今天参考知乎岳小飞的博客尝试用一下比较标准的机械臂+强化学习的实战项目。这篇博客主要记录一下实现过程,当做个人学习笔记。
在第一遍安装过程中遇到了panda-gym和stb3以及gym-robotics这三个包对gym版本依赖冲突的问题。
这里记录第二遍安装
原文链接:https://www.zhihu.com/people/shen-yue-79/posts
panda-gym的github链接:https://github.com/qgallouedec/panda-gym
panda-gym官方文档:
https://panda-gym.readthedocs.io/en/latest/index.html
1.新建环境,安装stb3
这里我用anaconda新建了一个python 3.7的环境
安装gym:
pip install stable-baselines3==1.3.0
安装完成后运行如下代码,可检查是否正常:
import gym
from stable_baselines3 import A2C
env = gym.make('CartPole-v1')
model = A2C('MlpPolicy', env, verbose=1)
model.learn(total_timesteps=10000)
obs = env.reset()
for i in range(1000):
action, _state = model.predict(obs, deterministic=True)
obs, reward, done, info = env.step(action)
env.render()
if done:
obs = env.reset()
运行了以下有个报错应该是没安pyglet包,安一下
pip install pyglet
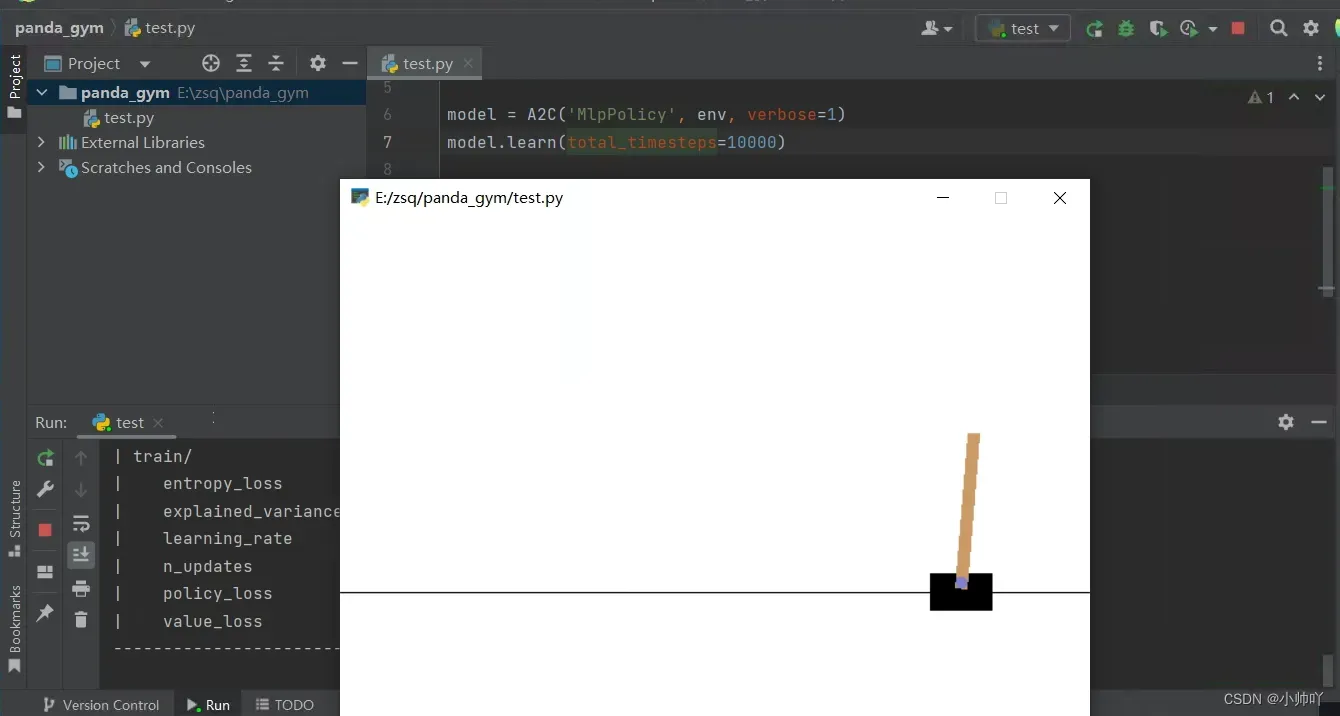
到这里应该是安装好stb3了。
2.安装panda-gym
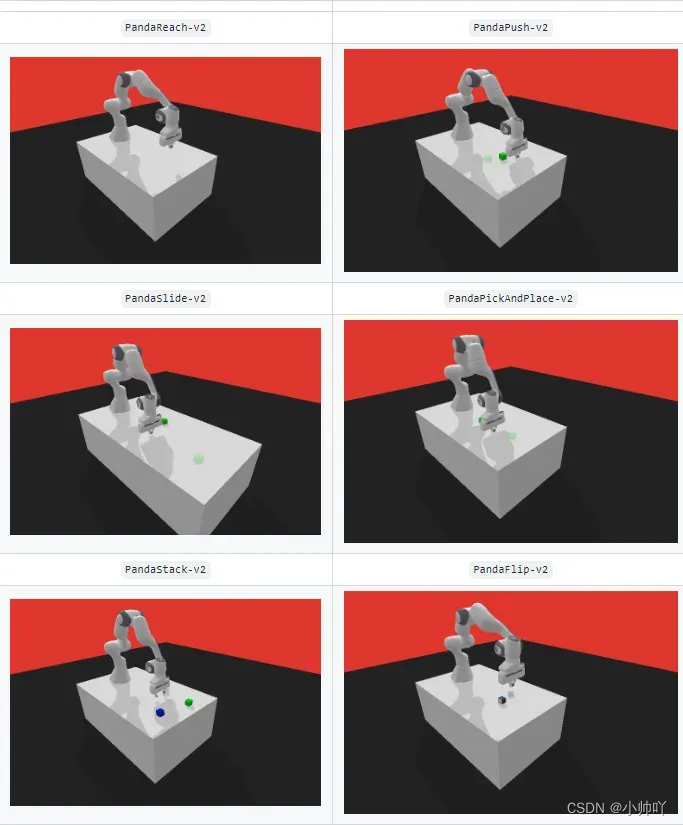
panda-gym 基于 PyBullet 引擎开发,围绕 panda 机械臂封装了 reach、push、slide、pick&place、stack、flip 等 6 个任务,主要也是受 OpenAI Fetch 启发,发表在了 NeurIPS 2021 的 workshop 上。
有两种安装方式一种是直接安装,这里用方式一安装2.0.0版本
方式1:
pip install panda-gym
如果想修改现有代码,或者自定义更多的任务,可以下载源码后,以 -e 方式安装(这种方式我尝试了遇到了包版本冲突问题):
方式2:
git clone https://github.com/qgallouedec/panda-gym/
cd panda-gym
pip install -e .
