NeRF神经网络
NeRF: Neural Radiance Fields简介
优化单个场景的神经表示并渲染新视图的Tensorflow实现。
NeRF:将场景表示为用于视图合成的 Neural Radiance Fields
团队介绍
- 来自加州大学伯克利分校Ben Mildenhall(本·米尔登霍尔)
- 来自加州大学伯克利分校Pratul P. Srinivasan(普拉图尔·斯里尼瓦桑)
- 来自加州大学伯克利分校Matthew Tancik(马修·坦西克)
- 来自谷歌研究Jonathan T. Barron( 乔纳森·巴伦)
- 来自加州大学圣地亚哥分校Ravi Ramamoorthi(拉维·拉马穆尔蒂)
- 来自加州大学伯克利分校Ren Ng( 吴义仁)
黄色底为表示同等贡献
在ECCV 2020年(口头陈述,最佳论文荣誉奖)
快速入门
要设置conda环境,请下载示例培训数据,开始培训过程,并启动Tensorboard:
conda env create -f environment.yml
conda activate nerf
bash download_example_data.sh
python run_nerf.py --config config_fern.txt
tensorboard --logdir=logs/summaries --port=6006
如果一切正常,您现在可以进入localhost:6006在你的浏览器里观看“Fern”场景训练。
设置
Python 3依赖性:
- Tensorflow 1.15
- matplotlib
- numpy
- imageio
- configargparse
LLFF数据加载器需要ImageMagick。
我们提供了一个conda环境设置文件,包括上述所有依赖项。创造conda环境nerf通过运行:
conda env create -f environment.yml
你还需要LLFF code(和COLMAP)建立评估姿态,如果你想在自己的真实数据上运行。
什么是NeRF?
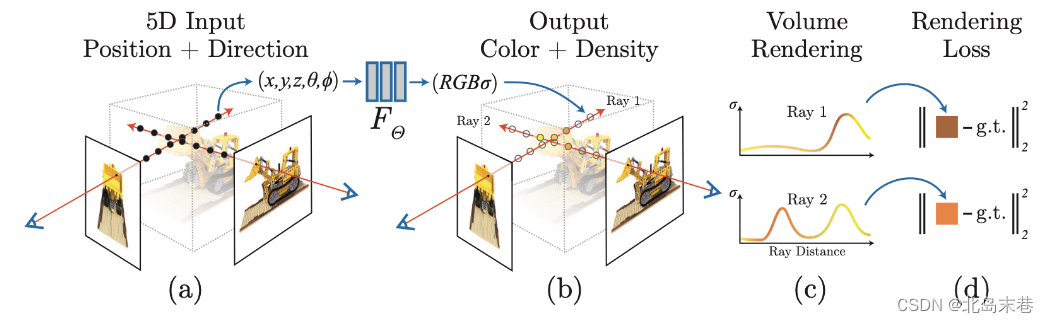
Neural Radiance Fields是一个简单的完全连接的网络(权重约为5MB ),它被训练为使用渲染损失来再现单个场景的输入视图。该网络直接从空间位置和观察方向(5D输入)映射到颜色和不透明度(4D输出),充当“体积”,因此我们可以使用体积渲染来有区别地渲染新视图。
优化一个NeRF需要几个小时到一两天的时间(取决于分辨率),并且只需要一个GPU。从优化的NeRF渲染一幅图像需要不到一秒到30秒的时间,这也取决于分辨率。
运行代码
这里我们展示了如何在两个示例场景中运行我们的代码。您可以下载论文中使用的其他合成和真实数据。
优化NeRF
启动程序
bash download_example_data.sh
来获取我们的合成乐高数据集和LLFF Fern数据集。
若要优化低分辨率Fern NeRF:
python run_nerf.py --config config_fern.txt
经过20万次迭代(大约15个小时),应该可以在logs/fern_test/fern_test_spiral_200000_rgb.mp4

要优化低分辨率乐高NeRF:
python run_nerf.py --config config_lego.txt
经过20万次迭代后,您应该会看到这样的视频:

渲染一个NeRF
启动程序
bash download_example_weights.sh
为Fern数据集获得一个预训练的高分辨率NeRF。现在您可以使用render_demo.ipynb来呈现新的视图。
复制纸质结果
示例配置文件的分辨率低于论文和视频中的定量/定性结果。要复制论文中的结果,从中的配置文件开始paper_configs/。我们的合成搅拌机数据和LLFF场景托管深度体素数据由文森特·西兹曼主持。
从NeRF中提取几何体
检验extract_mesh.ipynb例如,运行行进立方体来从训练好的NeRF网络中提取三角形网格。你需要安装皮姆库斯用于行进立方体和的包三角形网线图和pyrender如果要渲染笔记本内部的网格,请执行以下操作:
pip install trimesh pyrender PyMCubes
为自己的场景生成姿势
不摆姿势?
我们建议使用imgs2poses.py脚本来自LLFF电码。然后,您可以使用以下命令将基本场景目录传递到我们的代码中--datadir <myscene>随着-dataset_type llff。你可以看看config_fern.txt前向场景使用的设置示例。对于球形捕捉的360°场景,我们建议添加--no_ndc --spherify --lindisp旗帜。
已经有姿势了!
在…里run_nerf.py和所有其他代码一样,我们使用与OpenGL中相同的姿态坐标系:图像的局部相机坐标系定义为X轴指向右侧,Y轴向上,Z轴从图像中看向后。
姿势存储为3×4 numpy数组,表示摄影机到世界的变换矩阵。您需要的其他数据是简单的针孔摄像机内部函数(hwf = [height, width, focal length])和近/远场景边界。看一看我们的数据加载代码去看更多。
文章出处登录后可见!