill([32, 16, 16, 3, 4], 50.0)
box2 = tf.fill([32, 16, 16, 3, 4], 40.0)
# 接收iou和giou
iou, diou = DIOU(box1, box2)
print('iou_shape:', iou.shape) # [32,16,16,3]
print(iou[0, 0, 0]) # 查看某一张图片的三个先验框的iou
'''
tf.Tensor([0.42608696 0.42608696 0.42608696], shape=(3,), dtype=float32)
'''
print('giou_shape:', diou.shape) # [32,16,16,3]
print(diou[0,0,0])
'''
tf.Tensor([0.39302912 0.39302912 0.39302912], shape=(3,), dtype=float32)
'''4. Ciou 损失
4.1 方法介绍
CIOU是在DIOU的基础上发展而来的。作者指出,作为一个优秀的回归定位损失应该考虑到三种几何参数:重叠面积、中心点距离、长宽比。DIOU损失关注了边界框的相交面积和位置坐标点距离,但忽略了边界框长宽比的统一性也是非常重要的衡量标准,因此CIOU引入了长宽比。
DIOU损失当两个边界框不相交时,可以用适当的梯度进行参数更新从而进一步缩小两个检测框的差异。同时尽可能缩小两个框的位置坐标距离,以少量的计算代价在精确度上进一步得到提升。CIOU损失还关注了边界框长宽比的统一性,因此有更快的收敛速度和更好的性能。
纵横比公式如下,其中代表权衡因子,
用于评估纵横比的均匀性。
CIOU损失计算公式如下,
4.2 代码展示
'''
参数
box1: 输入的预测框信息, [b, w, h, num_anchor, 4], 其中4代表该框的中心坐标xy和宽高wh
box2: 输入的真实框信息, [b, w, h, num_anchor, 4], 其中4代表该框的中心坐标xy和宽高wh
返回值
iou: 输出的IOU损失, [b, w, h, num_anchor, 1], 其中1代表Ciou值
'''
import tensorflow as tf
import math
#(1)定义CIOU计算方法
def CIOU(box1, box2):
# ① 先计算iou
# 接收预测框的坐标信息
box1_xy = box1[..., 0:2] # 预测框的中心坐标
box1_wh = box1[..., 2:4] # 预测框的宽高
box1_wh_half = box1_wh // 2 # 一半的预测框的宽高
box1_min = box1_xy - box1_wh_half # 预测框的左上角坐标
box1_max = box1_xy + box1_wh_half # 预测框的右下角坐标
# 预测框的面积
box1_area = box1_wh[..., 0] * box1_wh[..., 1]
# 接收真实框的坐标信息
box2_xy = box2[..., 0:2] # 真实框的中心坐标
box2_wh = box2[..., 2:4] # 真实框的宽高
box2_wh_half = box2_wh // 2 # 一半的宽高
box2_min = box2_xy - box2_wh_half # 真实框的左上角坐标
box2_max = box2_xy + box2_wh_half # 真实框的右下角坐标
# 真实框的面积
box2_area = box2_wh[..., 0] * box2_wh[..., 1]
# 交集的左上角和右下角坐标
intersect_min = tf.maximum(box1_min, box2_min)
intersect_max = tf.minimum(box1_max, box2_max)
# 交集的宽高
intersect_wh = intersect_max - intersect_min
# 交集的面积
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
# 并集的面积
union_area = box1_area + box2_area - intersect_area
# 计算iou,分母加上很小的数防止为0
iou = intersect_area / (union_area + tf.keras.backend.epsilon())
# ② 求出包含两个框的最小封闭矩形
enclose_min = tf.minimum(box1_min, box2_min) # 左上坐标
enclose_max = tf.maximum(box1_max, box2_max) # 右下坐标
# 计算对角线距离
enclose_distance = tf.reduce_sum(tf.square(enclose_max - enclose_min), axis=-1)
# 计算两个框中心点之间的距离,计算方法同上
center_distance = tf.reduce_sum(tf.square(box1_xy - box2_xy), axis=-1)
# ③ 考虑长宽比
# tf.math.atan2()返回[-pi, pi]之间的角度
v = 4 * tf.square(tf.math.atan2(box1_wh[..., 0], box1_wh[..., 1]) - tf.math.atan2(box2_wh[..., 0], box2_wh[..., 1])) / (math.pi * math.pi)
alpha = v / (1.0 - iou + v)
# 计算ciou
ciou = iou - center_distance / enclose_distance - alpha * v
return iou, ciou
#(2)验证
if __name__ == '__main__':
# 随机初始化
box1 = tf.fill([32, 16, 16, 3, 4], 50.0)
box2 = tf.fill([32, 16, 16, 3, 4], 40.0)
# 接收iou和giou
iou, ciou = CIOU(box1, box2)
print('iou_shape:', iou.shape) # [32,16,16,3]
print(iou[0, 0, 0]) # 查看某一张图片的三个先验框的iou
'''
tf.Tensor([0.42608696 0.42608696 0.42608696], shape=(3,), dtype=float32)
'''
print('giou_shape:', ciou.shape) # [32,16,16,3]
print(ciou[0,0,0])
'''
tf.Tensor([0.39302912 0.39302912 0.39302912], shape=(3,), dtype=float32)
'''文章出处登录后可见!