测试panda-gym是否安装成功
import gym
import panda_gym
env = gym.make("PandaReach-v2", render=True)
obs = env.reset()
done = False
while not done:
action = env.action_space.sample()
obs, reward, done, info = env.step(action)
env.render()
env.close()
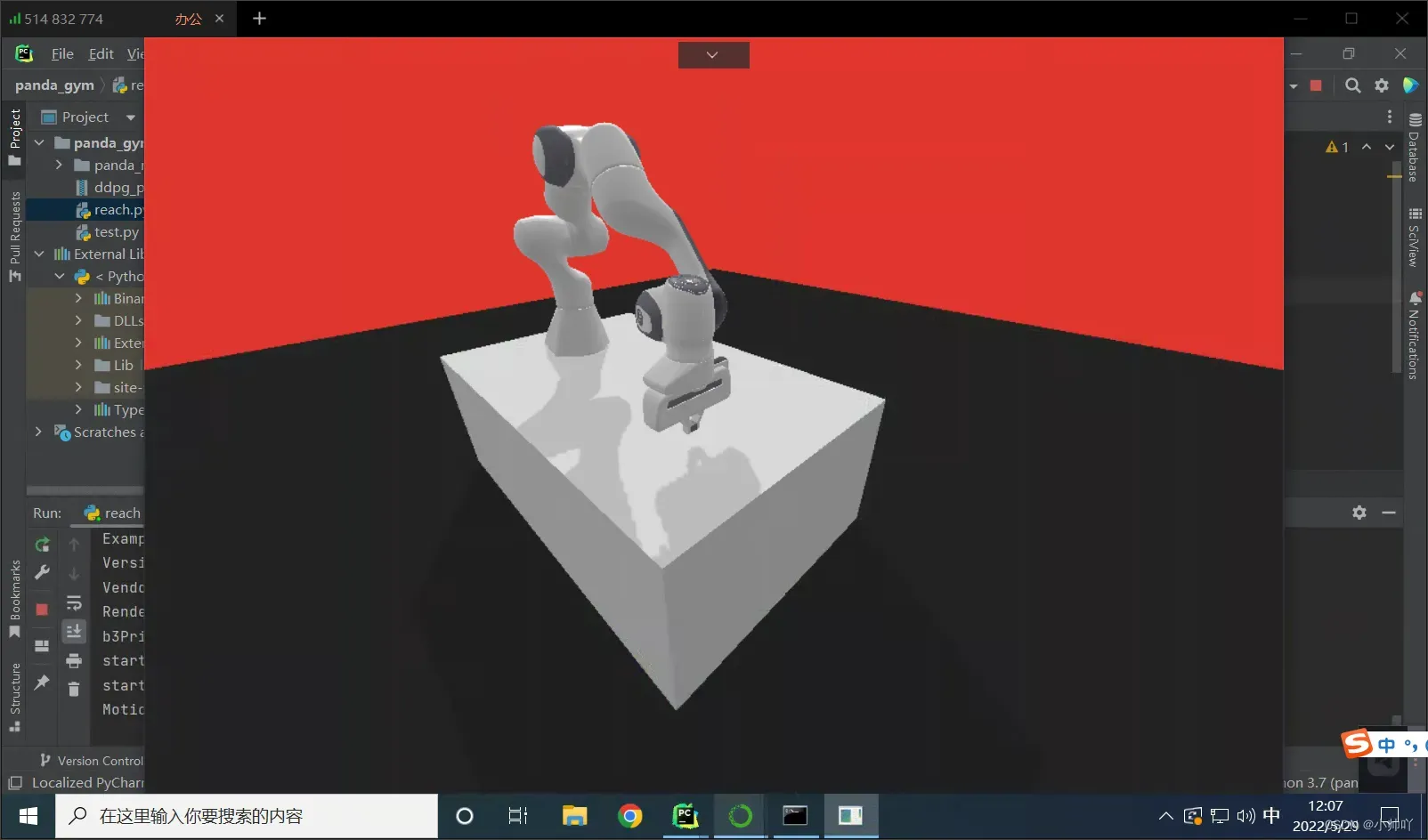
现在应该是装好panda-gym了。
3.开始训练
以 PandaReach-v2 任务为例,训练 DDPG/TD3/SAC+HER 算法,方便做横向对比。
reach 任务比较简单,要求机械臂到达指定位置,误差在一定范围之内即代表成功,默认采用稀疏奖励。
训练之前安装一下tensorboard帮助我们之后看训练过程
pip install tensorboard
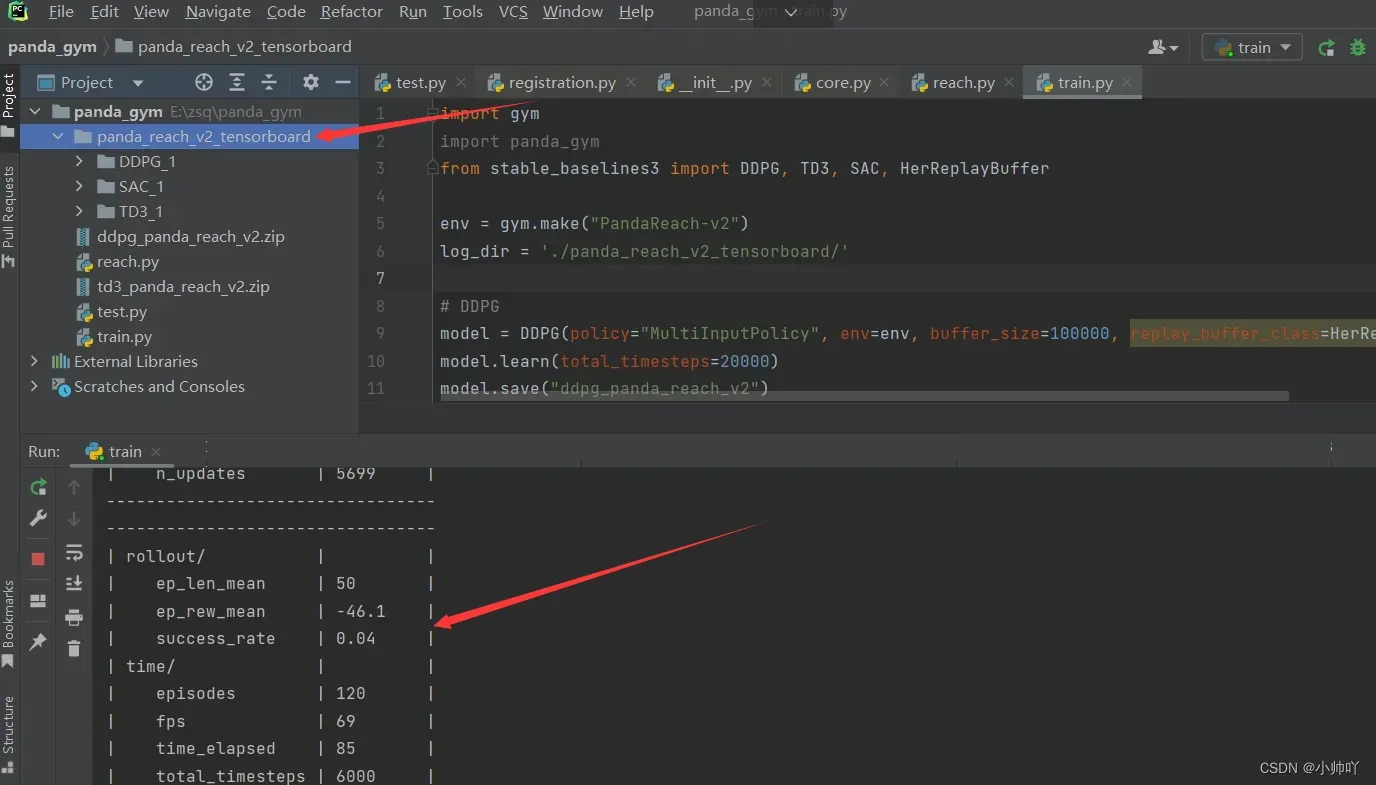
以 PandaReach-v2 任务为例(代码参考自岳小飞,这里加了第二行导入panda-gym包)
