算法理论知识
PID算法是工业应用中最广泛算法之一,在闭环系统的控制中,可自动对控制系统进行准确且迅速的校正。PID算法已经有100多年历史,在四轴飞行器,平衡小车、汽车定速巡航、温度控制器等场景均有应用。
PID算法:就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种常见的“保持稳定”控制算法。
1、基础理论知识
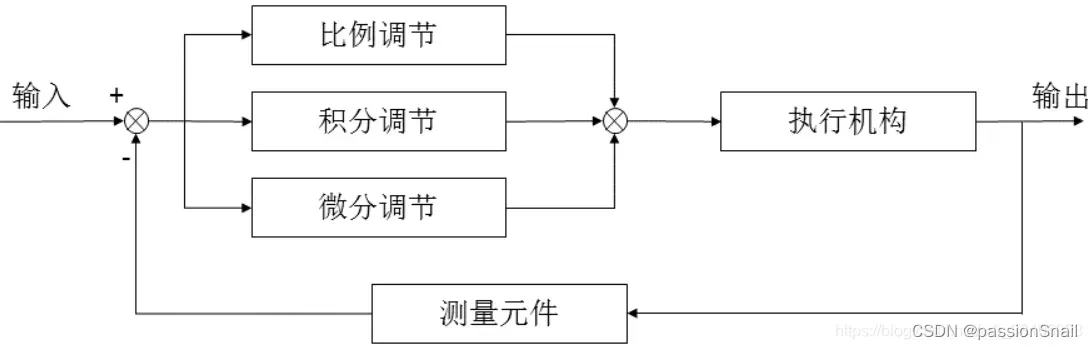
常规的模拟PID控制系统原理框图如下所示:
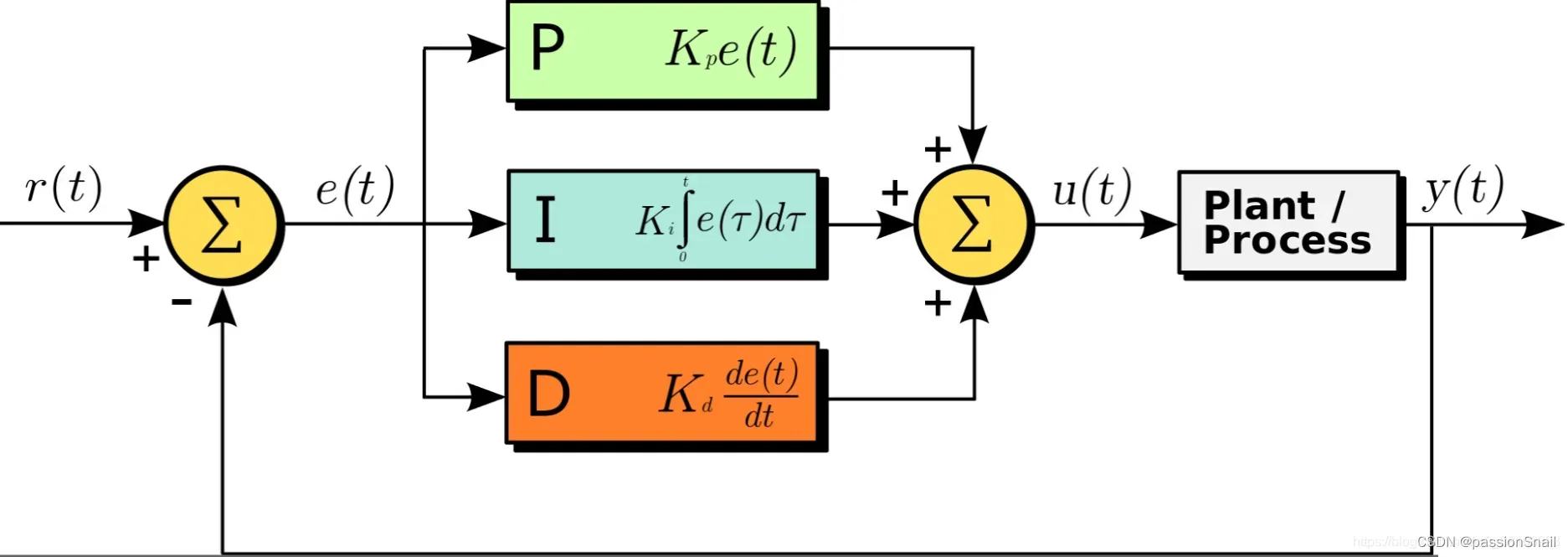
因此可以得出e(t)和u(t)的关系:

其中:
Kp:比例增益,是调适参数;
Ki:积分增益,也是调适参数;
Kd:微分增益,也是调适参数;
e:误差=设定值(SP)- 回授值(PV);
t:目前时间。
2、案例讲解
数学公式可能比较枯燥,通过以下例子,了解PID算法的应用。
例如,使用控制器使一锅水的温度保持在50℃,小于50℃就让它加热,大于50度就断电不就行了?
没错,在要求不高的情况下,确实可以这么干,如果换一种说法,你就知道问题出在哪里了。
如果控制对象是一辆汽车呢?要是希望汽车的车速保持在50km/h不动,这种方法就存在问题了。
设想一下,假如汽车的定速巡航电脑在某一时间测到车速是45km/h,它立刻命令发动机:加速!
