文章目录
前言
Andruav 是一个基于安卓的互联系统,它将安卓手机作为公司计算机,为你的无人机和遥控车增添先进功能。
5 Andruav Web Client
Web-Client 是一个网站,你可以通过它跟踪和控制无人机。
网络客户端 URL:https://cloud.ardupilot.org:8001/webclient.html。
主要功能
1. 能够同时控制多架无人机。
2. 能同时串流多架无人机的视频。
3. 可根据手机功能进行变焦拍照。
4. 可将游戏手柄直接与网络连接,流畅地驾驶无人机。
5. 能够使用网络 UDP 遥测技术(Web UDP Telemetry)连接 QGroundControl 或任务计划器。
6 Andruav Telemetry
目录:
Andruav 与基于 Ardupilot 的飞行控制板集成(Ardupilot-based flight control boards)。Andruav 可以通过蓝牙、USB、TCP 和 UDP 连接到这些控制板。
下面这段视频可能是遥控遥测距离的破纪录之作。在下面的视频中,你可以看到一辆汽车在埃及开罗被控制,驾驶员在美国洛杉矶。Andruav 12,193 km 遥控汽车演示。
在美国拍摄的第一段视频。
而第二个是在埃及抓获的。
这两段视频完全相同,都是从两个地方拍摄的。
!Tip
这里(here)的 Andruav 12,193 km 遥控汽车演示是通过 Andruav 遥测技术将操纵杆连接到任务计划器完成的。不过建议直接使用游戏手柄(GamePad Directly)。
7 Andruav高级功能
目录:
- Andruav RC Blocking
- Andruav TX Freeze
- Andruav GEO-Fencing
- Andruav GamePad Navigation
- Andruav GPS Injection
Andruav 不仅仅是 4G 遥测或视频流。它有许多与众不同的细节和逻辑。
8 将Andruav与SITL配合使用
你不需要拥有真正的无人机来测试 Andruav 的功能。实际上,在实际使用无人机进行长距离飞行之前,建议使用 SITL 模拟来测试 Andruav。
如果你想体验更真实的操作,也许可以试试 Webots SITL,体验一下使用 Andruav 的真实感受。
连接到SITL
Andruav 与 SITL 或 Webots-SITL 的连接方式相同。最简单的方法是将 Andruav-Drone 手机 FCB 屏幕设置为使用 UDP 连接。你需要指定监听端口。在 SITL 模拟器中,确保通过指定端口向移动 IP 地址发送 UDP 数据包。
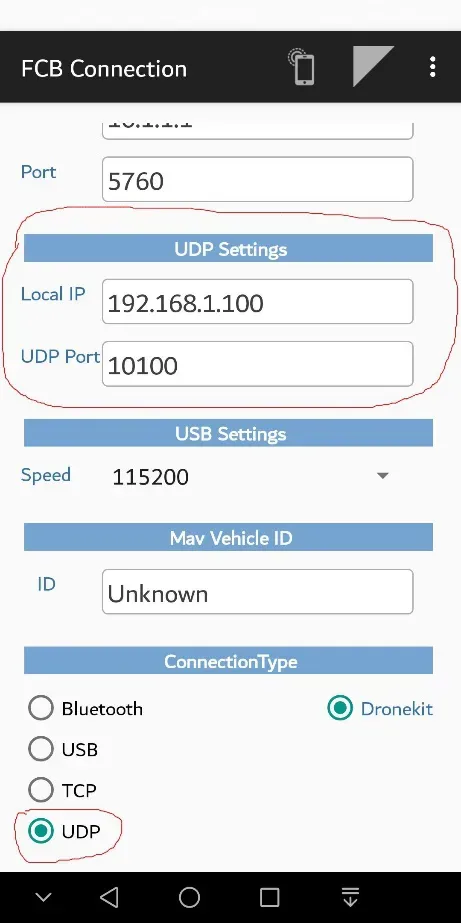
$ ~/ardupilot/Tools/autotest/sim_vehicle.py -j4 -v ArduCopter -M –out=udpout:127.0.0.1:14550 –out=udpout:192.168.1.100:10100
上述示例将 UDP 数据包发送到 127.0.0.1 端口 14550 和 192.168.1.100 端口 10100。因此,你可以使用未连接到 Andruav 的单独 Mission Planner 或 QGC 来并行测试无人机。
!Tip
为手机提供静态 IP,这样就不需要每次都更改 IP 地址。
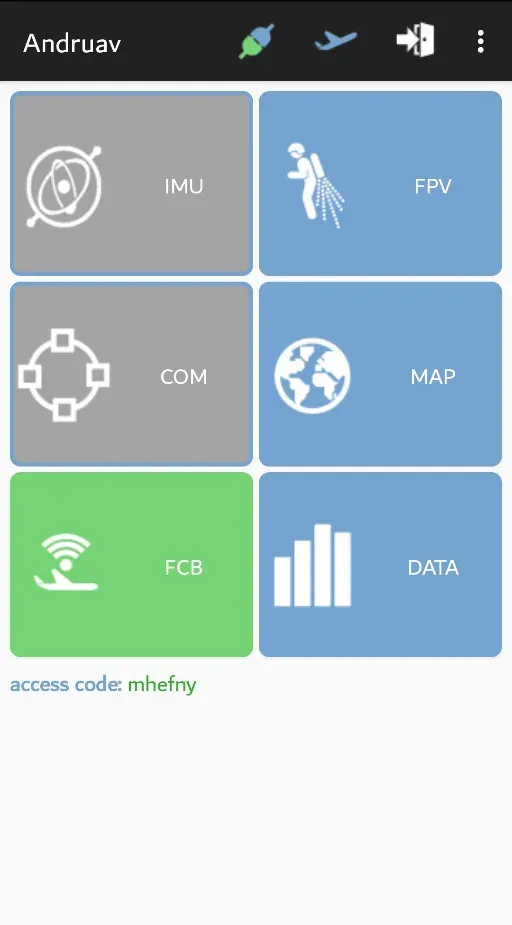
一旦 Andruav 与 FCB 板连接,它就会发出提示,FCB 按钮也会变成绿色。
9 FAQ
1. 我不理解本网站和 Andruav 应用程序中的许多术语。
请访问术语表页面。
2. 为什么 Andruav 应用程序要求大量权限?
