前言
通过本文可以了解到
- 什么是图像的距离?
- 什么是距离变换
- 距离变换的计算
- OpenCV中距离变换的实现
什么是图像的距离?
距离(distance)是描述图像两点像素之间的远近关系的度量,常见的度量距离有欧式距离(Euchildean distance)、城市街区距离(City block distance)、棋盘距离(Chessboard distance)。
- 欧式距离
欧式距离的定义源于经典的几何学,与我们数学中所学的简单几何的两点之间的距离一致,为两个像素点坐标值得平方根。欧式距离的优点在于其定义非常地直观,是显而易见的,但缺点在于平方根的计算是非常耗时的。
De = sqrt(((x2 - x1)*(x2 - x1) + (y2 - y1)*(y2 - y1)));
- 城市街区距离
城市街区距离也称D4距离,此距离描述的是只允许像素坐标系平面中横向和纵向的移动距离,4表示在这种定义下,像素点是4邻接的,即每个点只与它的上、下、左、右相邻的4个点之间的距离为1。其定义为
D4 = abs(x1 - x2) + abs(y1 - y2);
- 棋盘距离
如果允许在图像坐标系中像素点的对角线方向的移动,就可以得到棋盘距离,也称D8距离,8表示在这种定义下,像素点是8邻接的,即每个点只与它的上、下、左、右、四个对角线方向相邻的8个点之间的距离为1。
D8 = max(abs(x1 - x2), (y1 - y2));
图1表示了三个距离之间的关系
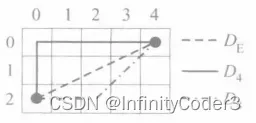
图1 三种距离示意图
什么是距离变换?
距离变换也叫作距离函数或者斜切算法。它是距离概念的一个应用,图像处理的一些算法以距离变换为基础。距离变换描述的是图像中像素点与某个区域块的距离,区域块中的像素点值为0,临近区域块的像素点的值较小,离它越远值越大。
图2是一个简单距离转换的例子,使用的棋盘距离
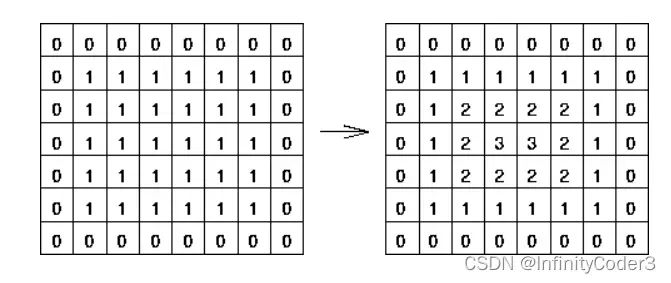
图2 棋盘距离变换例子
距离变换算法步骤
直观计算
确定了距离公式之后,根据直观的理解应该怎么计算呢?还是拿上面的例子进行说明,B代表着黑色背景的集合,里面有b1, b2, b3……等一些点;W代表着白色物体的集合,里面有w1,w2,w3……等一些点。现在我们就是要计算W集合里面的每一个点,到B集合的距离,那么我们就每一次取一个W里面的wi,然后根据距离公式,计算wi到B集合每一个点bj的距离Dij,取其中距离Dij 最小的值,作为最后的度量结果,直到W集合的每一个点都计算一遍。实际上,在进行计算距离这一步之前,还要遍历图像把像素点分成两个集合,这种直观的计算相对来说,较复杂且花费时间较长,因此前人发明一种快速计算距离变换的方法。
快速计算
对于欧式距离变换算法,相关学者研究了速度更快的倒角距离变换算法,来近似欧式距离变换的效果。具体过程如下:
- 使用前向模板如图3中左边
3*3模板,对图像从上到下,从左到右进行扫描,模板中心0点对应的像素值如果为0则跳过,如果为1则计算模板中每个元素与其对应的像素值的和,分别为Sum1,Sum2,Sum3,Sum4,Sum5,而中心像素值为这五个和值中的最小值。 - 使用后向模板如图Fig.3中右边的
3*3模板,对图像从下到上,从右到左进行扫描。 - 一般我们使用的倒角距离变换模板为
3 * 3和5 * 5,分别如下图所示:
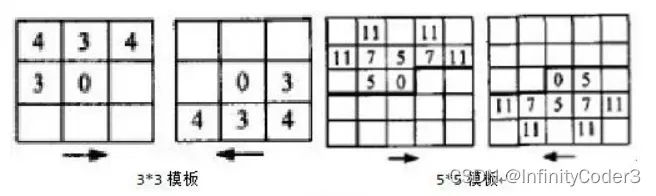
图3 倒角距离变换模板
示例
AL AL
AL P mask1
AL
BR
P BR mask2
BR BR
- 将图像进行二值化,子图像值为0,背景为255;
- 利用Mask 1从左向右,从上到下扫描,p点是当前像素点,q点是Mask 1中AL邻域中的点,D为距离计算,包括棋盘距离、城市距离和欧式距离。Fp为p点的像素值,计算
F(p) = min( F(p), F(q)+D(p,q) ), 其中,q属于AL.