结果,发动机那边突然来了个100%全油门,嗡的一下汽车急加速到了60km/h,这时电脑又发出命令:刹车!结果车子一会儿加速,一会儿又立马刹车减速,乘客吐了,肯定要骂人……
所以,在大多数场合中,用“开关量”来控制一个物理量就显得比较简单粗暴了,有时候是无法保持稳定的,因为单片机、传感器不是无限快的,采集、控制需要时间。
而且,控制对象具有惯性,比如将热水控制器拔掉,它的“余热”即热惯性可能还会使水温继续升高一小会。此时就需要使用PID控制算法了。
3、算法参数讲解
接着咱再来详细了解PID控制算法的三个最基本的参数:Kp比例增益、Ki积分增益、Kd微分增益。
(1)、Kp比例增益
Kp比例控制考虑当前误差,误差值和一个正值的常数Kp(表示比例)相乘。需要控制的量,比如水温,有它现在的当前值,也有我们期望的目标值。
当两者差距不大时,就让加热器“轻轻地”加热一下。
要是因为某些原因,温度降低了很多,就让加热器“稍稍用力”加热一下。
要是当前温度比目标温度低得多,就让加热器“开足马力”加热,尽快让水温到达目标附近。
这就是P的作用,跟开关控制方法相比,是不是“温文尔雅”了很多。
实际写程序时,就让偏差(目标减去当前)与调节装置的“调节力度”,建立一个一次函数的关系,就可以实现最基本的“比例”控制了~
Kp越大,调节作用越激进,Kp调小会让调节作用更保守。
若你正在制作一个平衡车,有了P的作用,你会发现,平衡车在平衡角度附近来回“狂抖”,比较难稳住。
(2)、Kd微分增益
Kd微分控制考虑将来误差,计算误差的一阶导,并和一个正值的常数Kd相乘。
有了P的作用,不难发现,只有P好像不能让平衡车站起来,水温也控制得晃晃悠悠,好像整个系统不是特别稳定,总是在“抖动”。

设想有一个弹簧:现在在平衡位置上,拉它一下,然后松手,这时它会震荡起来,因为阻力很小,它可能会震荡很长时间,才会重新停在平衡位置。
请想象一下:要是把上图所示的系统浸没在水里,同样拉它一下 :这种情况下,重新停在平衡位置的时间就短得多。
此时需要一个控制作用,让被控制的物理量的“变化速度”趋于0,即类似于“阻尼”的作用。
因为,当比较接近目标时,P的控制作用就比较小了,越接近目标,P的作用越温柔,有很多内在的或者外部的因素,使控制量发生小范围的摆动。
D的作用就是让物理量的速度趋于0,只要什么时候,这个量具有了速度,D就向相反的方向用力,尽力刹住这个变化。
Kd参数越大,向速度相反方向刹车的力道就越强,如果是平衡小车,加上P和D两种控制作用,如果参数调节合适,它应该可以站起来了。
(3)、Ki积分增益
Ki积分控制考虑过去误差,将误差值过去一段时间和(误差和)乘以一个正值的常数Ki。
还是以热水为例,假如有个人把加热装置带到了非常冷的地方,开始烧水了,需要烧到50℃。
在P的作用下,水温慢慢升高,直到升高到45℃时,他发现了一个不好的事情:天气太冷,水散热的速度,和P控制的加热的速度相等了。
这可怎么办?
P兄这样想:我和目标已经很近了,只需要轻轻加热就可以了。
D兄这样想:加热和散热相等,温度没有波动,我好像不用调整什么。
于是,水温永远地停留在45℃,永远到不了50℃。
根据常识,我们知道,应该进一步增加加热的功率,可是增加多少该如何计算呢?
前辈科学家们想到的方法是真的巧妙,设置一个积分量,只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上。
这样一来,即使45℃和50℃相差不是太大,但是随着时间的推移,只要没达到目标温度,这个积分量就不断增加,系统就会慢慢意识到:还没有到达目标温度,该增加功率啦!
到了目标温度后,假设温度没有波动,积分值就不会再变动,这时,加热功率仍然等于散热功率,但是,温度是稳稳的50℃。
Ki的值越大,积分时乘的系数就越大,积分效果越明显,所以,I的作用就是,减小静态情况下的误差,让受控物理量尽可能接近目标值。
I在使用时还有个问题:需要设定积分限制,防止在刚开始加热时,就把积分量积得太大,难以控制。
4、PID算法参数调试
PID算法的参数调试是指通过调整控制参数(比例增益、积分增益/时间、微分增益/时间)让系统达到最佳的控制效果。
调试中稳定性(不会有发散性的震荡)是首要条件,此外,不同系统有不同的行为,不同的应用其需求也不同,而且这些需求还可能会互相冲突。

PID算法只有三个参数,在原理上容易说明,但PID算法参数调试是一个困难的工作,因为要符合一些特别的判据,而且PID控制有其限制存在。
(1)、稳定性
若PID算法控制器的参数未挑选妥当,其控制器输出可能是不稳定的,也就是其输出发散,过程中可能有震荡,也可能没有震荡,且其输出只受饱和或是机械损坏等原因所限制。不稳定一般是因为过大增益造成,特别是针对延迟时间很长的系统。