Andruav 是一款复杂的应用程序,可通过蓝牙、USB 和 Wifi 访问控制板。它还能访问 GPS、指南针、摄像头等传感器。Andruav 可通过互联网和 3G/4G 与服务器通信。所有这些操作都需要 Android 应用程序的权限才能执行。
3. 我无法获取我的访问代码。
首次注册 Andruav 时,应将 Andruav 设置为 GCS 模式。然后进入注册界面,输入你的电子邮件并按注册。将创建一个访问代码并将其放入访问代码框中。此外,它还会通过电子邮件发送给你–可能会出现在垃圾邮件区。你可以通过网络创建权限有限的子访问代码。请查看 Andruav 入门(Andruav Getting Started)了解更多详情。
4. Andruav 在哪里将图像和视频存储到我的手机上?
手机中有一个名为 AndruavKML 的文件夹,这些文件夹包含每个飞行的子文件夹。每个子文件夹都包含 #. 飞行路径的 KML 文件,并在其上显示图像。可以使用谷歌地球应用程序浏览该文件。#. 一个文件夹,包含该次飞行期间拍摄的所有图像。图像以 jpg 格式存储,并带有地理标记。可将飞行文件夹复制到笔记本电脑上,然后点击 KML 文件,谷歌地球就会显示路径,图像也会出现在地图上。
5. 可以同时连接多少架无人机和 GCS?
理论上无限制。这取决于你的网络质量和传输的数据类型,也取决于你的无人机设备。要想获得较高的响应时间,你需要使用质量更好的 Andruav-Drone 设备。
6. 什么是”小组“,为什么是”1“?
Andruav 群组是指无人机和 GCS 之间相互影响的群组。一个 Andruav 账户可以拥有多个群组。不同的组不能相互交互。默认情况下,Andruav 禁用此功能,你可以通过”设置菜单“启用它,默认情况下你只有一个组,组号为”1“。
7. 什么是网络插件
Web Plugin 是一个可在 Windows 或 Ubuntu 上运行的小型应用程序。它允许你将 Andruav WebClient 连接到 Mission Planner、QGround Control 或任何 GCS,而无需使用 Andruav GCS 移动应用程序。你可以直接从网络使用遥测功能。请查看网络插件(Web Plugin)了解更多详情。
8. 智能遥测等级
智能遥测是 Andruav 的一项功能,可使其在发送遥测数据时使用更少的带宽。这对你的数据套餐非常有用。它能让你在网络速度较慢的情况下获得良好的性能。不同的级别意味着发送的数据包较少,一些非重要数据包几乎被过滤掉。级别越高,所需的带宽和连接速度越低,GCS 上的屏幕更新也越少。
9. 我可以将 USB 相机连接到 Andruav 移动应用程序吗?
你可以使用内置手机摄像头,包括变焦和闪光灯。目前还不支持外置摄像头。
10 术语表
GSC:这就是地面控制站。地面控制站可以是以地面控制站模式运行的 Andruav 应用程序、WebClient 或Mission Planner和 QGroundControl 等应用程序。
Drone Mode:安装在无人机上的手机应在无人机模式下运行。这对于与飞行控制板通信、捕捉图像和所有其他信息非常重要。
FCB:飞行控制板;这是运行 Ardupilot 固件(Ardupilot firmware)的 PixHawk 或类似板。
Pin Code:字母数字文本,用于在特定手机上唯一标识你的 Andruav 应用程序。除非你在设备上删除并重新安装 Andruav,否则此号码永远不会更改。此号码也不可编辑。
Access Code:访问代码是系统生成的密码,与你的电子邮件帐户一起用于在 Andruav 服务器上验证你的设备。与他人共享你的访问代码将允许他们在你的 Andruav 帐户上加入他们的设备。当你希望你的朋友作为 GCS 进入并与你共享飞行时,这将非常有用。
DroneKit:这是 3DR 开发的一个库,可使与 PixHawk、APM、SOLO 和几乎所有支持 MAVLINK 的板卡的连接更加可靠。
版权声明:本文为博主作者:EmotionFlying原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/qq_20016593/article/details/135597704