1 简介
有前视图、后视图、周视图、环视图等概念
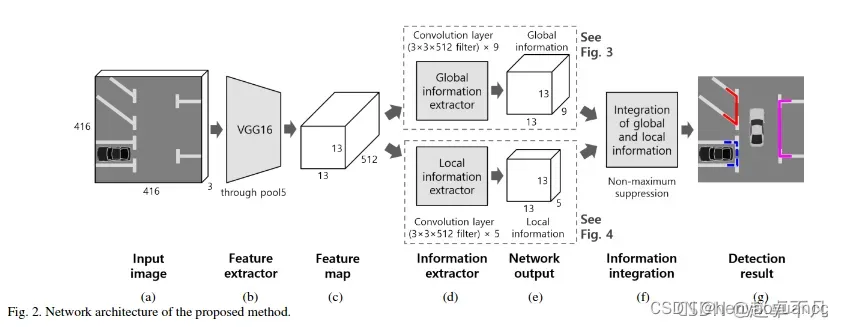
2 End-to-End Trainable One-Stage Parking Slot Detection Integrating Global and Local Information
在AVM上检测车位,网络结构分为两个大的分支,局部信息和全局信息,全局信息负责车位整体信息,局部信息负责车位角点位置的回归,局部特征更加关注局部信息,因此车位角点的位置信息更准确
2.1 全局特征
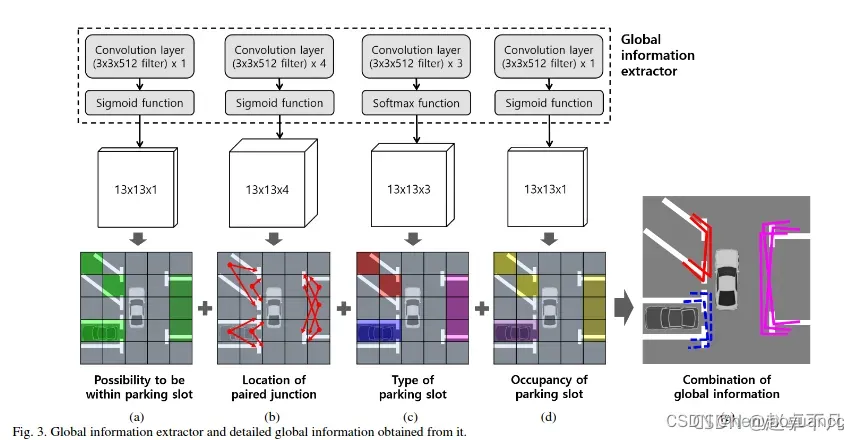
- a:cell是否在车位里,加权L2l oss
- b:如果cell在车位里,回归车位两个角点位置,归一化到[-1,1],L2 loss
- c:车位类型,垂直、平行、倾斜,BCE loss
- d:车位是否被占用,加权L2 loss
全局分支预测车位的基本位置,以及车位类型、是否被占用等信息
2.2 局部特征
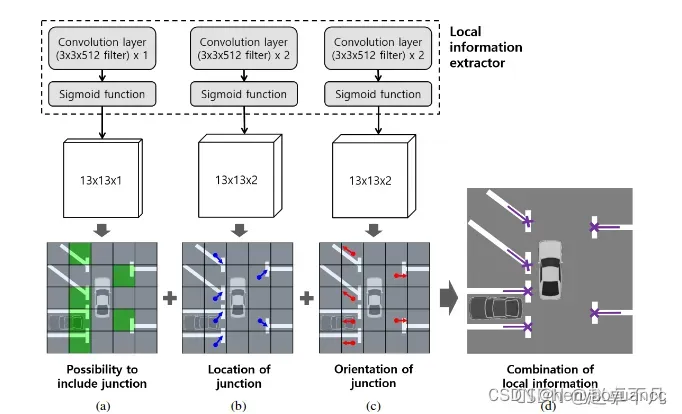
- a:cell位置是否包含角点,加权L2 loss
- b:如果cell包含角点,回归车位两个角点位置,归一化到[-0.5,0.5],L2 loss
- c:角点方向,回归角度两个轴的法向量[-1,1],L2 loss
局部特征分支可以预测车位角点的精确位置和角度
2.3 两分支的信息整合
局部角点位置代替全局特征的角点位置,之所以全局也回归角点位置,是为了匹配两分支的角点
然后以车位为单位进行nms
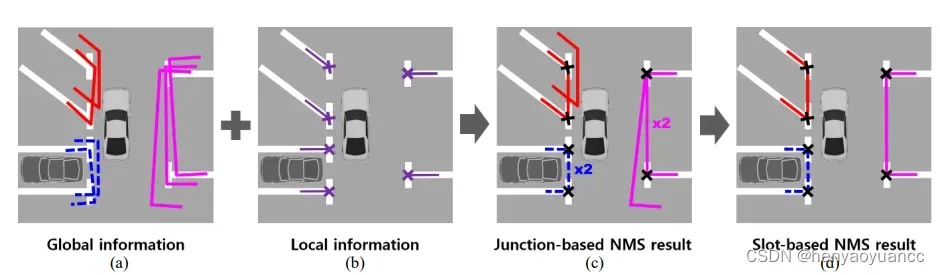
junciton-based nms就是角点替换的过程,离得近的替换(能替换的替换,找不到的就不替换,如图c
紫色车位下角点),如果两个车位的角点匹配相同,也可以起到合并的作用(如上图蓝色车位)。
slot-based nms就是车位为单位的nms了
2.4 思考总结
1、角点回归,全局分支归一化到-1到1,局部归一化到[-0.5,0.5]
2、全局特征和局部特征,深度、感受野都是一致的,为什么一个叫局部一个叫全局,就是各有分工,两个分支回归不同的任务?
3、论文里各损失的权重是给出来的,同事说复现的时候,把权重当成了模型参数,自动调整,是否合理?如何确定最优权重?
参考github总结
综述:添加链接描述
文章出处登录后可见!
已经登录?立即刷新