(2)、最佳性能
PID控制器的最佳性能可能和针对过程变化或是设定值变化有关,也会随应用而不同。
两个基本的需求是调整能力(regulation,干扰拒绝,使系统维持在设定值)及命令追随 (设定值变化下,控制器输出追随设定值的反应速度)。有关命令追随的一些判据包括有上升时间及整定时间。有些应用可能因为安全考量,不允许输出超过设定值,也有些应用要求在到达设定值过程中的能量可以最小化。
(3)、各调试方法对比
方法 | 优点 | 缺点 |
人工调试 | 不需要数学,可以在线调试 | 需要有经验的工程师 |
齐格勒-尼克尔斯方法 | 被证实有效的方法,可以在线调试 | 会影响制程,需要试误,得到的参数可能使响应太快 |
软件工具 | 调试的一致性,可以在线调试或离线调试,可以配合计算机自动设计,包括阀及感测器的分析,可以下载前进行模拟,可以致远非稳态(NSS)的调试 | 需要成本或是训练 |
Cohen-Coon | 好的程序模型 | 需要一些数学,需要离线调试,只对一阶系统有良好效果 |
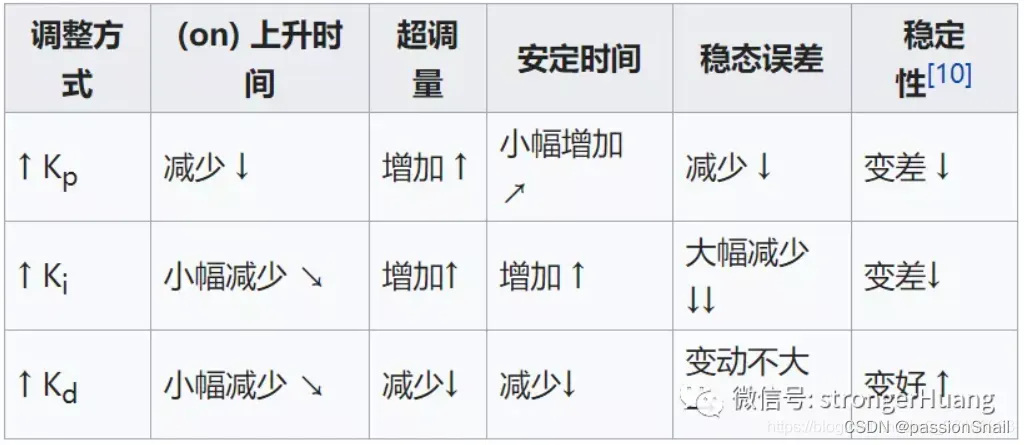
(4)、调整PID参数对系统的影响
一、实验要求
学习PID控制器的基本原理,掌握PID参数的物理调节规律,通过仿真验证PID调节过程。选择例题中的任意两个实验进行仿真研究,改变参数后观察系统的动态性能和稳态性能的变化,确认是否和理论分析一致。
二、实验内容
1、实验1:具有变化积分率的PID控制器
A、代码
% PID Controller with changing integration rate
% 具有变化积分率的PID控制器
clear all;
close all;
clc
% Big time delay Plant 大延时装置
ts=20;
sys=tf([1],[60,1],'inputdelay',80);
dsys=c2d(sys,ts,'zoh');
[num,den]=tfdata(dsys,'v');
u_1=0;
u_2=0;
u_3=0;
u_4=0;
u_5=0;
y_1=0;y_2=0;y_3=0;
error_1=0;error_2=0;
ei=0;
for k = 1:1:200
time(k)=k*ts;
rin(k)=1.0;%Step Signal
%Linear model
yout(k)=-den(2)*y_1+num(2)*u_5;
error(k)=rin(k)-yout(k);
kp=0.45;kd=12;ki=0.0048;
A=0.4;B=0.6;
%T type integration
ei=ei+(error(k)+error_1)/2*ts;
M=1;
if M==1%Changing integration rate
if abs(error(k))<=B
f(k)=1;
elseif abs(error(k))>B&abs(error(k))<=A+B
f(k)=(A-abs(error(k))+B)/A;
else
f(k)=0;
end
elseif M==2 %Not changing integration rate
f(k)=1;
end
u(k)=kp*error(k)+kd*(error(k)-error_1)/ts+ki*f(k)*ei;
if u(k)>=10
u(k)=10;
end
if u(k)<=-10
u(k)=-10;
end
%Return of PID parameters
u_5=u_4;u_4=u_3;u_3=u_2;u_2=u_1;u_1=u(k);
y_3=y_2;y_2=y_1;y_1=yout(k);
error_2=error_1;
error_1=error(k);
end
figure(1);
plot(time,rin,'b',time,yout,'r');
xlabel('time(s)');ylabel('rin,yout');
figure(2);
plot(time,f,'r');
xlabel('time(s)');ylabel('Integration rate f');B、实验结果
(1)默认效果
在没有更改代码的情况下,实验的效果如图一所示。
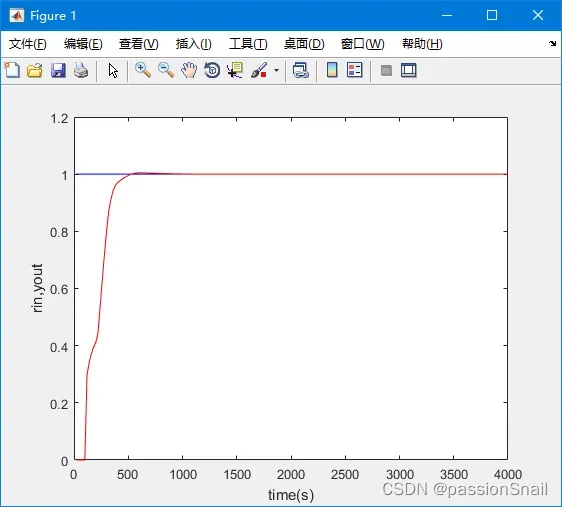
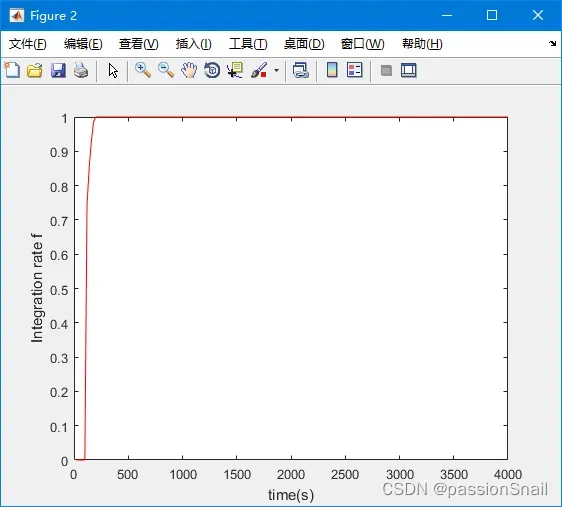
图一
(2)改变kp
①增大kp,理论上可以看到pid调节的更快更陡。实际效果如图2。Kp=3.