import gym
import panda_gym
from stable_baselines3 import DDPG, TD3, SAC, HerReplayBuffer
env = gym.make("PandaReach-v2")
log_dir = './panda_reach_v2_tensorboard/'
# DDPG
model = DDPG(policy="MultiInputPolicy", env=env, buffer_size=100000, replay_buffer_class=HerReplayBuffer, verbose=1, tensorboard_log=log_dir)
model.learn(total_timesteps=20000)
model.save("ddpg_panda_reach_v2")
# TD3
model = TD3(policy="MultiInputPolicy", env=env, buffer_size=100000, replay_buffer_class=HerReplayBuffer, verbose=1, tensorboard_log=log_dir)
model.learn(total_timesteps=20000)
model.save("td3_panda_reach_v2")
# SAC
model = SAC(policy="MultiInputPolicy", env=env, buffer_size=100000, replay_buffer_class=HerReplayBuffer, verbose=1, tensorboard_log=log_dir)
model.learn(total_timesteps=20000)
model.save("sac_panda_reach_v2")
运行上面代码,又遇到第一遍的问题
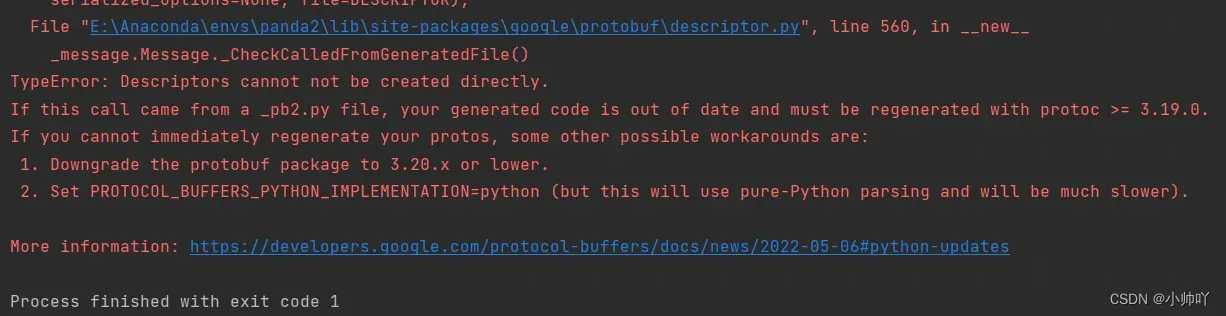
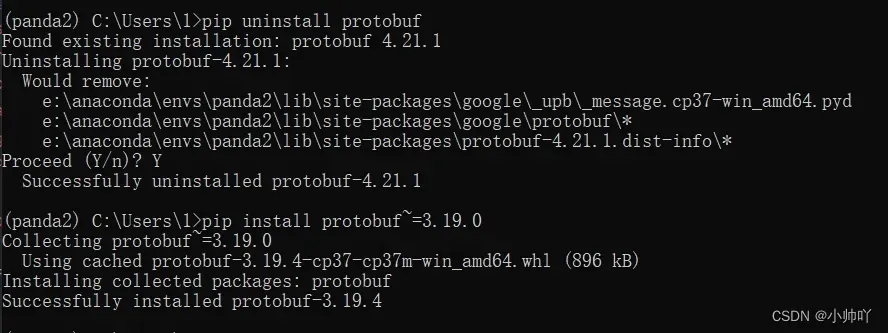
问题是protobuf版本太高了
TypeError: Descriptors cannot not be created directly
谷歌查到了解决办法:https://discuss.streamlit.io/t/typeerror-descriptors-cannot-not-be-created-directly/25639/8