- 再利用Mask 2从右向左,从下向上扫描,计算
F(p) = min( F(p), F(q)+D(p,q) ), 其中,q属于BR.
代码实现距离变换算法
void imageprocess::DistanceTransform(const cv::Mat& src_image, cv::Mat& dst_image)
{
//step1: check the input parameters: 检查输入参数
assert(!src_image.empty());
assert(src_image.channels() == 1);
//step2: initialize dst_image : 初始化目标图像
cv::threshold(src_image, dst_image, 100, 255, cv::THRESH_BINARY);
//step3: pass throuth from top to bottom, left to right: 从上到下,从做到右遍历
for (size_t i = 1; i < dst_image.rows - 1; i++)
{
for (size_t j = 1; j < dst_image.cols; j++)
{
//AL AL
//AL P
//AL
std::array<cv::Point, 4> AL;
AL.at(0) = cv::Point( i - 1, j - 1 );
AL.at(1) = cv::Point( i - 1, j );
AL.at(2) = cv::Point( i, j - 1 );
AL.at(3) = cv::Point(i + 1, j - 1 );
int Fp = dst_image.at<uchar>(i, j);
//Fq
std::array<int, 4> Fq = { 0 };
Fq.at(0) = dst_image.at<uchar>(i - 1, j - 1);
Fq.at(1) = dst_image.at<uchar>(i - 1, j);
Fq.at(2) = dst_image.at<uchar>(i, j - 1);
Fq.at(3) = dst_image.at<uchar>(i + 1, j - 1);
std::array<int, 4> Dpq = { 0 };
std::array<int, 4> DpqAddFq = { 0 };
for (size_t k = 0; k < 4; k++)
{
//D(p, q)
Dpq.at(k) = D4(i, AL.at(k).x, j, AL.at(k).y);
//D(p,q) + F(q)
DpqAddFq.at(k) = Dpq.at(k) + Fq.at(k);
}
//F(p) = min[F(p), D(p,q) + F(q)]
std::sort(DpqAddFq.begin(), DpqAddFq.end());
auto min = DpqAddFq.at(0);
Fp = std::min(Fp, min);
dst_image.at<uchar>(i, j) = Fp;
}
}
//step4: pass throuth from bottom to top, right to left: 从下到上,从右到左遍历
for (int i = dst_image.rows - 2; i > 0; i--)
{
for (int j = dst_image.cols - 2; j >= 0 ; j--)
{
// BR
// P BR
// BR BR
std::array<cv::Point, 4> BR;
BR.at(0) = cv::Point( i - 1, j + 1 );
BR.at(1) = cv::Point( i , j + 1 );
BR.at(2) = cv::Point( i + 1, j + 1 );
BR.at(3) = cv::Point( i + 1, j );
int Fp = dst_image.at<uchar>(i, j);
//Fq
std::array<int, 4> Fq = { 0 };
Fq.at(0) = dst_image.at<uchar>(i - 1, j + 1);
Fq.at(1) = dst_image.at<uchar>(i, j + 1);
Fq.at(2) = dst_image.at<uchar>(i + 1, j + 1);
Fq.at(3) = dst_image.at<uchar>(i + 1, j);
std::array<int, 4> Dpq = { 0 };
std::array<int, 4> DpqAddFq = { 0 };
for (size_t k = 0; k < 4; k++)
{
//D(p, q)
Dpq.at(k) = D4(i, BR.at(k).x, j, BR.at(k).y);
//D(p,q) + F(q)
DpqAddFq.at(k) = Dpq.at(k) + Fq.at(k);
}
//F(p) = min[F(p), D(p,q) + F(q)]
std::sort(DpqAddFq.begin(), DpqAddFq.end());
auto min = DpqAddFq.at(0);
Fp = std::min(Fp, min);
dst_image.at<uchar>(i, j) = static_cast<uchar>(Fp);
}
}
}
int imageprocess::D4(const int& x1, const int& x2, const int& y1, const int& y2)
{
return abs(x1 - x2) + abs(y1 - y2);
}
int imageprocess::D8(const int& x1, const int& x2, const int& y1, const int& y2)
{
return cv::max(abs(x1 - x2), (y1 - y2));
}
OpenCV distanceTransform函数
- 函数签名
/** @overload
@param src 8-bit, single-channel (binary) source image.
@param dst Output image with calculated distances. It is a 8-bit or 32-bit floating-point,
single-channel image of the same size as src .
@param distanceType Type of distance, see #DistanceTypes
@param maskSize Size of the distance transform mask, see #DistanceTransformMasks. In case of the
#DIST_L1 or #DIST_C distance type, the parameter is forced to 3 because a \f$3\times 3\f$ mask gives
the same result as \f$5\times 5\f$ or any larger aperture.
@param dstType Type of output image. It can be CV_8U or CV_32F. Type CV_8U can be used only for
the first variant of the function and distanceType == #DIST_L1.