kp=3;kd=12;ki=0.0048;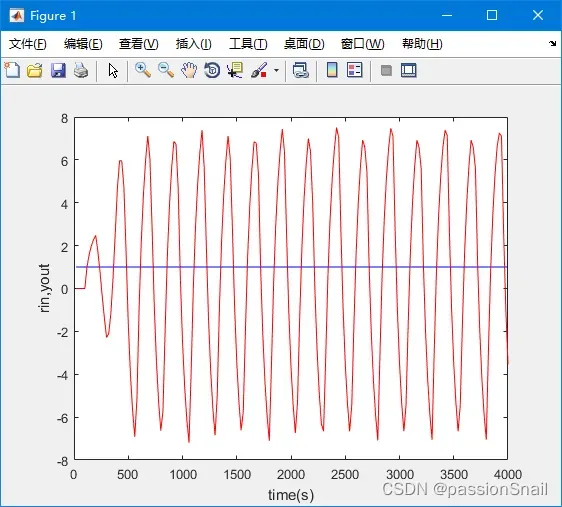
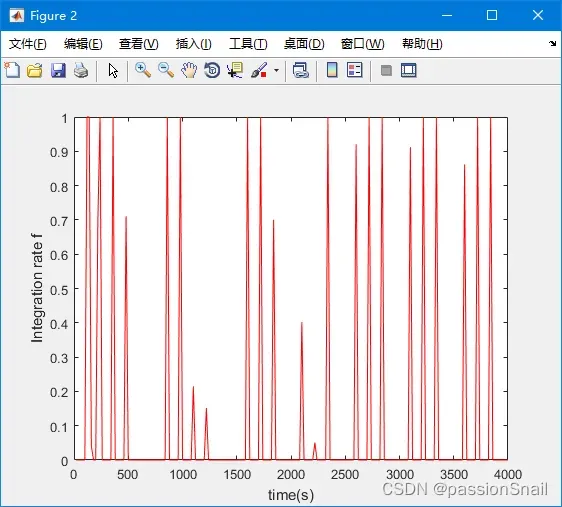
图2
实际上产生了自激震荡,说明kp不能调的过大,否则系统会不稳定。
②减小kp,理论上系统调节缓慢,会产生超调量,调节曲线不平滑,有毛刺。Kp=0.1
kp=0.1;kd=12;ki=0.01;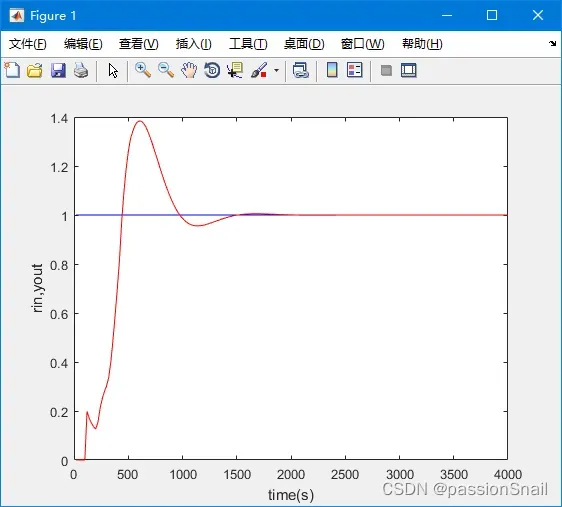
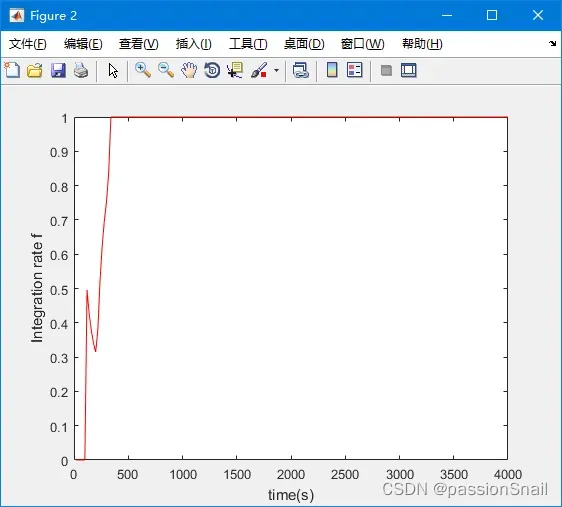
图3
实际上也证明比例系数太小,系统变化时调节相对缓慢。
(3)改变kd
①增大kd,理论上系统稳定时波动很大,精度不高,且有很多毛刺与抖动。Kd=30.
kp=0.45;kd=30;ki=0.0048;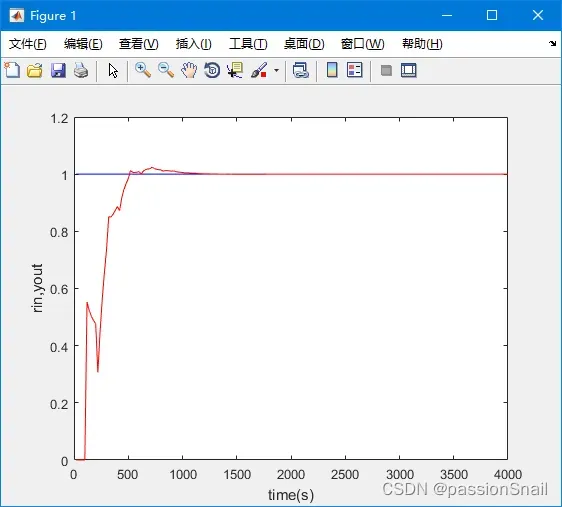
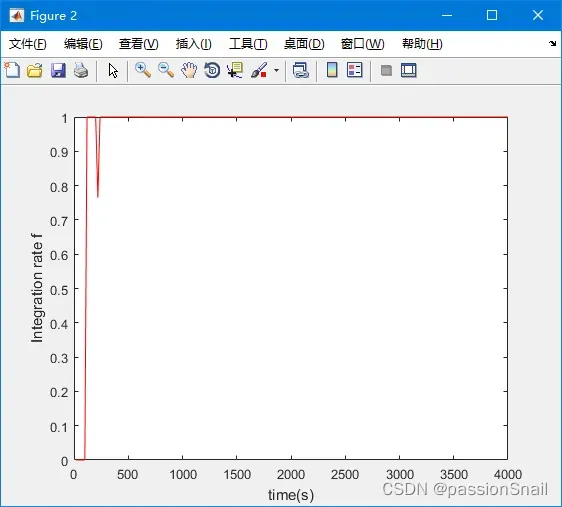
图4
实际上系统开始调节时会有些尖峰,调节曲线不平滑。
②减小kd,理论上系统调节稳定时变化缓慢,会有些超调量。Kd=3.