简而言之,终端运行下面两个命令
pip uninstall protobuf
pip install protobuf~=3.19.0
重新运行代码,大概10分钟(这里我也不知道为啥用了cpu而不是cudn,我这台电脑有个3070卡,不过电脑的cpu配置也还行)
4.查看训练过程
运行完毕后,终端输入命令
tensorboard --logdir panda_reach_v2_tensorboard
这里如果有如下报错:tensorboard : 无法将“tensorboard”项识别为 cmdlet、函数、脚本文件或可运行程序的名称。可以参看这篇博客:https://blog.csdn.net/qq_47997583/article/details/125028675
这里没问题的话出现下面的结果:

在浏览器粘贴链接
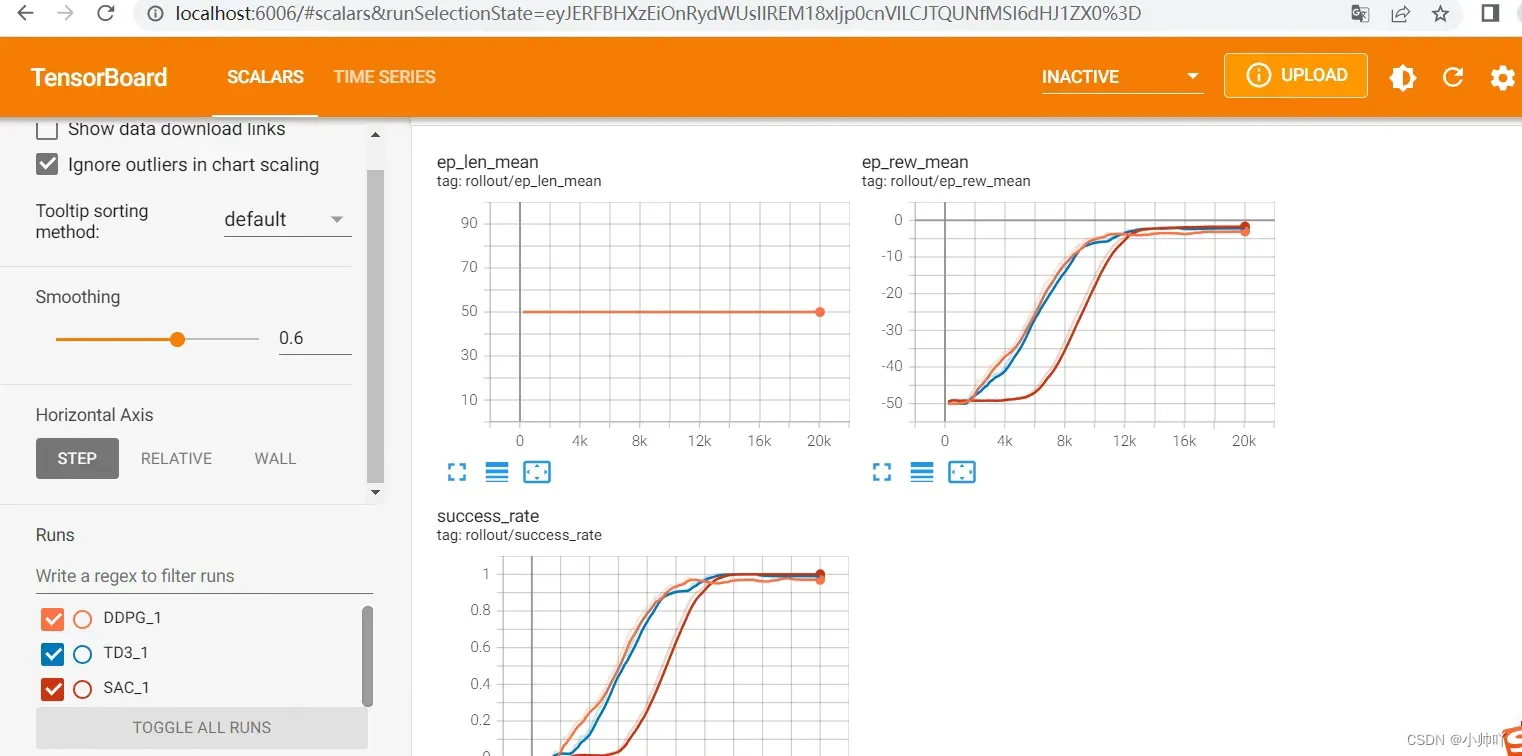
从训练结果看在reach任务中,从训练效率DDPG和TD3接近,SAC稍慢,但是成功率都很快到了100%。后面也包括train过程中参数的变化值。
4.查看训练出的模型的真实效果
代码参考自岳小飞
import gym