*/
CV_EXPORTS_W void distanceTransform( InputArray src, OutputArray dst,
int distanceType, int maskSize, int dstType=CV_32F);
参数详解:
- InputArray src:输入图像,一般为二值图像;
- OutputArray dst:输出的图像,距离变换结果,灰度图;
- int distanceType:用于距离变换的距离类型(欧氏距离:DIST_L2 = 2;
距离:DIST_L1 = 1;
距离:DIST_C = 3等);
- int mask_size:距离变换掩模的大小,一般为3或5;
- int dstType:输出图像的数据类型,可以为CV_8U或CV_32F。
测试代码
#include<opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
//初始化输入图像和变换结果图像
Mat mat(480, 480, CV_8UC1, Scalar(0)), transMatE, transMatD4, transMatD8;
//给输入图像指定三个像素点作为距离变换原点(区域块)
mat.at<uchar>(100, 200) = 1;
mat.at<uchar>(200, 100) = 1;
mat.at<uchar>(300, 300) = 1;
//将将输入图像中1和0调换,使得原点距离为0
mat = 1 - mat;
//显示原始图像(显示为黑色)
imshow("原始图片", mat);
//分别利用欧式距离、D4距离和D8距离作距离变换,将结果存入transMatD4、transMatD8和transMatE
distanceTransform(mat, transMatE, DIST_L2, 0);
distanceTransform(mat, transMatD4, DIST_L1, 0, CV_8U);
distanceTransform(mat, transMatD8, DIST_C, 0);
//欧式距离与D8距离作变换后,值为32位浮点数,以下代码将其值转为uchar类型
transMatE.convertTo(transMatE, CV_8U);
transMatD8.convertTo(transMatD8, CV_8U);
//显示距离变换结果
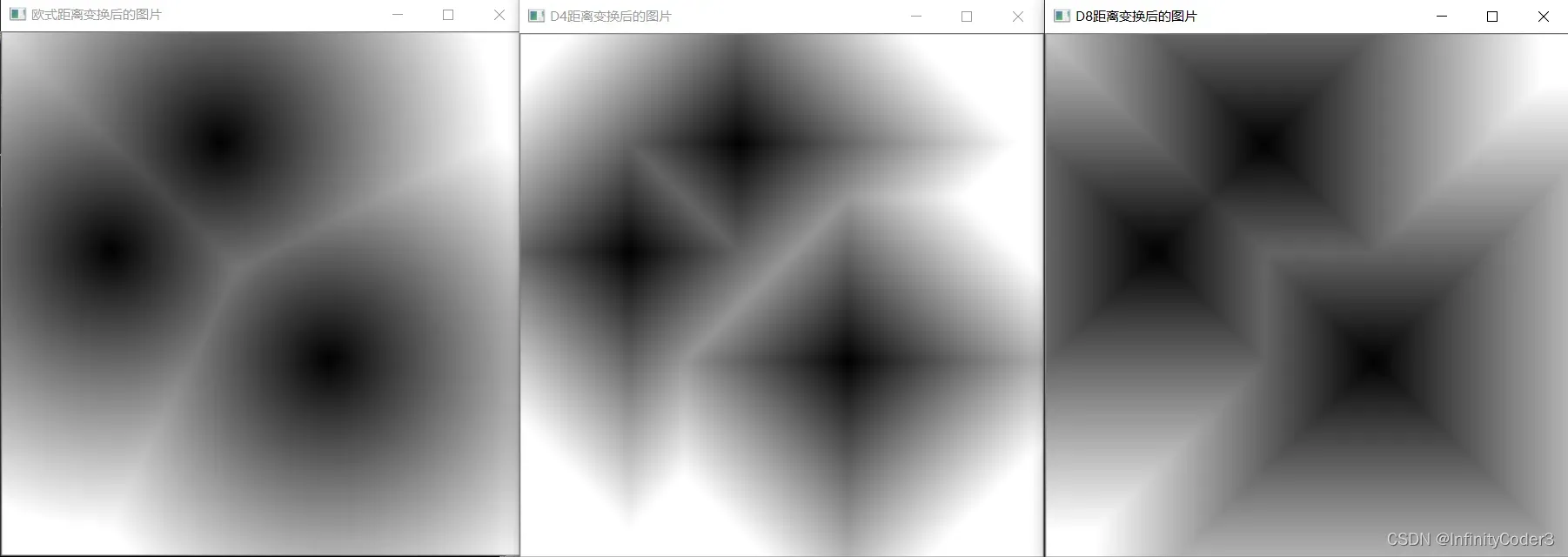
imshow("欧式距离变换后的图片", transMatE);
imshow("D4距离变换后的图片", transMatD4);
imshow("D8距离变换后的图片", transMatD8);
waitKey();
return 0;
}
运行结果
参考资料
- https://mangoroom.cn/opencv/distance-transfer.html
- https://blog.csdn.net/qq_35535744/article/details/95247601
- https://zhuanlan.zhihu.com/p/38917770
- https://medium.com/on-coding/euclidean-distance-transform-d37e06958216
- https://blog.csdn.net/Trent1985/article/details/18081761
文章出处登录后可见!