kp=0.45;kd=3;ki=0.0048;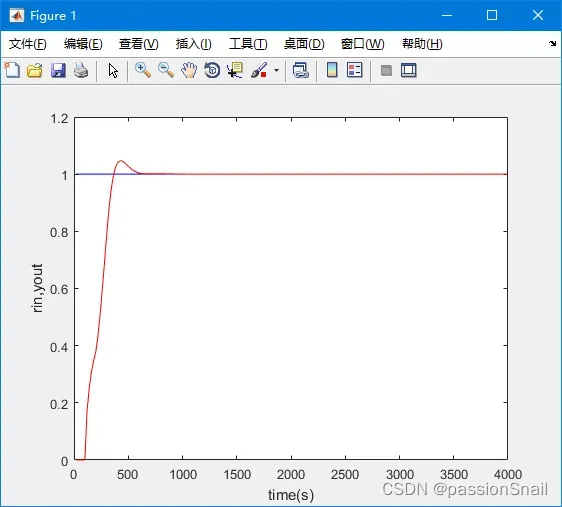
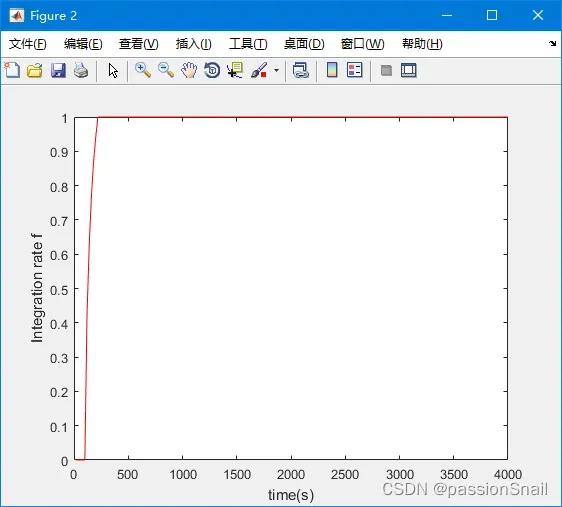
图5
实际上也可以看出减小kd对系统影响不大,只是在系统刚进入稳定状态时有一个小小的超调量。
(4)改变ki
①增大ki,积分变大,系统系统变得不稳定,抖动波动很厉害。
kp=0.45;kd=3;ki=0.01;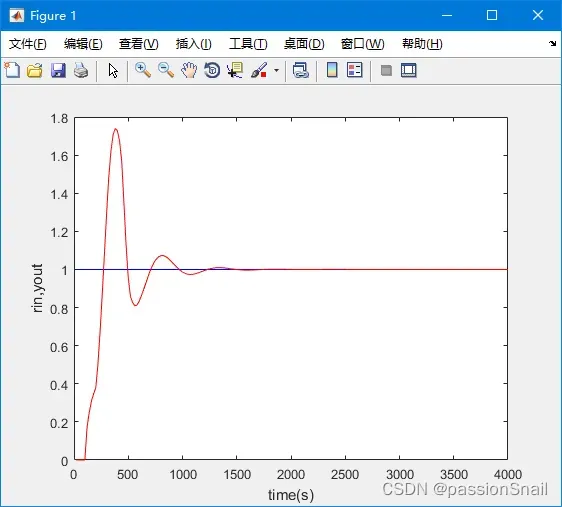
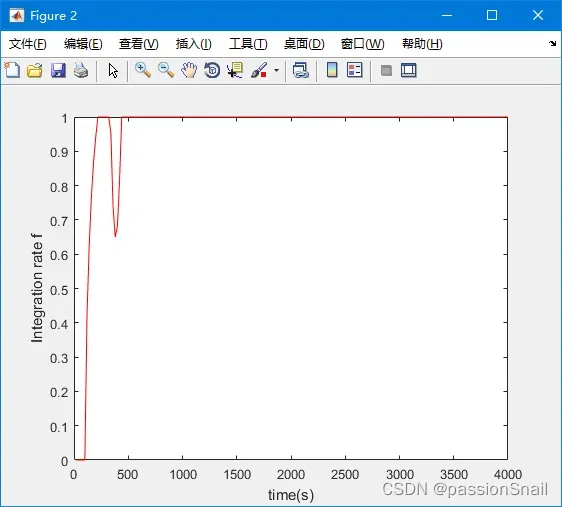
图6
实际上可以其变化幅度大,超调量很高,系统很不稳定。
②减小ki,系统调节变慢,系统可能无法调节。
kp=0.45;kd=12;ki=0.001;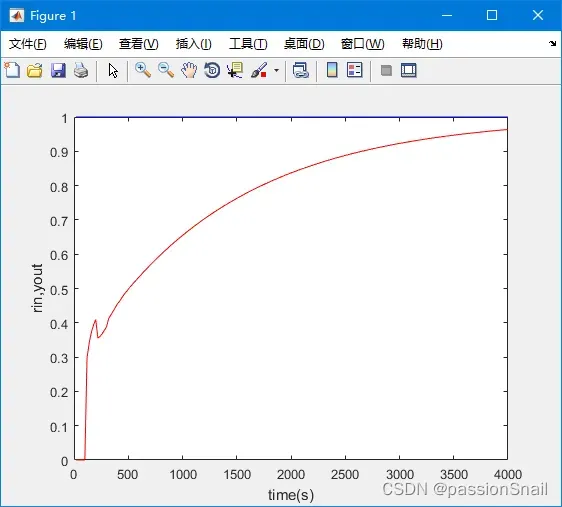
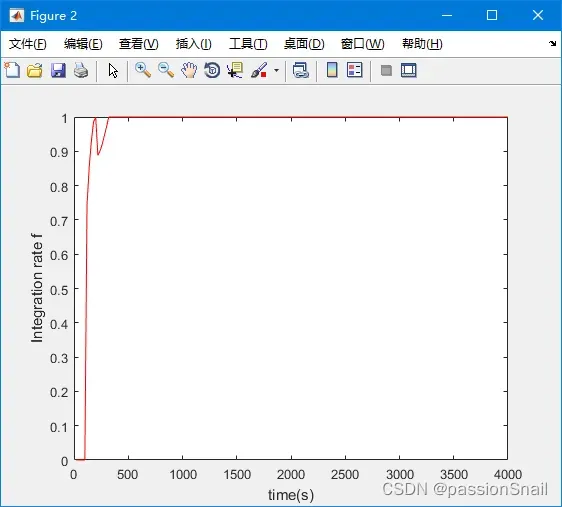
图7
系统无法达到设定的稳态值,无法调节。
2、实验2:串联系统控制
A、代码
%Series System Control 串联系统控制
clear all;
close all;
clc
ts=2;
sys1=tf(1,[10,1]);
dsys1=c2d(sys1,ts,'z');
[num1,den1]=tfdata(dsys1,'v');
sys2=tf(1,[10,1]);
dsys2=c2d(sys2,ts,'z');
[num2,den2]=tfdata(dsys2,'v');