from stable_baselines3 import DDPG, TD3, SAC, HerReplayBuffer
env = gym.make("PandaReach-v2", render=True)
model = DDPG.load('ddpg_panda_reach_v2', env=env)
# model = TD3.load('td3_panda_reach_v2', env=env)
# model = SAC.load('sac_panda_reach_v2', env=env)
obs = env.reset()
for i in range(1000):
action, _state = model.predict(obs, deterministic=True)
obs, reward, done, info = env.step(action)
env.render()
if done:
print('Done')
obs = env.reset()
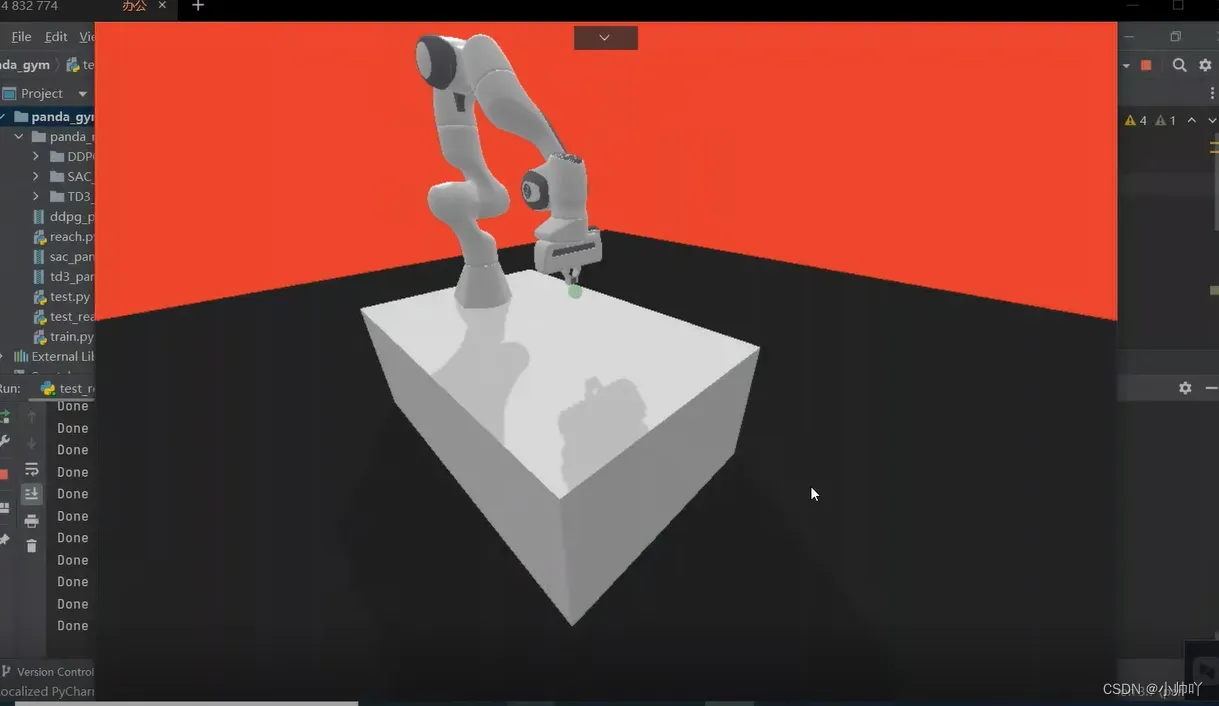
视频效果见:https://www.bilibili.com/video/BV1hB4y1X7k7?spm_id_from=333.999.0.0
文章出处登录后可见!