dph=1/zpk('z',ts);
Gc2=dph/(dsys2*(1-dph));
[nump,denp]=tfdata(Gc2,'v');
u1_1=0.0;u2_1=0.0;
y1_1=0;y2_1=0;
e2_1=0;ei=0;
for k=1:1:2000
time(k)=k*ts;
r1(k)=1;
%Linear model
y1(k)=-den1(2)*y1_1+num1(2)*y2_1;%Main plant
y2(k)=-den2(2)*y2_1+num2(2)*u2_1;%Assistant plant
error(k)=r1(k)-y1(k);
ei=ei+error(k);
u1(k)=1.2*error(k)+0.02*ei;%Main Controller
e2(k)=u1(k)-y2(k);%Assistant Controller
u2(k)=-denp(2)*u2_1+nump(1)*e2(k)+nump(2)*e2_1;
d2(k)=0.01*rands(1);
u2(k)=u2(k)+d2(k);
%----------Return of PID parameters------------
u1_1=u1(k);
u2_1=u2(k);
e2_1=e2(k);
y1_1=y1(k);
y2_1=y2(k);
end
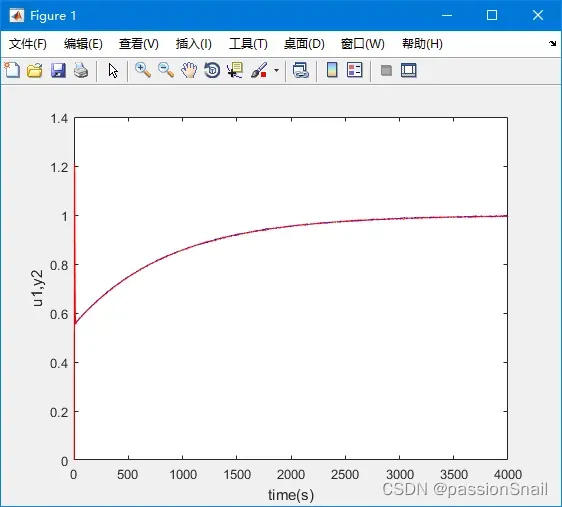
figure(1);%Assistant Control
plot(time,u1,'b',time,y2,'r');
xlabel('time(s)');ylabel('u1,y2');
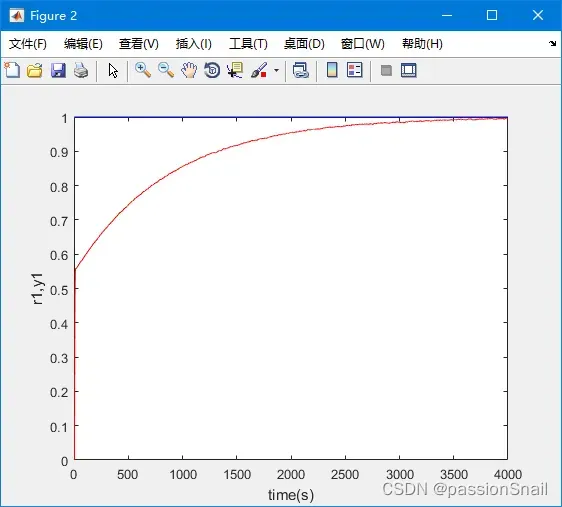
figure(2);%Main Control
plot(time,r1,'b',time,y1,'r');
xlabel('time(s)');ylabel('r1,y1');
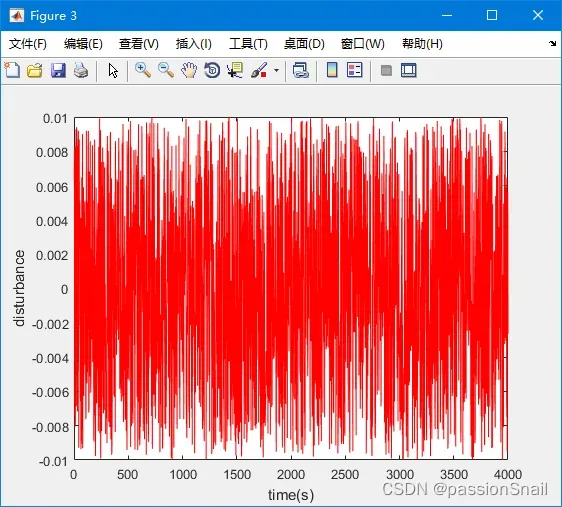
figure(3);
plot(time,d2,'r');
xlabel('time(s)');ylabel('disturbance');B、实验效果
(1)默认效果
在没有更改源代码的情况下,实验的结果如下所示
kp = 1.2;ki = 0.2;kd = 0.01;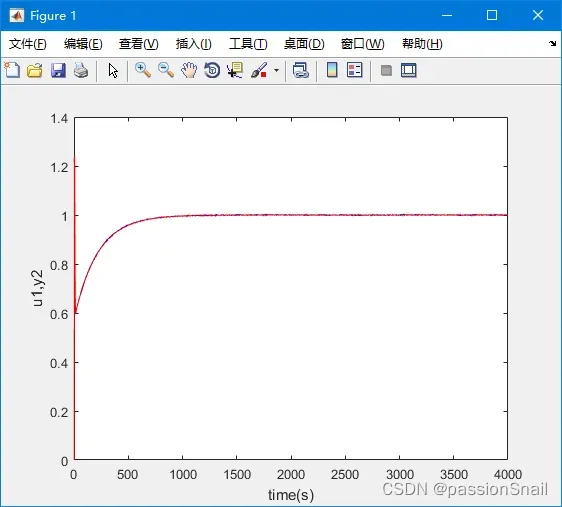
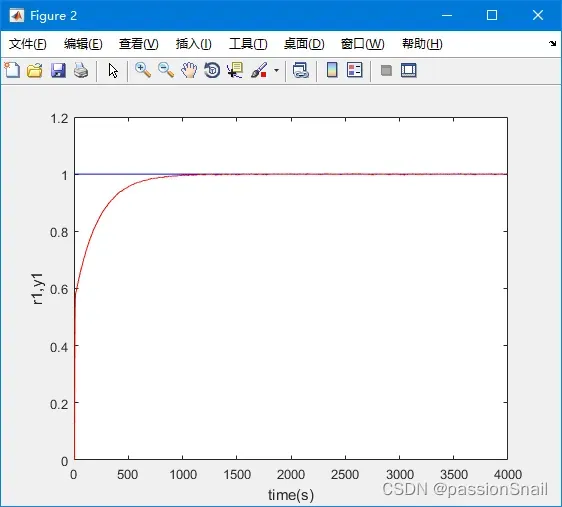
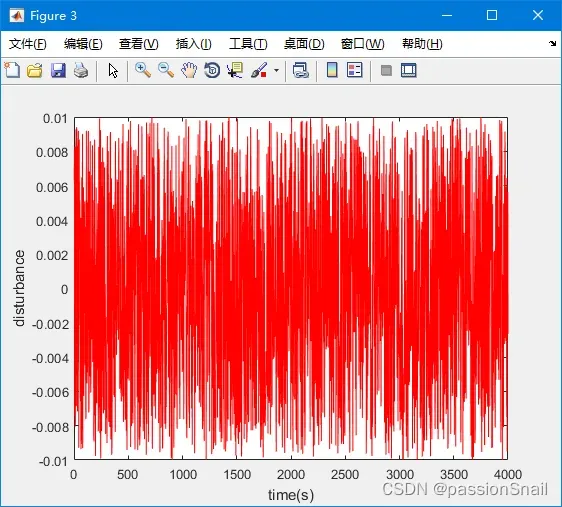
图8
第3个图是随机数的随时间的分布。
同理,改变kp,ki的值,系统会发生改变。
(2)改变kp
①增大kp,系统变化会更快,会有超调量。Kp=3.
kp = 3;ki = 0.02;kd = 0.01;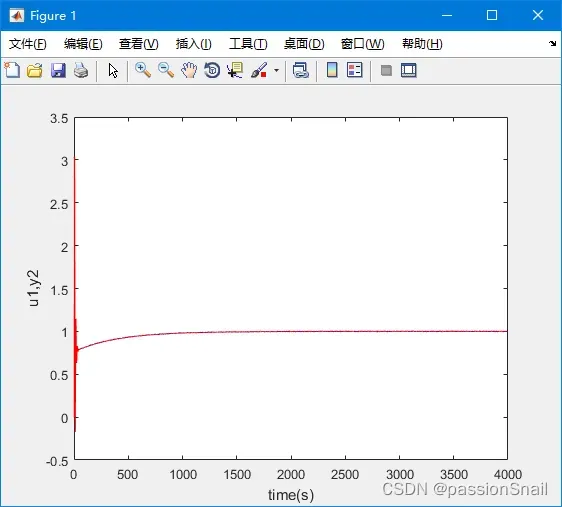
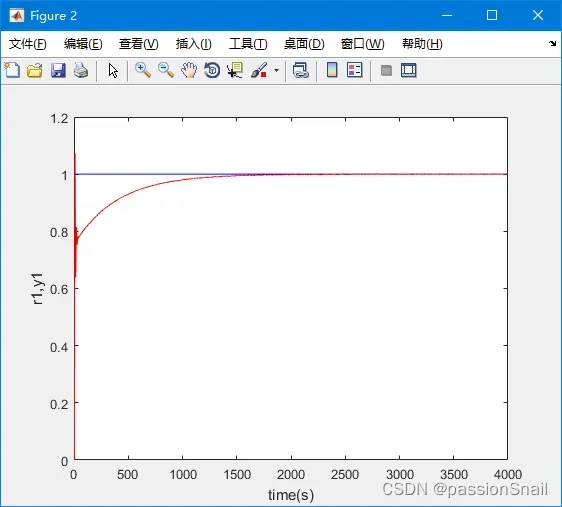
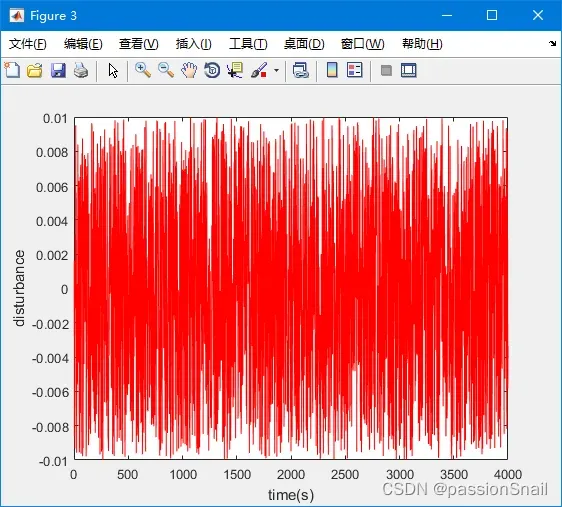
图9
实际没有发现系统有超调量,但在系统开始调节得时候会会产生尖峰脉冲,系统调节很快。
②减小kp,系统调节缓慢,但系统稳定。
kp = 0.1;ki = 0.02;kd = 0.01;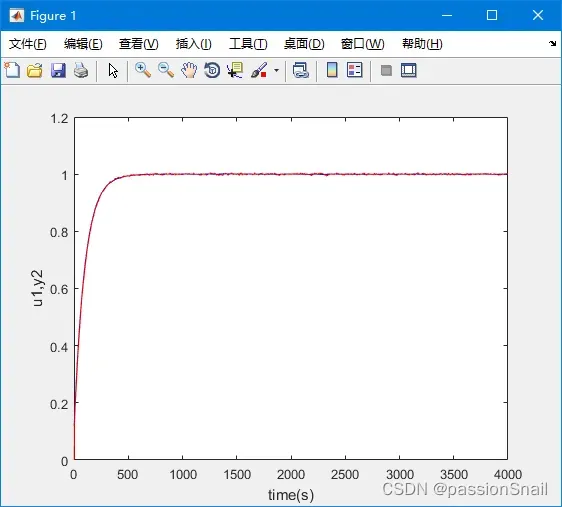
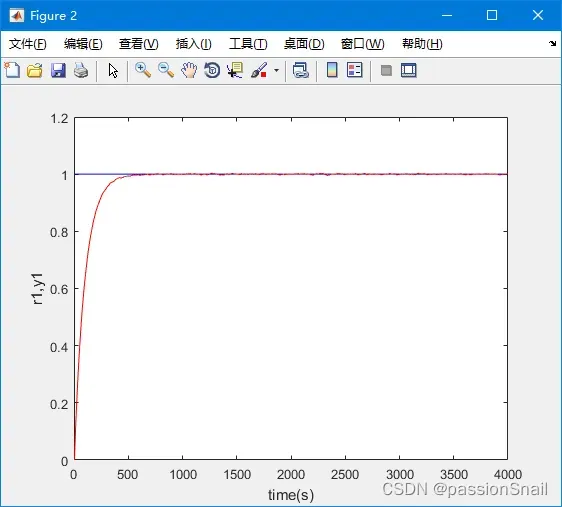
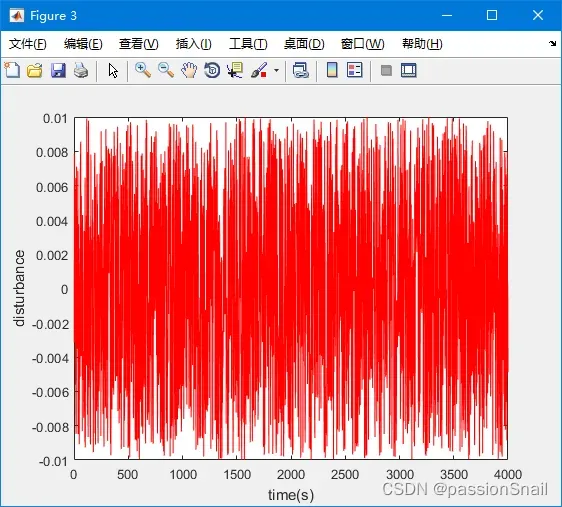
图10
结果可以看出系统调节很稳定,但调节时间有点长。
(3)该变ki
①增大ki,系统很快达到稳定,调节速度快.ki=0.2
kp = 1.2;ki = 0.2;kd = 0.01;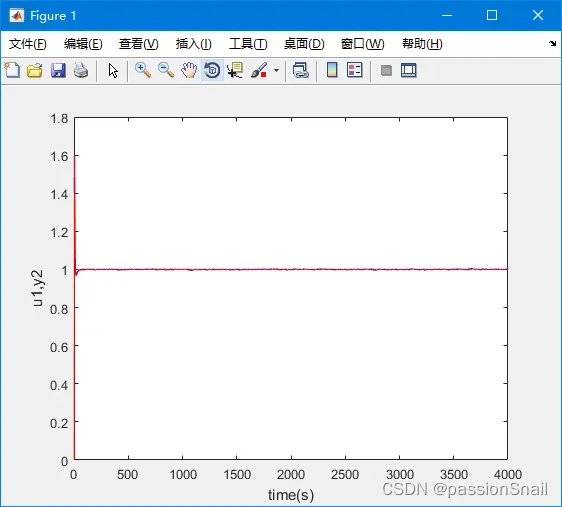
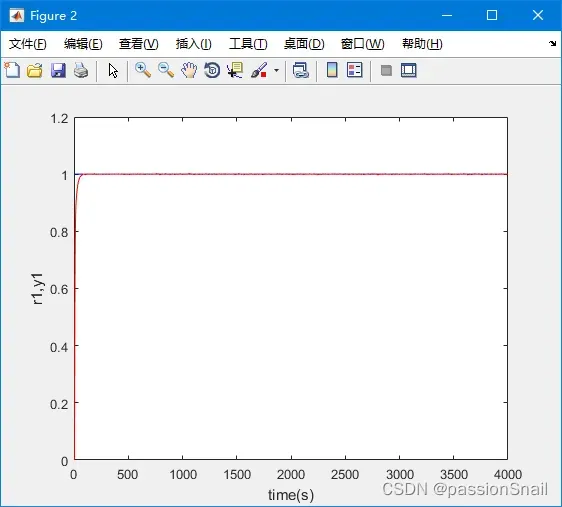
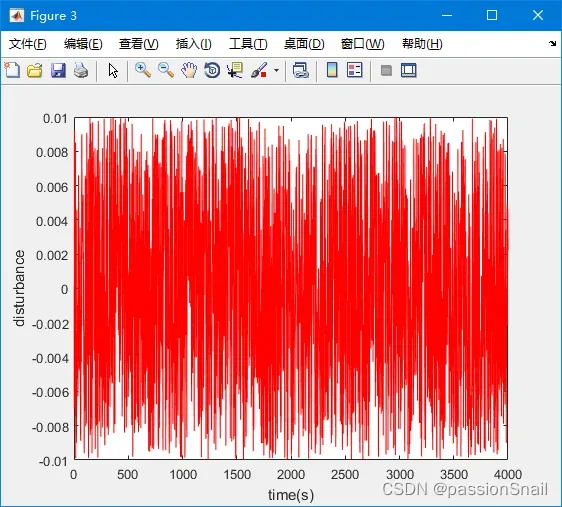
图11
结果显示系统在转换开始时系统产生了尖峰脉冲,然后很快地达到稳定。
②减小ki,系统会很慢的达到稳定.ki=0.005。
如图12
结果显示系统经过相当漫长的时间达到了稳定状态。
三、实验感想
通过此在MATLAB上运用pid,对pid 的实际作用有了基本了解。对于kp,要选取的合适,不能过大,否则会产生震荡,过小可能会产生超常量,调节缓慢。对于kd,太大了产生毛刺抖动,太小了会有些超常量。对于ki,太大了调节很快,但会产生过冲,尖峰脉冲,太小了调节很慢,可能无法调试达到稳定状态。
总结这3点,在调试pid时,kp应从小到大调试,kd从小到大调试,ki从小到大调试。每次只调一个参数,直到最满意的时候,再调下个参数。
文章出处登录后可见!